一种轮式隧道爬行器设计毕业论文
2020-04-10 16:55:18
摘 要
为了能够在隧道中安全便捷地探测渗漏水的位置,设计了一款能够被动越过1.5倍车轮直径高度障碍且具有三个自由度全方位移动的机器人。该机器人共计六个车轮,两侧采用两个Mecanum轮作为驱动轮,安装在四边形越障机构上。前后两端采用普通的橡胶轮作为越障轮,安装在双曲柄加弹簧的越障机构上。本文介绍了爬行器的组成和工作原理,计算并设计了曲柄连杆,电机等机构,同时运用CATIA软件及Adams软件完成了进行三维建模、虚拟装配和仿真模拟的工作,仿真结果表明该爬行器结构合理,可以完成三个自由度的运动且能够越过规定高度的障碍。最后使用Arduino板编写相关程序,完成了爬行器直行、横行、原地旋转的动作。
关键词:隧道爬行器;Mecanum轮;被动越障
Abstract
In order to detect the location of water leakage safely and conveniently in tunnels, a robot that can move across the obstacle whose the vertical height is 1.5 times wheel diameter and move with three degrees of freedom is designed. The robot has six wheels. The four wheels which are arranged on both sides are Mecanum wheels and the two wheels which are arranged on the front and back are rubber wheels. In this paper, the composition and working principle of the robot are introduced. Crank pitman mechanism, motor and other mechanism are designed. 3D modeling, virtual assembly and simulation are achieved by using CATIA and Adams. The result shows this robot can move with three degrees of freedom and have the great ability to move across the obstacle. Finally, the robot is controlled by using Arduino development board downloaded the control program.
Key Words:Tunnel crawler;Mecanum wheel;Passive obstacle surmounting
目 录
第1章 绪论 1
1.1 目的及意义 1
1.1.1 轮式爬行器介绍 1
1.1.2 六轮轮式爬行器的优点 1
1.2 国内外研究现状 2
1.3 研究内容介绍 3
1.4 小结 4
第2章 方案设计 5
2.1 爬行器介绍 5
2.1.1 爬行器车架介绍 5
2.1.2 爬行器双曲柄越障机构 5
2.1.3 爬行器侧部平行四边形越障机构 6
2.2 设计及计算 6
2.2.1 爬行器车轮设计 6
2.2.2 爬行器侧部平行四边形越障机构设计 8
2.2.3 爬行器曲柄连杆越障机构设计 9
2.2.4 爬行器车架设计 17
2.2.5 爬行器电机设计与选型 19
2.3 小结 23
第3章 爬行器运动学分析 24
3.1 爬行器逆运动学模型建立 24
3.2 小结 26
第4章 爬行器运动仿真 27
4.1 爬行器的Adams仿真 27
4.2 小结 28
第5章 爬行器控制 29
5.1 爬行器控制方式分析 29
5.2 爬行器代码编写 29
第6章 结论 33
参考文献 34
附录 35
致谢 43
第1章 绪论
1.1 目的及意义
近几十年,经济快速发展,公路的建设里程数越来越高[1],有资料显示我国的70%的国土面积是山地或者丘陵。在这种背景下,由于隧道可以提高土地利用率,所以为了提高土地的利用率,隧道的修建量不断增多。但因为隧道与其他建筑结构不同,隧道位于地下,其所处的地质条件复杂,由于地下的施工条件差,隧道的设计不合理等因素的影响,绝大多数隧道都存在不同程度的危害[2]。美国波士顿为了解决日益增长的土地紧张、噪音污染等问题,于1991年开始了外号为“大挖掘”的波士顿中心隧道工程,但是于2006年完工之后却发生了一系列如天花板塌陷的事故,造成了人员的受伤[3],无独有偶,在2012年的日本中部山梨县,一个名为Sasago的隧道也发生了隧道塌陷,并造成了人员伤亡和森林火灾。隧道坍塌事故对人们的生命财产造成了极大的威胁,也对社会造成了一定的恐慌[4]。隧道虽然方便了人们的出行,但是在方便出行前,我们更应考虑的是隧道的安全问题。所以,为了及时发现隧道的安全隐患,我们需要对其及时检测和维修。根据交通部2013年底发布的数据,我国已有11359座(约9605.6km)的公路隧道进入养护期[5]。需要检测和维修的隧道多且长。但目前,国内隧道检测与养护工作都由人工完成[6]。检测工人的检测任务重,工作量大,效率低。另一方面,修建时间较长的隧道有着照明不足,寒冷潮湿,灰尘较多等缺陷,甚至存在坍塌和瓦斯爆炸等事故的威胁[7]。这些无疑都对隧道的检测和维修工作增加了难度。
1.1.1 轮式爬行器介绍
当前,国内外机器人的移动方式主要有轮式、履带式、腿式等[8]。其中履带式由于其结构的特点,具有通过性能好,越障平稳性高,自复位能力强等优点,但是却也有如速度慢、功耗大、移动会破坏地面等缺点。腿式机器人有着结构自由度较多的优点,但因其机构复杂、难以控制、功耗大、成本高,所以不便于推广。轮式机器人具有承重大、机构简单、驱动和控制相对方便、行走速度快、工作效率高等优点,但缺陷是越障性能很差。
由于隧道属于交通的一部分,隧道的检测需要爬行器高效地完成任务,轮式机器人结构简单,行走速度快,工作效率高的特点正适合于这类任务,所以本文决定采用轮式爬行器来解决上述问题。
1.1.2 六轮轮式爬行器的优点
六轮爬行器是轮式爬行器中较为常见的种类。由于其轮子数目较多,可以安装较多的电机,且每个电机之间是相互独立的。从动力的角度来看,六轮爬行器的动力是二轮或四轮爬行器动力的1.5到3倍,所以六轮轮式爬行器具有更好的爬坡能力和加速能力。从越障的角度来看,当爬行器在凹凸不平的地面运行时,即使出现一两个轮子悬空的情况,六轮隧道爬行器仍然还能有三个及以上数目的轮子抓地,保证了爬行器运动的稳定性。由于多电机同时独立运行,可以免除差速器的设计,简化了爬行器的机械机构,并且当采用Mecanum轮作为驱动轮时,由于Mecanum轮独特的控制方式,可以使爬行器可以完成平移,前进,绕自身轴线旋转等运动,使爬行器的转向能力提高,并具有很高的灵活性。
于是,六轮爬行器拥有较强的爬坡能力,转向能力,越障能力和灵活性。并且六轮爬行器的研究较为成熟,有大量的资料可以参考。所以本文决定使用六轮轮式爬行器作为本文的设计类型,同时选择Mecanum轮作为爬行器的驱动轮。
1.2 国内外研究现状
为了能对隧道进行高效,详尽,安全的自动化检测,国内外进行了大量的相关研究。如图1-1(a)所示,Yu S N等人设计了一个可移动的平台,并装备了CCD摄像机拍取连续的照片来对隧道进行拍摄,当拍摄完毕后,通过机器视觉算法,检测隧道的裂缝[9-12]。F. Yao等人做了类似的工作,并加装了21个超声传感器和6个摄像头,实验表明当设备以20mm/s移动时,能够检测出隧道内壁14mm以上的变形[12, 13]。如图1-1(b)所示,日本搭建了一个以8吨卡车作为底座,装备机械手,隧道断面测量仪器,电子测距仪等设备的隧道检测系统,并通过锤击隧道,收集隧道的声音反应来判断隧道是否安全[14]。如图1-1(c)所示,IRIS Hyrail将探地雷达传感器安装在汽车前搭建的伸缩片上,用探地雷达位置装置旋转探地雷达的位置,使其可以探测隧道的两侧和上方的部分,并编写获取和处理探地雷达数据的程序[15]。瑞士的工程师Colas则为了防止隧道进一步的破坏设计了新的系统,这个系统配置了不同的机械臂和刷子,通过清洁隧道的方式来延长隧道的寿命[16]。
现有的研究中,为了隧道检测的方便,隧道检测仪器往往安装在较大型的车辆上,但是由于车辆较大的占地面积,在检测时往往会影响交通的通行。使用爬行器机器人对隧道进行检测,可以有效地缓解交通压力。多个爬行器机器人共同工作可以节省检测隧道的时
 间。
间。
 (a) (b)
(a) (b)
(c)
图1-1 隧道检测的相关研究
(a)用摄像头检测隧道的系统[8-10] (b)采用冲击声法的隧道检测系统[13]
(c)IRIS Hyrail系统[14]
1.3 研究内容介绍
本篇论文主要论述了四个部分,第一个部分是爬行器各个结构的方案选择及计算,包括爬行器的车轮选型,侧边平行四边形越障机构的设计,双曲柄越障机构的设计及优化,车架的设计及其各个车轮的电机选型。第二个部分是对爬行器的运动进行分析,并建立相关的模型。第三个部分是通过软件对所设计的爬行器进行运动仿真,并验证是否能够越过障碍。第四个部分是编写相关代码,控制爬行器的运动。所以本论文的安排如下:
第一章对论文进行概括和介绍。
第二章设计爬行器的结构及参数。
第三章研究并建立爬行器的逆运动学模型。
第四章介绍爬行器的运动学仿真。
第五章编写爬行器的控制代码。
第六章总结爬行器设计。
1.4 小结
在本章中,论文首先调研了此次设计的目的及意义,发现隧道爬行器是解决隧道检测任务多,效率低且危险这一问题的一个合理的解决方案。论文通过对比履带式爬行器,腿式爬行器及轮式爬行器,选择轮式爬行器作为设计基础,并最终选择六轮轮式爬行器作为设计的方案。论文通过国内外研究的对比,确定了此方案的创新性,并最后对整篇论文做出了概况和介绍。
第2章 方案设计
2.1 爬行器介绍
爬行器的设计包括机械结构的设计和运动程序的编程。机械部分主要由越障结构和驱动部分构成。
2.1.1 爬行器车架介绍
车架起着承载爬行器机构和相关设备的作用。车架的材料应具有强度高,质量轻,易加工的特点。所以选择使用铝合金作为车架的材料。设计的形状为长方形,这样的设计可以使得爬行器更加可靠。
2.1.2 爬行器双曲柄越障机构
爬行器双曲柄越障机构由平面双曲柄机构、减震弹簧、转向电机和导向前轮组成。当爬行器遇到障碍时,导向轮接触前方障碍,障碍给与导向轮的阻力使平面双曲柄机构产生被动的形变,从而使得曲柄杆被动地抬起,从而使得导向轮沿障碍的方向向上爬升并越过障碍[17]。曲柄之间的弹簧在越障的过程中,随着曲柄的抬起,弹簧不断收缩,起着蓄能减振的作用。而当爬行器越障结束,弹簧则释放储存的能量,使曲柄结构回到之前的状态。其结构如图2-1所示。
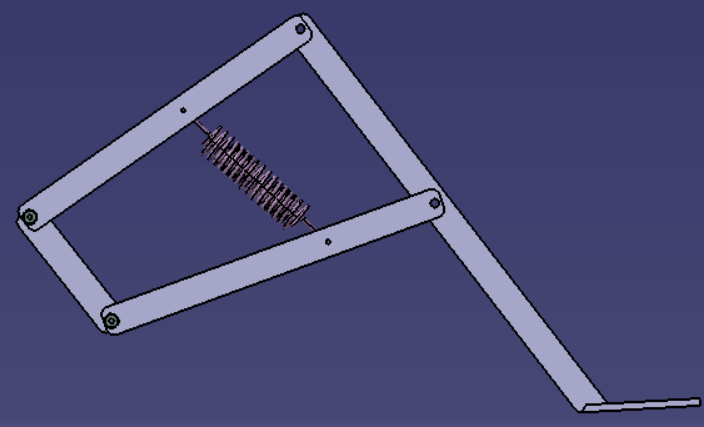
图2-1 爬行器双曲柄越障机构示意图
2.1.3 爬行器侧部平行四边形越障机构
侧部平行四边形越障机构由平行四边形机构和两个Mecanum轮组成。当一边的轮与障碍物接触时,由于阻力的作用,四杆组成的平行四边形机构会产生相应的形变,由于形变的存在,爬行器在越障时,重心降低,能更好地适应不同的地形。其结构如图2-1所示。
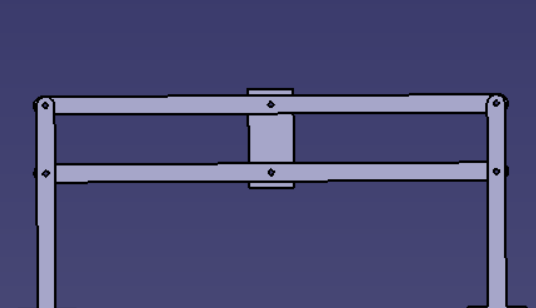
图2-2 爬行器侧部平行四边形越障机构示意图
2.2 设计及计算
2.2.1 爬行器车轮设计
1. Mecanum轮介绍
Mecanum轮(又称Swdish轮)是瑞士工程师BengtIro发明的一种特别的轮系。其轮子中分布着许多椭圆体状的辊子,这些辊子的轴线与轮毂的中心轴形成一定的角度,并且能够绕着自身轴线自由旋转。通过合理的布置Mecanum轮,可以使爬行器完成三个自由度的运动,分别为前进,左右横行和绕自身轴线旋转。其机构如图2-3所示。
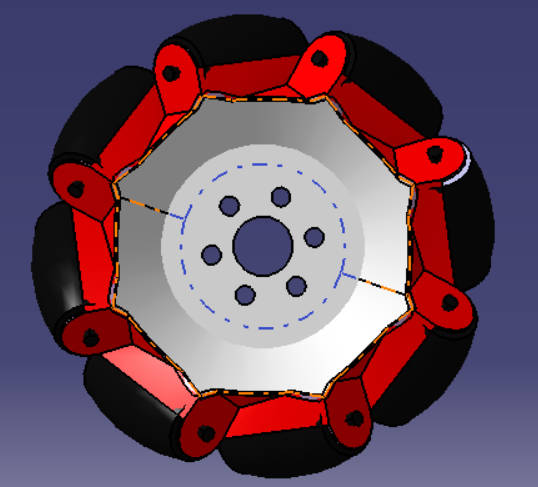
图2-3 Mecanum轮示意图
2. Mecanum轮的选型
采用双曲柄越障结构的越障爬行器,其越障高度大概为轮径的1.5倍左右。所以轮径的选择应根据实际情况决定。
本爬行器的假设应用环境为浙江省宁波市的一个隧道,其隧道中地面较为平整,没有较多的障碍,要通过的主要障碍为隧道两侧的阶梯,阶梯的高度H大概为20cm。所以Mecanum轮的轮径D的尺寸可以根据公式2.1确定。
所以根据计算,Mecanum轮的直径应大于133mm,现今Mecanum轮已经可以大量生产,分为1寸,2寸,3寸等等的规格,所以我们选用六寸(152mm)的Mecanum轮作为我们双曲柄越障结构的驱动轮。
市面上符合需求的Mecanum轮大概有三个商家,如表2-1所示。
表2-1 Mecanum轮规格表
商家 | 材料 | 承重(kg/个) | 重量(g) | 价格(元/个) |
RoboMasters | 铝合金 | 10 | 700 | 250 |
RObOTFUN | 铝合金 | 15 | 600 | 810.30 |
Robocup14101 | 铝合金 | 15 | 600 | 1310.30 |
本爬行器质量大约30kg左右,六轮分别承担的重量约5kg左右,隧道的地面环境较好,对轮胎的磨损较小,对轮胎的耐磨性要求较小,所以根据成本最低原则,选择使用RoboMasters的。
2.2.2 爬行器侧部平行四边形越障机构设计
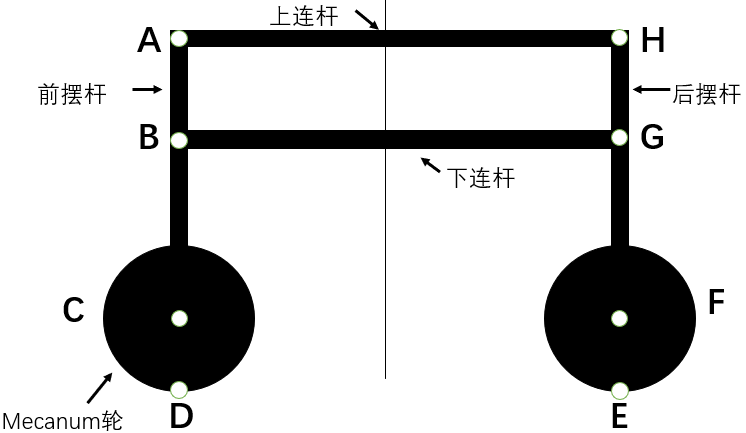 平行四边形越障机构主要由上连杆,下连杆,前摆杆,后摆杆及Mecanum五部分组成。如图2-4所示。
平行四边形越障机构主要由上连杆,下连杆,前摆杆,后摆杆及Mecanum五部分组成。如图2-4所示。
图2-4 爬行器侧部平行四边形越障机构简化图
由于工作环境不同,越障的高度等条件不同,四个杆的长度也不同。四个杆的长度配合也会影响爬行器的越障能力。为了更好地适应工作的环境,提高爬行器的越障能力。本节将对平行四边形越障机构进行设计。
在设计时,前后摆杆属于对称的关系,所以这里后摆杆的设计与前摆杆相同,就不再赘述。
下连杆的离地高度由所越过障碍的高度决定。为了能让爬行器顺利地通过障碍,下连杆的离地距离应略大于所跨过障碍的最大高度,即图中BD的长度大于离地高度H。如公式2.2所示。
关于前摆杆的下部分的长度,为了不影响Mecanum轮的运行,前摆杆的下部分的长度应大于Mecanum轮直径的一半。如公式2.3所示。
上下连杆之间距离决定了平行四边形越障机构运动在运动时是否会相互干涉。所以,为了在平行四边形越障机构在运动时,上下连杆之间不会相互影响,上下连杆之间的距离应该大于驱动轮直径的四分之一。即图中AB间的长度应大于Mecanum轮直径的四分之一。如公式2.4所示。
上下连杆的长度过小则会导致前后的驱动轮互相干涉,所以长度应大于驱动轮的直径。并且在驱动轮相互不干涉的情况下,上下连杆的长度也应大于所需的越障高度,因为要保证越障时,前后驱动轮的高度差大于越障距离。最后由于爬行器要承担相关探测设备,所以上下连杆的距离不应过小。如公式2.5与公式2.6所示。
结合公式2.2至公式2.6可得到平行四边形越障机构的各部分的长度范围。最后选择易于加工和测量的长度作为各部分的长度。于是,平行四边形越障机构设计完成,各部分的长度如下:
即。
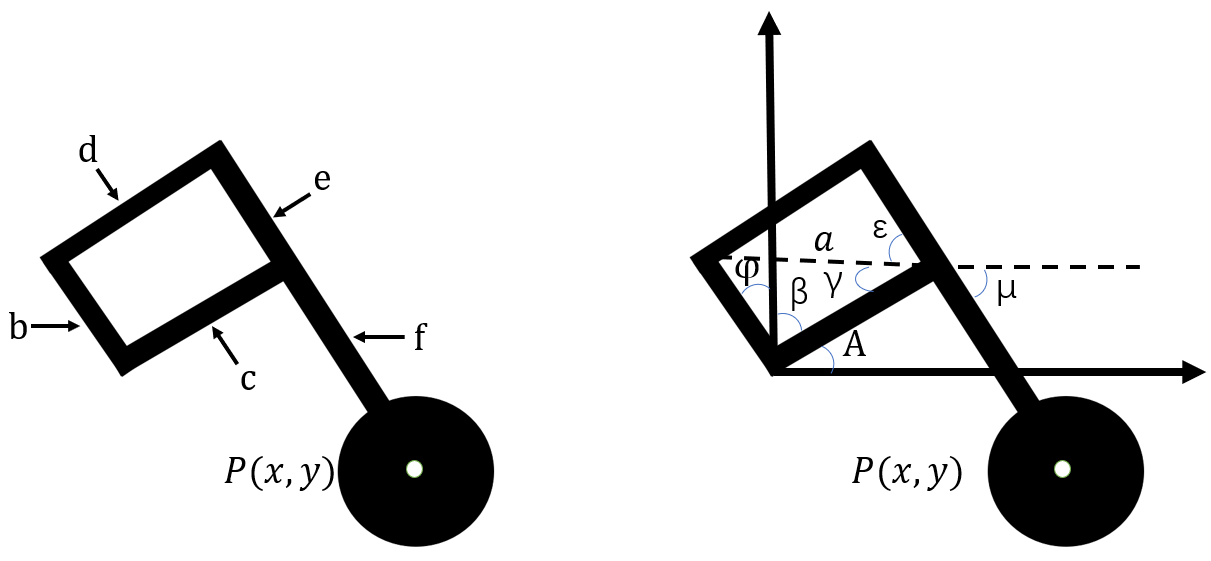
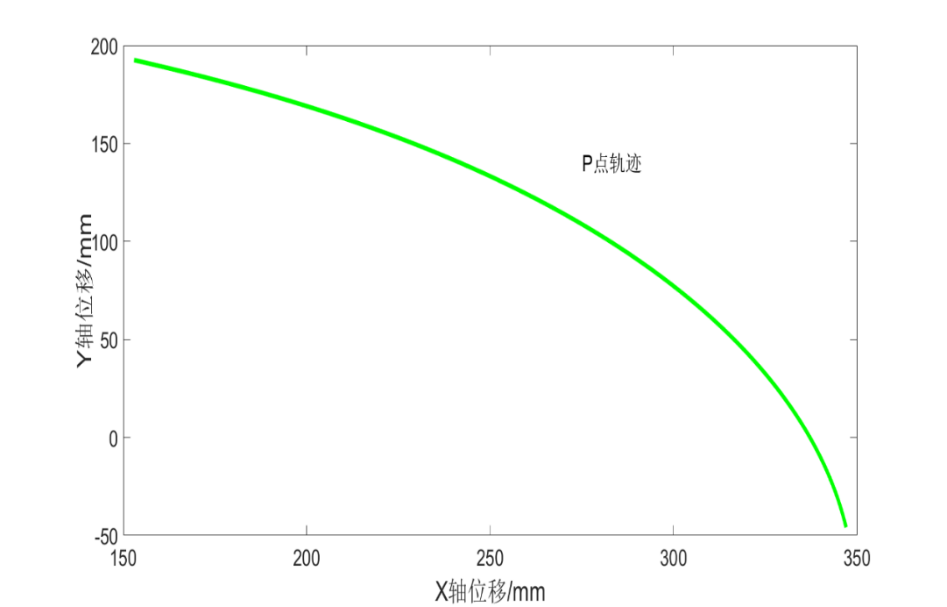
2.2.3 爬行器曲柄连杆越障机构设计
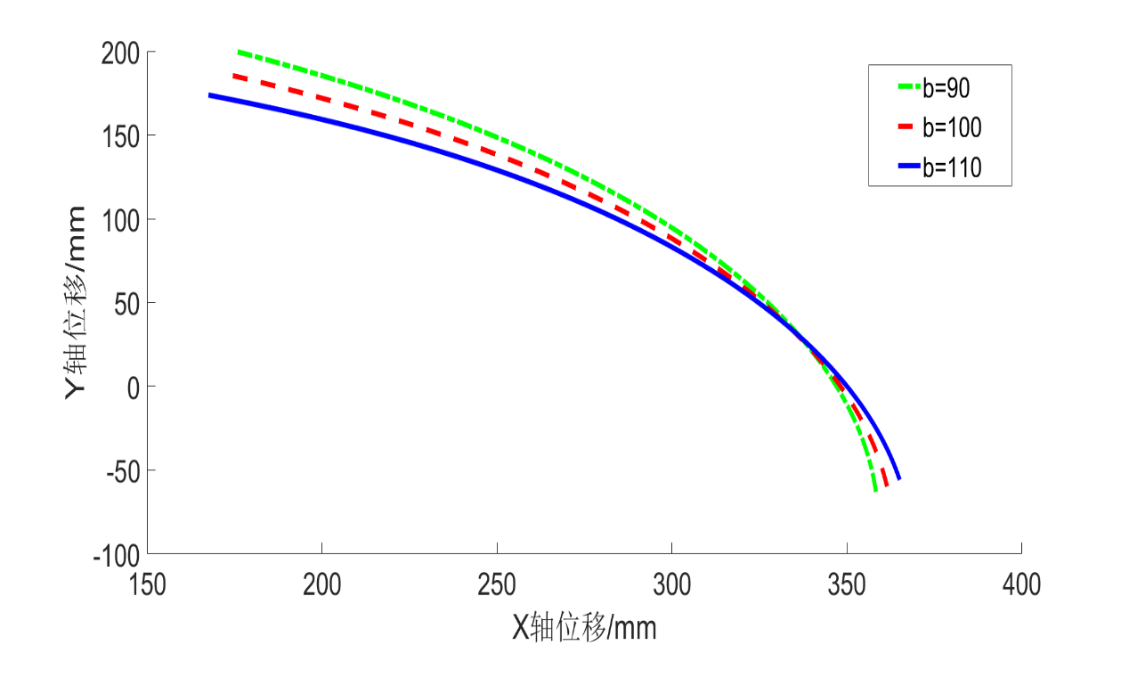
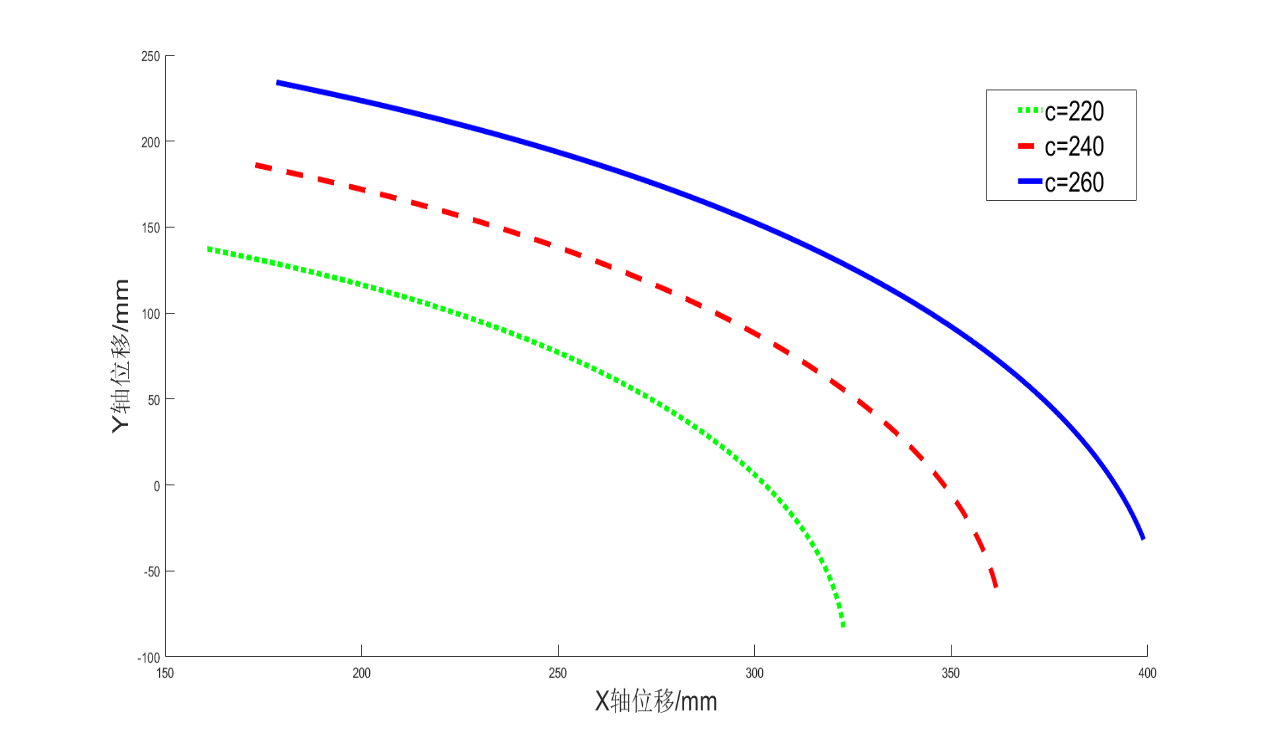
爬行器的双曲柄越障机构是本次设计中的重点,曲柄的运动范围的大小决定爬行器能否顺利地越过障碍,曲柄的运动速度决定爬行器越过障碍时所需的时间。所以此部分分为越障机构的初设计与越障结构的优化设计两部分。
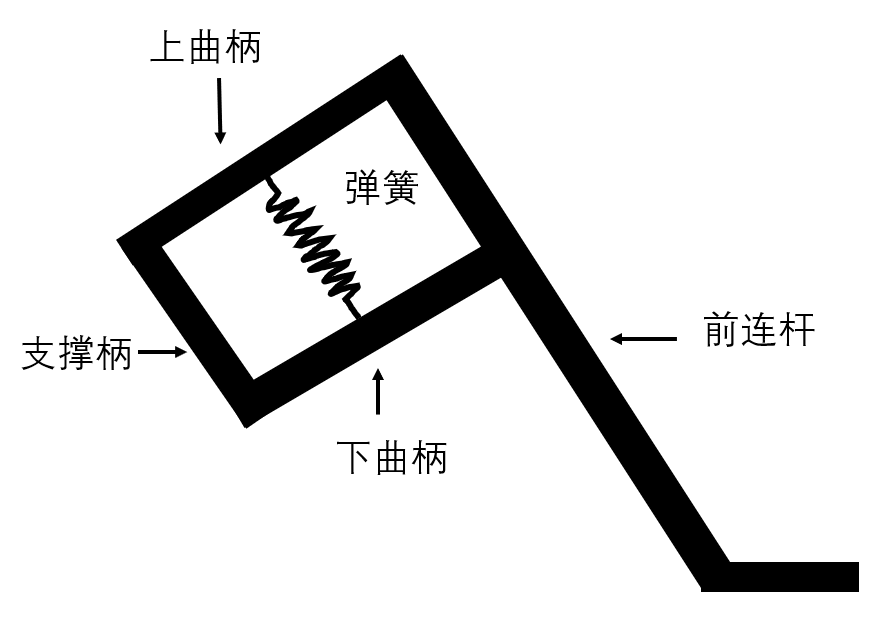
1. 曲柄连杆越障机构的初设计
由图2-5可知,曲柄越障机构由前连杆,上曲柄,下曲柄,支撑柄和弹簧组件构成。前连杆,上曲柄,下曲柄和支撑柄之间两两连接,相互之间可以互相转动,并共同组成一个不规则的四边形。弹簧组件的两端与上曲柄和下曲柄相连接。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: