汽车制动器装配线自动包装工艺设计毕业论文
2020-04-12 16:36:50
摘 要
自动化生产线是是实现生产自动化的关键组成部分,是实现工业4.0的重要一环。其中自动化运输机和机器人是自动化的两个典型的组成部分。输送机主要包括带式输送机、辊子输送机等十六种。目前机器人的研究与运用发展的比较快,国外更有库卡、ABB、安川和发那科四大机器人家族,在运用机器人的过程中,可以选型,但由于抓取对象的结构的不同,机器人的末端执行器却各不一样。本次设计,针对汽车制动器的结构设计装配线自动化包装线,其中包括输送机的设计、机器人选型、末端执行器的设计和周转箱的选用。输送机主要是设计辊子输送机,包括辊子的半径、厚度确定、辊子链轮设计、辊子间距确定、链条选型、主动链轮设计、减速机选择,运输机高度长度确定等。末端执行器的设计包括末端执行器的手指的夹持力计算、驱动力计算等。
关键词:自动化包装、输送机、机器人
Abstract
Automatic production line is a key component of realizing production automation and an important part of realizing industrial 4. Automated transporters and robots are two typical components of automation. Conveyor mainly includes sixteen types of belt conveyor, roller conveyor and so on. At present, the development of robot research and application is faster and faster. There are four family of KUKA, ABB,Yaskawa and Fanuc, which can be selected in the process of using robots. However, because of the different structure of the grabbing objects, the end executor of the robot is different. This design, according to the structure of the car brake design assembly line automatic packaging line, including the design of the conveyor, robot selection, the end of the design of the actuator and the selection of the turnaround box. Conveyor is mainly designed roller conveyor, including the roller radius, thickness determination, roller chain wheel design, roller spacing determination, chain type selection, active sprocket design, reducer selection, conveyor height length determination and so on. The design of the end effector includes the clamping force calculation of the end effector and the calculation of the driving force.
Key words: automatic packaging, conveyor, robot
目录
第1章 绪论 6
1.1 课题背景和意义 6
1.2 包装自动化的发展现状与趋势 6
1.3 本课题研究内容 7
第2章 制动器结构分析及方案确定 9
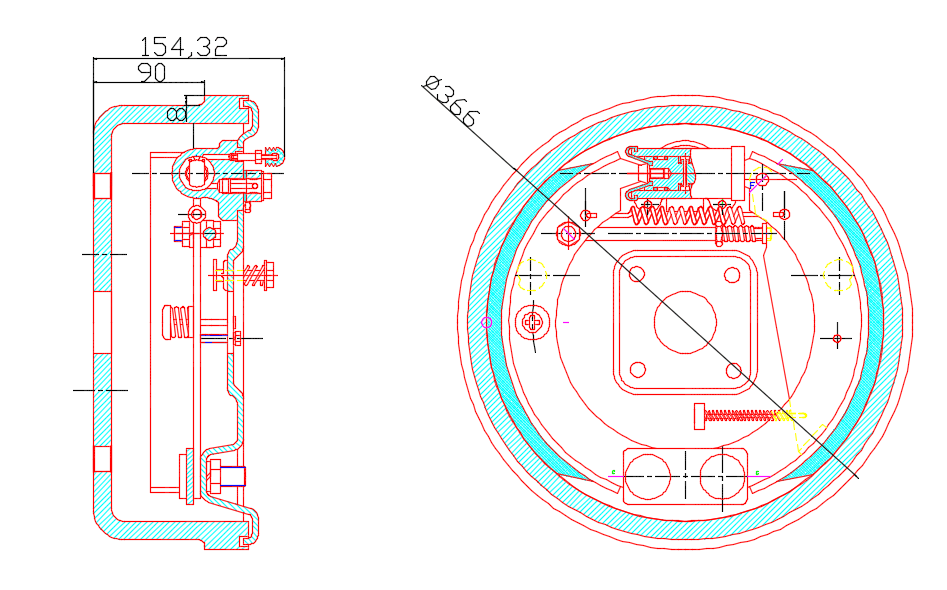
2.1 制动器结构分析 9
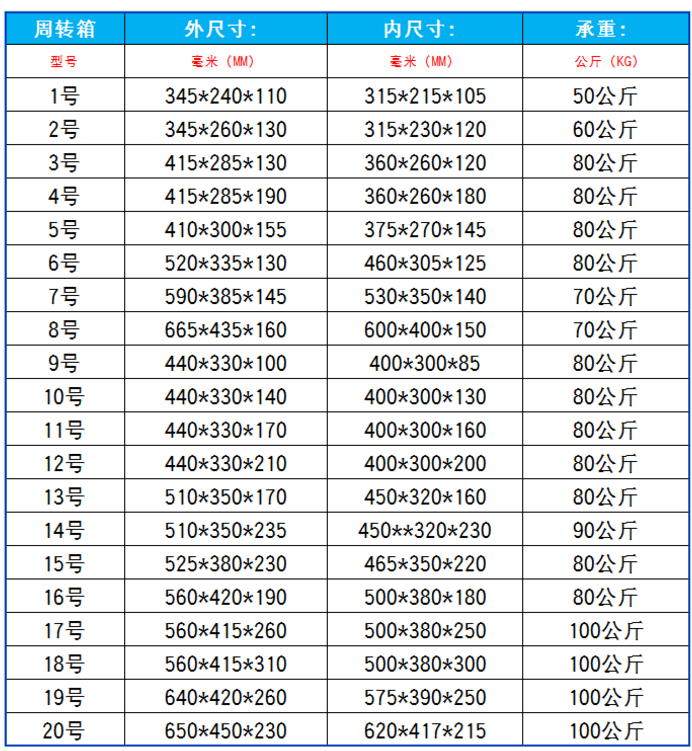
2.2 装载容器选择 11
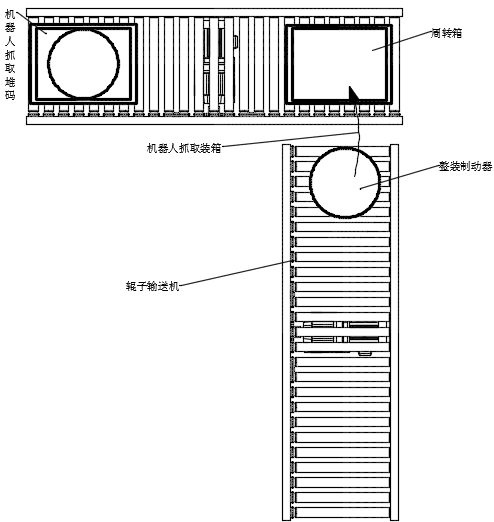
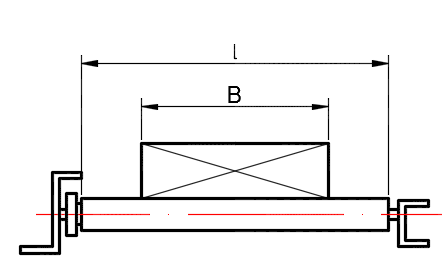
2.3 输送方式选择 12
第3章 辊子运输机设计 14
3.1 辊子运输机的选择 14
3.1.1 传动方式的选择 14
3.1.2 辊子形式的选择 14
3.1.3 辊子支撑方式的选择 15
3.2 辊子参数计算 15
3.2.1 辊子长度 15
3.2.2 辊子直径的确定 16
3.2.3 辊子厚度的确定 17
3.3 链条的选择及辊子链轮的设计 18
3.3.1 链条的选择 18
3.3.2 辊子链轮的设计 19
3.4 轴承的选择与校核 22
3.4.1 轴承选择 22
3.4.2 轴承校核 25
3.5 定轴的设计 25
3.6 辊子装配图 25
3.7 主链轮设计 26
3.7.1 主链轮材料的选择 26
3.7.2 主链轮参数设计 26
3.8 辊子间距 27
3.9 子输送机的长度及产品分布 28
3.9.1 辊子输送机的长度 28
3.9.2辊子及产品分布 28
3.10 减速电机的选型 29
3.10.1 链条牵引力及链条校核 29
3.10.2 功率计算 30
3.10.3 主链轮转速 30
3.10.4 减速机的选择 31
3.11 张紧装置 31
3.11.1 张紧链轮的设计 32
3.11.2 定位套设计 32
3.12 输送机高度 32
3.13 机架设计 33
章末总结 34
第4章 机器人选型和末端执行器机构确定 35
4.1 机器人选型 35
4.2末端执行器结构 35
4.2.1 驱动方式选择 35
4.2.2 手指加紧力计算 36
4.2.3 驱动力计算 36
总结 39
参考文献 41
致谢 42
第1章 绪论
1.1 课题背景和意义
随着经济的发展,人们对产品的生产要求逐步提高,21世纪以来,工业领域结构发生重大变革[1],对自动化设备的需求量越来越高。改革开放以来,人口红利使中国的制造业快速发展,但近年来许多制造企业面临着严峻的挑战,纷纷进行结构调整,淘汰落后生产力,引进自动化生产设备。调查显示,2009年,中国国内对自动化生产线的需求只有7800条,到了2014年,需求量提升到2.1万条,国内自动化生产线远远不能满足需求,同时国内自主研发自动化生产线的企业较少,高端自动化生产线高度依赖进口,自动化生产线市场巨大。
现代工业实现高效安全及优质生产的重要保证,完全依赖于各种自动控制技术的保证作用[2]。目前很多行业,比如化工、生物、电力等的生产规模越来越大,很多工作人力所不能承受的,自动化生产线的研究和应用,正好可以代替人去做难度比较大,或者对人身体有害的工作,减低了危险性,极大程度减少了事故的发生。另外,由于自动化设备由各种机械设备,控制系统组成,只要不断地提供能源,动力,它就会持续工作,极大地提高了生产效率。初期,企业投入自动化线的资金会比较大,但由于自动化生产效率高等特点,减少了很多员工的适用,降低了生产成本。
中国汽车工业的蓬勃发展,带动了汽车配件的快速发展,汽车配件用品的流通领域也在发生重大变化。制动器传统的木箱单件包装,效率低,成本高,同时耗费了巨大的人力,不符合时代发展的潮流,将被淘汰。研制制动器的汽车零件自动包装装备能够有效地解放繁重的人力劳动,降低企业的包装运输成本,提高企业的竞争力。
1.2 包装自动化的发展现状与趋势
自动化包装机械应用于各个工业领域,与输送机、机器人、自动储存、检测装置等组成自动包装线[3]。国外自动包装生产线起步较早,趋于成熟,而我国的自动化包装仍处于摸索阶段。1913年美国工程师亨利-福特首次将流水线运用于生产,后来流水线被各国运用于生产,并在流水线中逐步加入自动化设备,使生产更具效率。我国自动化包装起步较晚,建国初期,我国部分轻工业开发了一批专用输送设备为食品,五金,烟酒等配套设备使用,但是这个时候,自动化包装还没成行业。改革开放后,我国自动化领域发展迅速,自动化水平提高,一些自动化单机设备层出不穷,国内一些企业也开始大量引进自动化设备[4],也开始设计生产,但由于水平有限,自行开发能力弱,还处在测试和仿制阶段。
机器人的出现使包装自动化向智能化发展。机器人集电气、机械、控制等一体,大大提高了包装效率。瑞典ABB公司开发了世界首台全电子控制工业机器人IRB6,用于工件放置和堆叠材料[5]。随着计算机技术,多轴运动控制技术和侍服技术的发展成熟,日美韩德等国家工业机器人的研发取得了良好的成绩,相应推出了自己的码垛机器人,如德国的KUKA系列,日本的OKURA和FANUC以及FUJI系列瑞典的ABB系列等。目前国外一些国家的包装自动化生产线已经得到普及,特别是在日本和韩国,将机械手、柔性制造系统和柔性制造单元结合起来是很早,从而从根本上改变机械制造系统的手动操作状态,实现全自动化。国内也在一直追赶着外国先进技术的步伐,少部分机构取得了可观的成绩。比如:上海交通大学机器人研究所与沃迪包装材料科技有限公司采用新型材料,开发出了具有独特的线性四连杆机构,生产能力强的新一代TPR系列码垛机器人,尽管如此,国产机器人难以达到要求的质量。许多机器人需要进口[6]。机器人主要经历了3个阶段:示教再现机器人、离线编程机器人和智能机器人。智能机器人不但能够感知外界环境,而且能独立判断、记忆、推理和决策。它通过传感器获取外界的信息,并进行反馈,然后根据具体情况调整工作状态,完成工作。
总而言之,我国自动化包装落后于国外,还有很长一段路要走。由于人们对产品的质量要求越来越高,对环境保护意识提升,智能和环保是自动化包装的趋势。这就要求自动化机械具有自动识别的功能[7], 除了能够识别对象的位置外,还会识别对象的材料、弹力等。
1.3 本课题研究内容
本设计基于鼓式制动器的结构,自动生产线自动包装在工业生产中的应用,以及对工业机器人的类型,功能,应用等分析,采用自动化输送系统,选用机器人并设计抓取制动器的末端执行器结构,选用装载容器,抓取制动器装配在装载容器中,实现汽车制动器自动包装。具体内容如下:
(1)根据鼓式制动器的结构外型,设计包装工艺方案。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: