特殊场景下自动驾驶汽车轨迹跟踪控制方法研究毕业论文
2020-04-12 16:13:02
摘 要
道路拥堵及交通事故频发很大程度上是由人的因素造成的,主要是由驾驶员驾驶经验不足、生理状况不佳、驾驶时注意力不集中等因素导致。自动驾驶汽车可以从根源上解决这一问题,因此众多国内外学者展开对自动驾驶汽车相关技术的研究。
轨迹跟踪控制是自动驾驶汽车的关键技术之一,其对于汽车实现自动驾驶具有非常重要的意义。目前的自动驾驶汽车轨迹跟踪控制算法较少考虑到恶劣天气、低附着湿滑路面这两类特殊场景工况下的轨迹跟踪控制问题,而汽车在特殊场景下行驶时极易失去控制,从而导致车辆侧滑、驶离车道甚至侧翻等安全事故。因此,对于特殊场景下自动驾驶汽车轨迹跟踪控制问题的研究具有非常重要的意义。针对特殊场景下自动驾驶汽车轨迹跟踪控制问题,本文将展开以下主要研究内容:
首先将研究国内外自动驾驶汽车相关技术的研究现状,主要研究目前自动驾驶汽车轨迹跟踪控制策略,比较目前各类轨迹跟踪控制方法优劣,最终选定模型预测控制理论作为特殊场景下自动驾驶汽车轨迹跟踪控制理论。
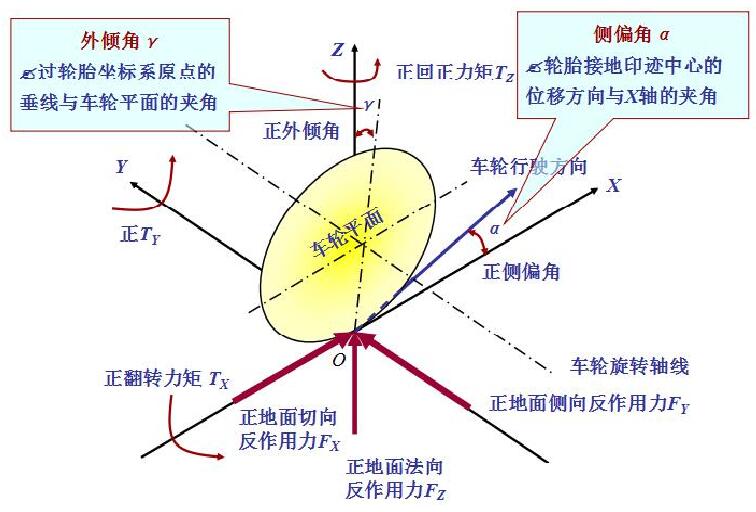
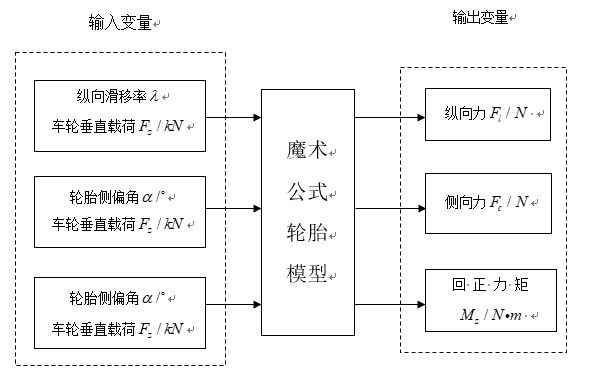
然后研究天气,路面附着系数对自动驾驶汽车轨迹跟踪控制的影响。轮胎作为连接车身与地面的唯一一个部件,天气,路面附着系数对自动驾驶汽车轨迹跟踪控制的影响几乎都通过轮胎附着力展现出来。此外还需要考虑车辆动力学特性。针对上述问题,借助魔术轮胎公式建立轮胎模型,研究轮胎特性。并在提出合理假设的前提下建立3自由度汽车非线性动力学模型,为下面的特殊场景下自动驾驶汽车轨迹跟踪控制问题建立模型基础。
接着对模型预测控制(Model Predictive Control,MPC)理论进行介绍。并将研究重点放在基于状态空间方程的模型预测控制问题上。此外还将完成基于状态空间方程模型的预测方程的推导工作,及如何将特殊场景下自动驾驶汽车轨迹跟踪带约束求解的优化问题转化成标准二次规划问题。
最后在上面研究工作的基础上完成所设计的基于MPC的特殊场景下自动驾驶汽车轨迹跟踪控制器设计工作,并充分考虑到特殊场景下轨迹跟踪控制的约束问题。最后通过搭建的Simulink/CarSim联合仿真平台对所设计的基于MPC的特殊场景下自动驾驶汽车轨迹跟踪控制器进行低附着路面下双移线轨迹跟踪测试。仿真结果表明,所设计的轨迹跟踪控制器能在保证车辆行驶稳定性的前提下,实现特殊场景下自动驾驶汽车的轨迹跟踪控制问题,并能取到较优的跟踪效果。
关键词:特殊场景;自动驾驶汽车;轨迹跟踪控制;模型预测控制;Simulink/CarSim联合仿真平台
Abstract
Traffic jams and frequent traffic accidents are largely caused by human factors, which are mainly caused by drivers’ lack of driving experience, poor physical conditions, and lack of attention when driving. Self-driving cars can solve this problem from the root, so many scholars at home and abroad have launched research on the technologies related to self-driving cars.
Trajectory tracking control is one of the key technologies of self-driving cars. It is of great significance for autos driving. The current self-driving vehicle trajectory tracking control algorithm seldom considers the trajectory tracking control problem under the special conditions of severe weather and low adhesion wet and slippery road conditions, and the automobile easily loses control when it is driven in a special scene, resulting in Vehicles slip sideways, drive off lanes, and even rollovers. Therefore, it is very important to study the trajectory tracking control problem of autopilot cars in special scenes. In view of the problem of trajectory tracking control for self-driving cars under special scenarios, this article will develop the following main research contents:
Firstly, the research status of auto-driving cars related technologies at home and abroad will be studied. The current trajectory tracking control strategies for self-driving cars will be mainly studied. The advantages and disadvantages of various current trajectory tracking control methods will be compared. Finally, the model prediction control theory will be selected as a self-driving car under special scenarios. Trajectory tracking control theory.
And then study the influence of weather on the trajectory tracking control of self-driving cars. Tyres are the only component that connects the body to the ground. Weather and road surface adhesion factors influence the trajectory tracking control of self-driving cars almost entirely through tire adhesion. In addition, vehicle dynamics needs to be considered. In response to the above problems, a tire model was established using the magic tire formula to study the tire characteristics. And on the premise of proposing reasonable assumptions, a 3-DOF automotive nonlinear dynamics model is established to establish a model basis for the trajectory tracking control problem of autonomous vehicles under the following special scenarios.
Then introduced the Model Predictive Control (MPC) theory. The research focuses on model predictive control based on state-space equations. In addition, the derivation of prediction equations based on the state space equation model will also be completed, and how to optimize the problem of trajectory tracking with constraints in auto-driving cars under special scenarios into standard quadratic programming problems.
Finally, on the basis of the above research work, the designed trajectory tracking controller design of the self-driving car under the special MPC-based scene is completed, and the constraints of the trajectory tracking control under the special scene are fully considered. Finally, through the built Simulink/CarSim co-simulation platform, the self-driving vehicle trajectory tracking controller in the special scene based on MPC was designed to perform double-track trajectory tracking under low-adhesion road. The simulation results show that the designed trajectory tracking controller can realize the trajectory tracking control problem of auto-driving cars in special scenes under the premise of ensuring the stability of vehicle driving, and can obtain better tracking results.
Keywords: Special scene;Autonomous vehicles;Trajectory tracking control;Model Predictive Control;Simulink/CarSim Co-simulation Platform
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: