1嵌入式低成本GNSSINS组合高精度定位技术研究毕业论文
2020-04-11 17:59:29
摘 要
本文基于Exynos4412嵌入式平台对GNSS/INS伪距紧组合定位的嵌入式实现进行了研究,通过实验将GNSS/INS伪距紧组合定位结果与单独GNSS伪距单点定位结果进行了比较,所得结果对于GNSS/INS紧组合的实现与验证具有重要的指导意义。
论文主要研究了Exynos4412嵌入式平台的搭建、嵌入式linux下的多线程编程、GNSS/INS紧组合系统状态方程与量测方程的建立、扩展卡尔曼滤波算法的实现等。
研究结果表明:GNSS/INS伪距紧组合定位精度明显优于GNSS伪距单点定位,Exynos4412处理器能够实时完成GNSS信号与INS信号解码以及卡尔曼滤波算法的计算过程。
本文的特色:搭建了嵌入式GNSS/INS组合定位实验平台,完成了嵌入式平台下GNSS/INS紧组合定位的实现。
关键词:GNSS/INS;紧组合;嵌入式;扩展卡尔曼滤波
Abstract
The embedded implementation of GNSS/INS pseudorange tightly coupled positioning based on Exynos4412 embedded platform was studied in this paper, the results of GNSS/INS pseudorange tightly coupled positioning and the results of GNSS pseudorange single point positioning was compared by experiments. It has important guiding significance for the realization and verification of GNSS/INS tightly coupled positioning.
The construction of Exynos4412 embedded platform,the multi-threaded programming in embedded Linux, the establishment of state equations and measurement equations for GNSS/INS tightly-combined systems and the implementation of extended Kalman filtering algorithm were mainly studied in this paper.
The results show that the precision of GNSS/INS pseudorange tightly coupled is obviously better than GNSS pseudorange single point positioning. Exynos4412 processor can complete the calculation process of GNSS signal and INS signal decoding and Kalman filter algorithm in real time.
The characteristics of this paper: An embedded GNSS/INS tightly coupled positioning experiment platform was built, and the implementation of tightly coupled positioning of GNSS/INS on an embedded platform was completed.
Key Words:GNSS/INS; tight coupling; embedded; Extended Kalman Filter
目 录
第1章 绪论 1
1.1 研究背景和意义 1
1.1.1 GNSS、INS定位特性 1
1.1.2 GNSS/INS组合方式概述 1
1.1.3 研究意义 3
1.2 研究现状 3
1.3 本文研究内容 4
第2章 嵌入式实验平台设计 5
2.1 嵌入式硬件系统设计 5
2.1.1 ARM核心板 5
2.1.2 电平转换电路 5
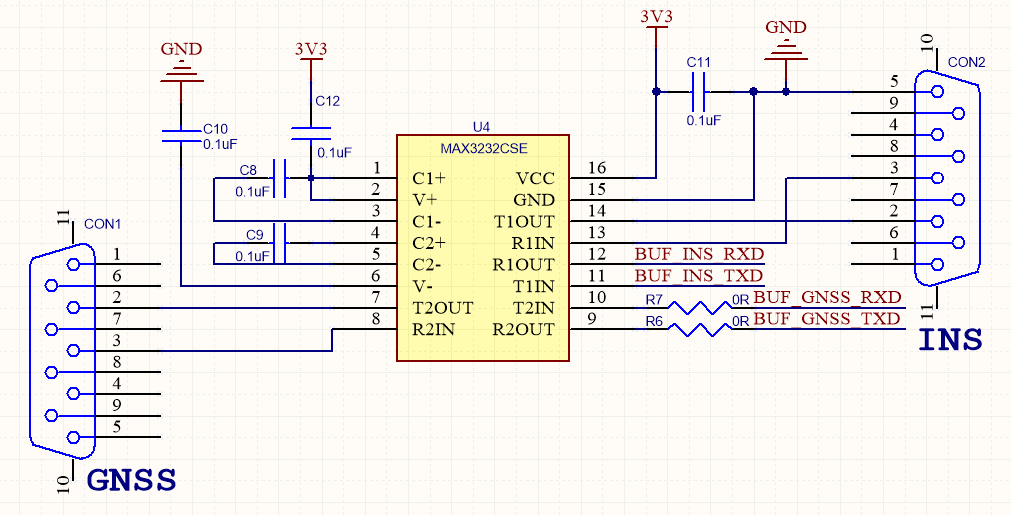
2.1.3 串口电路 6
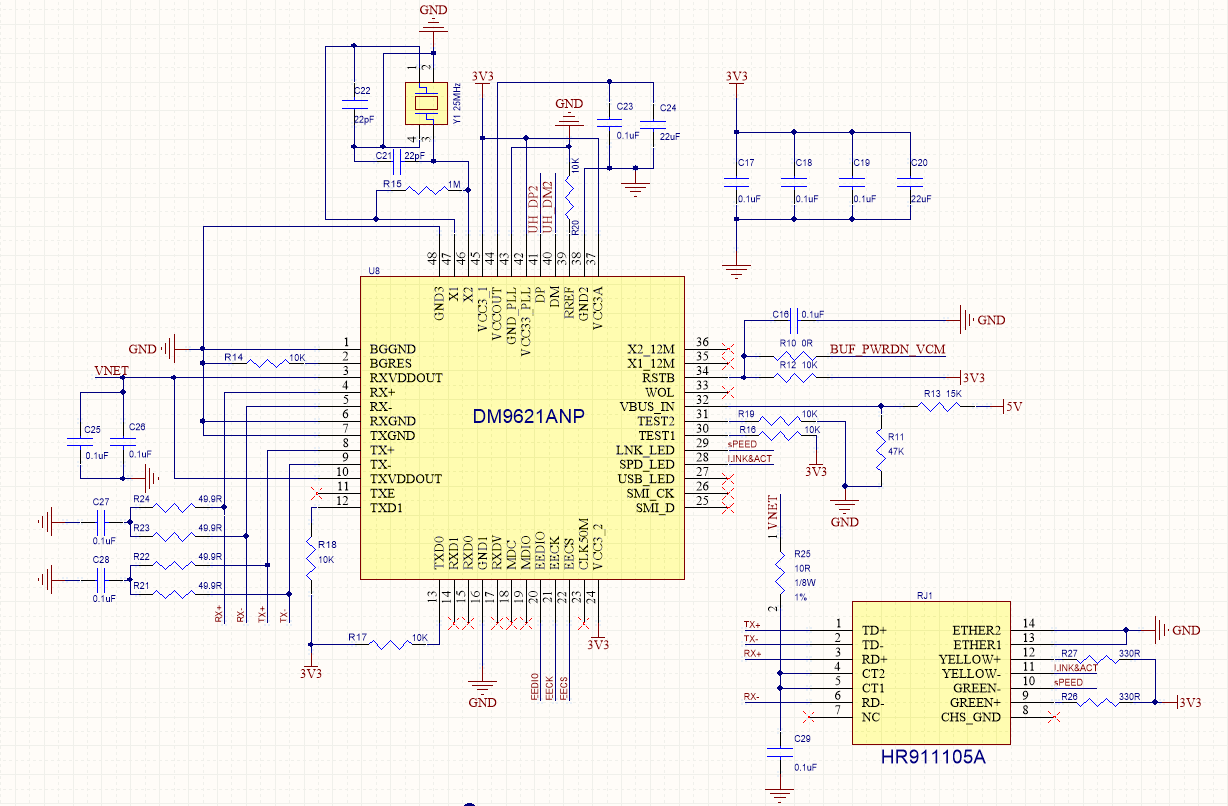
2.1.4 网口电路 7
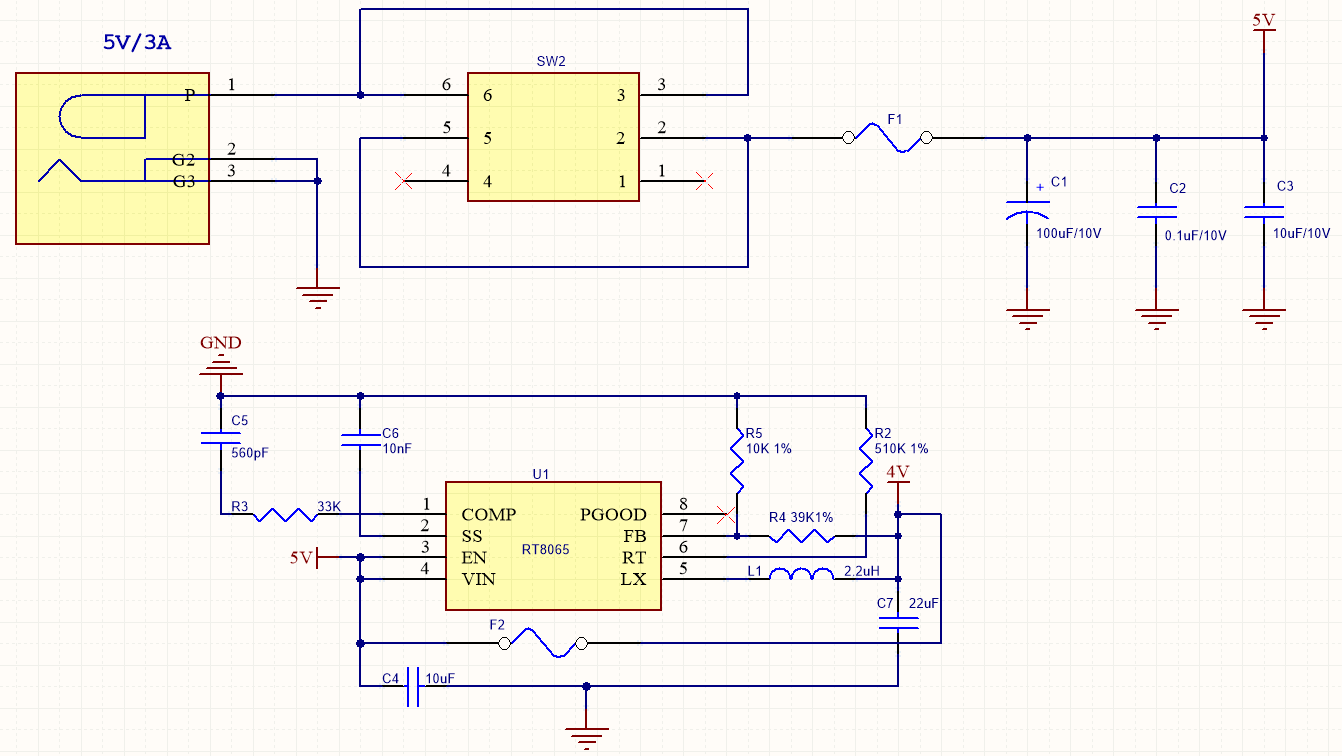
2.1.5 电源电路 8
2.1.6 GNSS板卡 8
2.1.7 惯导模块 9
2.2 嵌入式开发环境搭建 10
2.2.1 交叉编译环境搭建 10
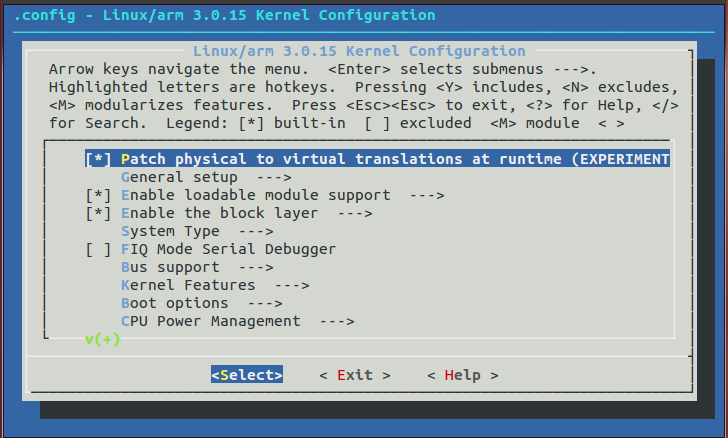
2.2.2 嵌入式linux系统移植 10
2.2.3 NFS服务器搭建 12
2.2.4 GDB调试环境搭建 12
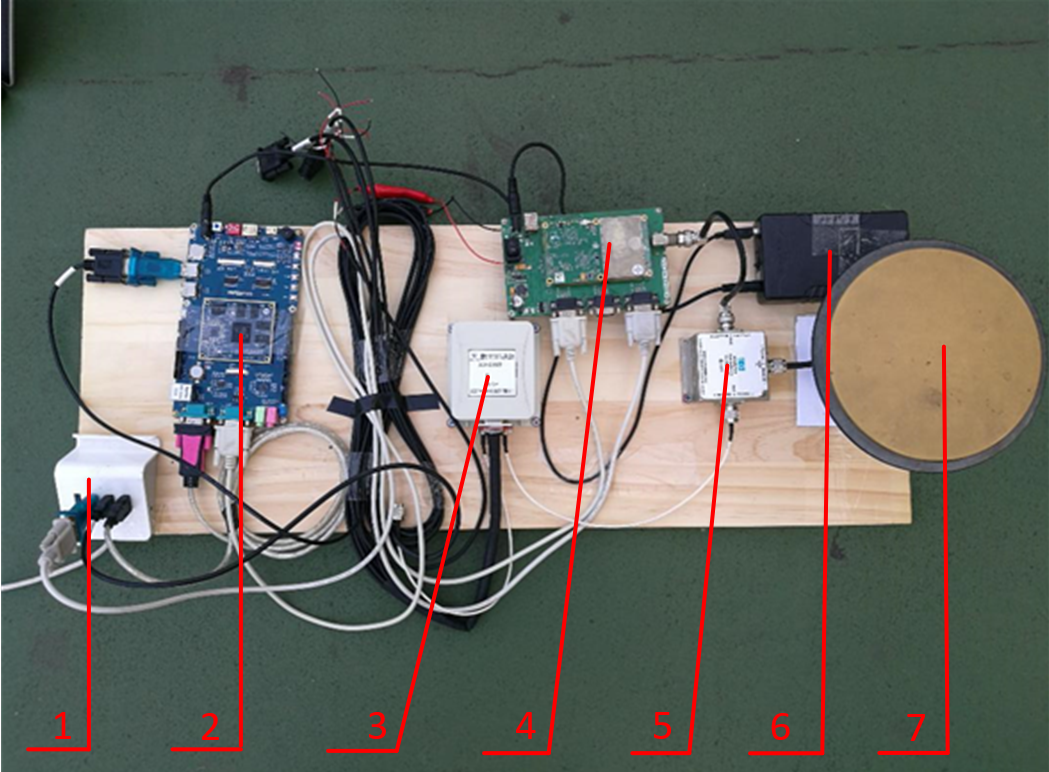
2.3 GNSS/INS紧组合实验平台实物图 13
2.4 成本估算 13
第3章 GNSS/INS紧组合理论基础 14
3.1 常用坐标系介绍 14
3.2 惯导导航方程 16
3.2.1 惯导微分方程 16
3.2.2 惯导微分方程求解 16
3.3 惯导误差方程 17
3.4 伪距单点定位观测方程 18
3.4.1 伪距单点定位原理介绍 18
3.4.2 伪距单点定位观测方程推导 18
3.5 卡尔曼滤波数学模型建立 20
3.5.1 状态方程建立 20
3.5.2 量测方程建立 20
3.6 扩展卡尔曼滤波 21
3.6.1非线性连续状态方程的线性化 21
3.6.2线性连续状态方程的离散化 21
3.6.3 线性离散系统的卡尔曼滤波 21
第4章 嵌入式GNSS/INS紧组合程序设计 23
4.1 linux多线程编程介绍 23
4.2 GNSS数据实时接收与解码 24
4.2.1 OEM4电文数据格式及解码流程 24
4.2.2 RTCM3.1电文数据格式及解码流程 26
4.3 INS数据实时接收与解码 28
4.4 结果输出和存储 28
第5章 实验验证与结果分析 29
5.1 实验背景介绍 29
5.2实验对比 31
5.2.1 GNSS/INS伪距紧组合定位 31
5.2.2 伪距单点定位 32
5.3实验结果分析 32
第6章 总结与展望 34
参考文献 35
致谢 37
第1章 绪论
1.1 研究背景和意义
1.1.1 GNSS、INS定位特性
GNSS(Global Navigation Satellite System)—全球卫星导航系统,能够为全球提供全天时、全天候的位置、速度、时间等信息,且精度不随时间变化,在使用伪距进行定位时,精度可达米级;使用载波进行定位时,精度可达厘米级。但是GNSS无法输出载体的姿态信息;GNSS数据频率较低,不适用于高动态的情况;当卫星信号受到阻挡时,GNSS更是无法提供定位信息。
INS(Inertial Navigation System)—惯性导航系统,作为一种自主导航系统,在短期内具有较高的定位精度,且其数据输出频率能够达到100HZ,具有较好的动态性能;但是由于惯性器件的误差,尤其是陀螺仪的误差,随着时间累积,INS定位误差将会迅速累积,无法长时间独立工作。
从上述分析可知,GNSS与INS具有明显的互补特性:GNSS能够校正INS的时间累积误差,能够为INS的校准提供帮助;而在INS辅助下,GNSS的动态性能与稳定性可以得到提升。利用两者的互补特性,将GNSS与INS结合,就能组成一种更为优秀的导航系统,其精度、动态性、可靠性均优于单一导航系统。
1.1.2 GNSS/INS组合方式概述
按照组合结构的不同,可将GNSS/INS组合方式分为三种:松组合(lossely coupled)、紧组合(tightly coupled)和超紧组合(Ultratightly Coupled,UTC)[1]。
松组合是最简单的组合方式,使用GNSS输出的位置/速度作为Kalman滤波器的测量输入,Kalman滤波器用它来估计INS误差,并对INS导航参数进行校正,矫正后的INS导航参数构成组合导航输出。该组合方式简单、易于实现,缺点在于至少要存在4颗卫星,才能得到完全可观的解。且这种组合导致滤波器的串联,使组合导航观测噪声时间相关,不满足Kalman滤波器观测噪声为白噪声的基本要求,严重时可能使滤波器不稳定[2]。松组合结构如图1.1所示。
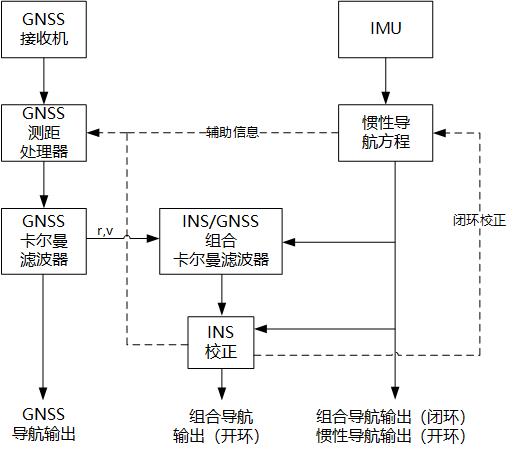
图1.1 松组合结构图
紧组合是一种相对复杂的组合方式,使用 GNSS的伪距、伪距率或载波相位等原始数据作为Kalman滤波器的量测输入,滤波器采用这些量测信息来估计INS和GNSS的误差,与松组合结构相同,组合导航参数是校正后的惯性导航参数。其中载波相位紧组合精度更高,但稳定性较差,而伪距、伪距率紧组合虽然精度较载波更低,但其稳定性更高、计算更简单,更适合于嵌入式平台。紧组合结构如图1.2所示。
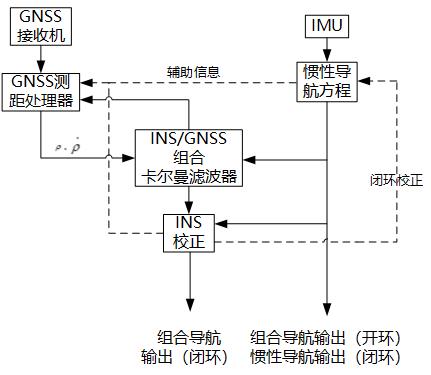
图1.2 紧组合结构图
超紧组合更为复杂,除了完成紧组合的工作外,还需使用校正后的INS信息对接收机内部的载波环、码环进行辅助跟踪,由于超紧组合涉及到对接收机内部电路的更改,国内条件不成熟,目前的研究主要停留在算法仿真。超紧组合结构如图1.3所示。
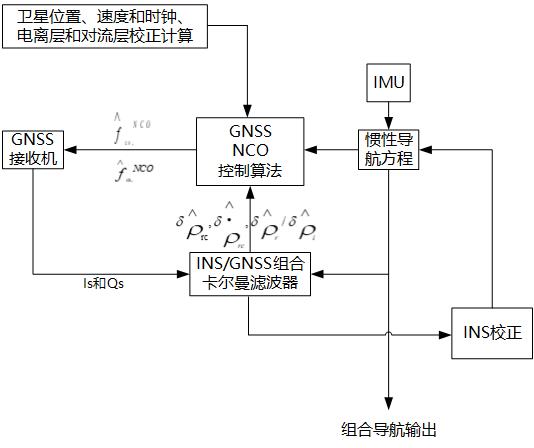
图1.3 超紧组合结构图
1.1.3 研究意义
随着高精度定位产业日趋成熟,亚米级导航定位装置需求旺盛。而目前GNSS/INS组合导航设备价格居高不下,严重制约了亚米级导航定位装置的推广及应用。研制低成本高精度GNSS/INS组合导航定位装置成为领域研究的热点,国内外已有大量学者对GNSS/INS组合定位算法进行了研究,本设计采用其中一种算法,对GNSS/INS组合定位的嵌入式实现进行了研究,随着我国北斗卫星导航系统的迅猛发展,本研究可以为将来BDS/INS组合定位、导航提供良好的实践基础。
1.2 研究现状
国内外学者对上述三种组合方式做过大量研究,其中国内的研究仍然集中在松组合[3][4];在紧组合上,袁俊刚、范胜林等在2010年对GPS/INS紧组合导航系统进行了仿真,表明组合系统可以明显的减少组合导航系统的误差,提高了系统的定位精度和可靠性[5]。Gianluca Falco、Marco Pini等在2016年,使用低价的MEMS惯性元器件与常用GNSS接收机,对GNSS/INS组合导航分别使用松组合、紧组合在市区的定位进行了比较,结果表明使用紧组合可以有效降低定位误差[6]。Godha的研究表明紧组合比松组合抗粗差能力更强[7]。吴富梅、唐颖哲在2010年对基于载波相位平滑伪距技术的GPS/INS组合导航进行了研究,采用松组合,进行事后解算,在不发生周跳的情况下,基于载波相位平滑伪距技术的GPS/INS组合导航的精度较伪距差分组合导航有较大的提高[8];反之精度提高不明显。刘洋在2016年对基于载波相位时间差分测速的GPS/INS组合导航进行了研究[9],采用松组合,进行事后解算,定位精度达到了0.7m;在超紧组合上,国内外研究较少,且更多集中在仿真,难度较大。
1.3 本文研究内容
考虑到松组合仍然有当可见卫星少于四颗时无法完成定位的弊端,而超紧组合涉及到GNSS接收机内部电路的更改,较为复杂,本文将采用伪距紧组合的方式进行本次研究。由研究现状可知,目前国内对于GNSS/INS紧组合的研究较多集中在事后解算上,本文将完成GNSS/INS紧组合实时定位的嵌入式实现。本文的主要研究内容可以分为以下几个方面:
- GNSS/INS伪距紧组合系统状态方程、量测方程的建立;
- 扩展卡尔曼滤波算法的实现;
- 嵌入式实验平台的搭建;
- 嵌入式下实时紧组合解算程序设计。
第2章 嵌入式实验平台设计
2.1 嵌入式硬件系统设计
嵌入式GNSS/INS紧组合硬件系统包括ARM处理器核心板、电源模块、串口模块、网口模块、GNSS板卡和惯导模块等,下面逐一介绍。
2.1.1 ARM核心板
本设计的ARM核心板搭载CortexA9内核的Exynos4412处理器,相较于传统ARM9内核的S3C2440处理器,Exynos4412为四核1.2GHZ,而S3C2440仅为单核400MHZ。显然Exynos4412性能更高,且其具有四核处理器更适合于高并发的应用场合,而价格只比S3C2440略高,使用Exynos4412作为核心处理器显然更具有性价比与前瞻性。
Exynos4412核心板组成框架图如图2.1所示。
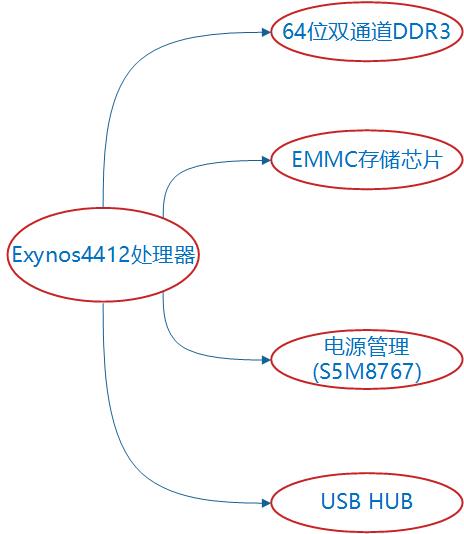
图2.1 Exynos4412核心板组成框架图
2.1.2 电平转换电路
Exynos4412处理器I/O口电平为1.8V,而串口、网口芯片都是3.3V电平,需要进行相应的电平转换。如图2.2所示,本设计中使用的74ALVC164245DGG为16位带三态的电平转换芯片,使用双电源供电,可将1.8V逻辑电平转换为3.3V逻辑电平。
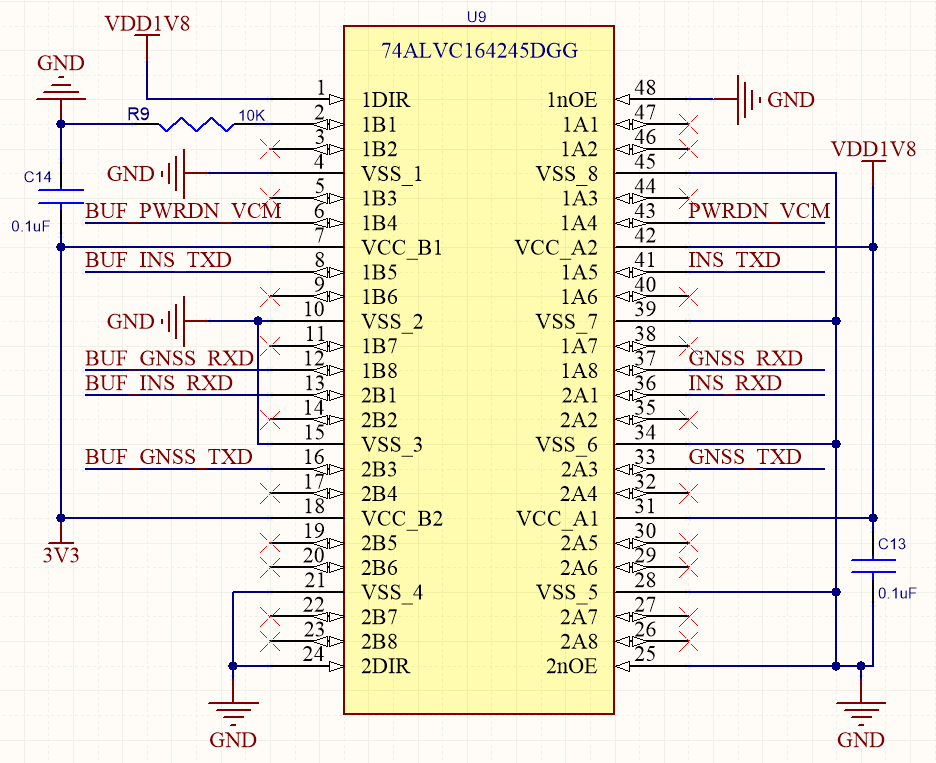
图2.2 1.8-3.3V电平转换电路
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: