异构电动汽车的协同控制研究毕业论文
2020-04-13 11:24:49
摘 要
本文以实现异构电动汽车之间的协同控制为目的,将模型预测控制作为理论基础,设计了建立在汽车运动学模型和动力学模型上的协同控制器。其控制的核心思想是轨迹跟踪,以领航车辆完成对参考轨迹的跟随行驶为前提,后续车辆再以相邻前车的行驶轨迹作为期望轨迹,完成轨迹跟踪。由于轨迹跟踪既要实现轨迹位置的跟随,对期望轨迹的通过时间也有要求,因此其应用于车车跟随控制上也能实现横向轨迹与纵向车距的兼顾控制。其中,运动学模型是以汽车的速度和前轮转角作为控制量,实现低速工况下的协同控制;动力学模型是以前轮转角为控制量,结合车距变化情况对车速实施bang-bang控制,实现高速工况下的协同控制。根据控制器在MATLAB中的仿真结果来看,两种模型的协同控制器的控制效果均较理想。
关键词:异构车辆;轨迹跟随;模型预测控制;动力学模型;协同控制
Abstract
This paper aims to achieve the cooperative control between heterogeneous electric vehicles. Based on the model predictive control, the model is based on the kinematics model and dynamic model of the vehicle with the collaborative controller. The core idea of the control is trajectory tracking. Under the premise that the leader vehicle completes the following trajectory of the desired trajectory, the subsequent vehicle uses the trajectory of the adjacent preceding vehicle as the desired trajectory to complete the trajectory tracking. Since the trajectory tracking not only needs to follow the position of the trajectory, but also has the requirement of the passage time of the desired trajectory, it can also be applied to the vehicle cart following control to realize both the lateral trajectory and the longitudinal vehicle distance control. Among them, the kinematics model uses the speed of the car and the front wheel angle as the control volume to achieve the coordinated control under low speed conditions; the dynamic model is the control value of the previous wheel angle, and the bang-bang control of the vehicle speed is implemented in combination with the change of vehicle distance. Realizes coordinated control under high speed conditions. According to the simulation results of the controller in MATLAB, the control effects of the two model collaborative controllers are ideal.
Key Words:Heterogeneous vehicles; trajectory following; model predictive control; dynamic model; Collaborative control
目录
第1章 绪论 1
1.1 课题背景及研究意义 1
1.1.1 课题背景 1
1.1.2 研究意义 2
1.2 车辆协同控制的研究现状 3
1.3 本文主要内容 7
1.4 本文研究的主要技术路线 8
1.5 本章小结 8
第2章 模型预测控制 9
2.1 模型预测控制的基本原理 9
2.2 模型预测控制的数学形式 10
2.3 模型预测控制的分类 12
2.3.1 集中式模型预测控制 13
2.3.2 分散式模型预测控制 14
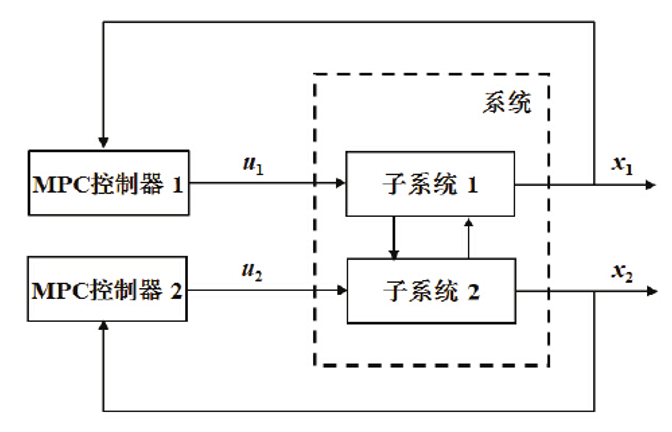
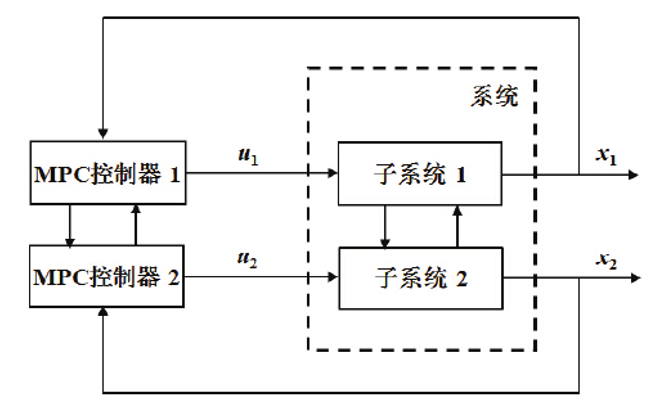
2.3.3 分布式模型预测控制 15
2.4 本章小结 16
第3章 基于运动学模型的异构车辆协同控制 17
3.1 运动学模型适用工况及编队形式 17
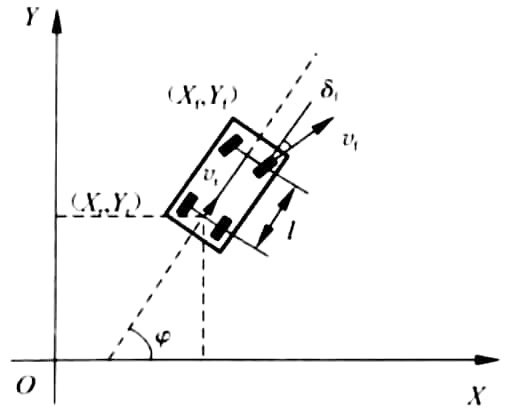
3.2 车辆运动学建模 18
3.3 运动学线性时变预测模型 20
3.4 基于运动学模型的协同控制器设计 21
3.4.1 目标函数设计 21
3.4.2 约束条件设计 24
3.5 仿真验证与分析 26
3.5.1 车辆参数与仿真工况设置 26
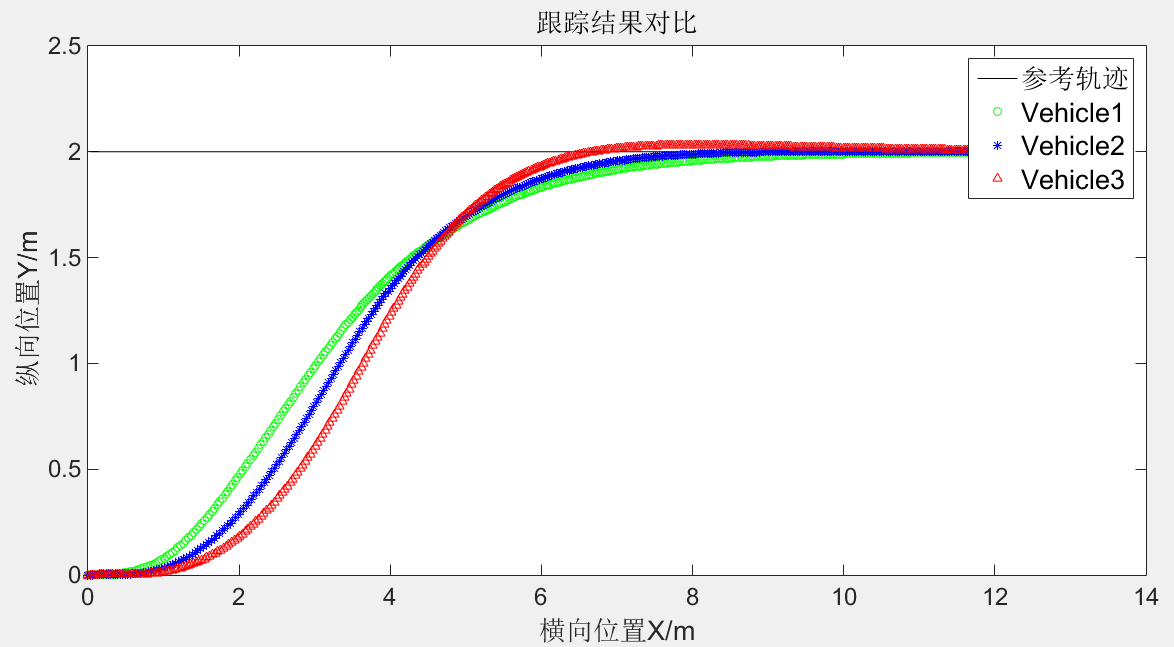
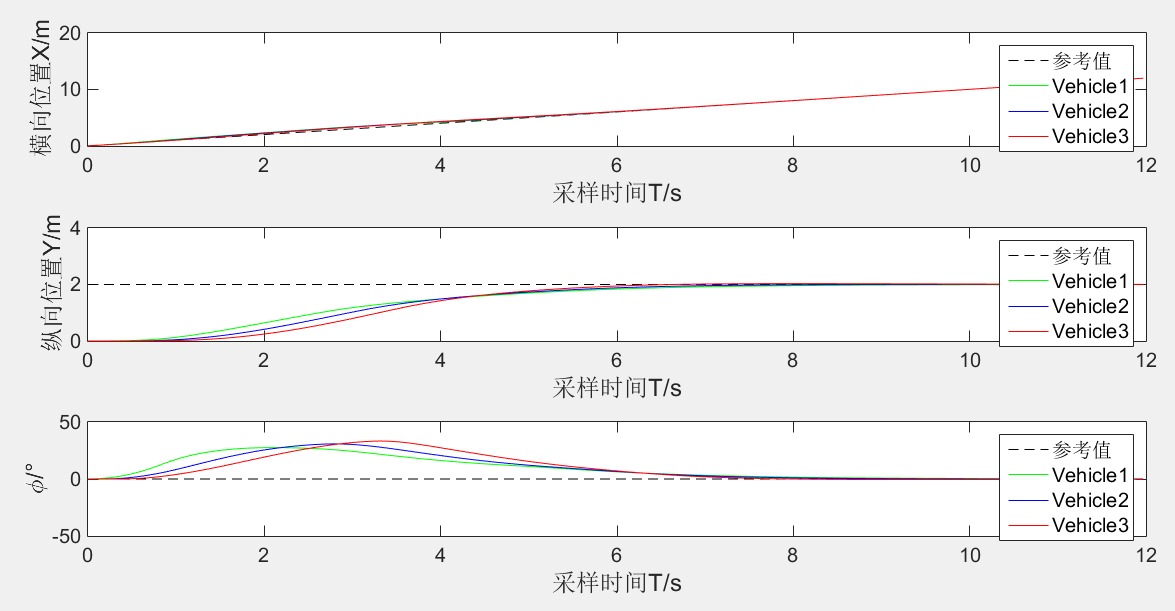
3.5.2 仿真分析 27
3.6 本章小结 33
第4章 基于动力学模型的异构车辆协同控制 34
4.1 动力学模型适用工况及编队形式 34
4.2 车辆动力学建模 36
4.3 动力学线性时变预测模型 41
4.4 基于动力学模型的协同控制器设计 43
4.4.1 目标函数设计 43
4.4.2 约束条件设计 45
4.5 仿真验证与分析 47
4.5.1 车辆参数与仿真工况设置 47
4.5.2 仿真分析 49
4.6 本章小结 59
第5章 结论与展望 61
5.1 结论 61
5.2 展望 62
参考文献 63
致谢 67
附录A MATLAB编程 68
第1章 绪论
1.1课题背景及研究意义
1.1.1课题背景
众所周知,汽车的电动化和智能化是目前汽车行业发展的主流趋势。尤其是进入新世纪以来,新时代科学技术的发展和人们对科技时尚的追求,导致对于车辆的智能化控制需求变得多样且必要。作为如今人类的日常生活必需品,人们希望车辆实现的功能可以更多,控制形式可以更方便,进而催生出无人驾驶车辆的热潮。与之相对应的,是汽车行业的技术人员在工业过程中对控制系统的要求也越来越高,希望控制系统能通过不断优化和改进,从而获得更优异的性能,以实现人们对无人驾驶车辆控制的高需求和高要求。
而纵观工业控制领域的发展,可以发现模型预测控制(model predict control,MPC)作为先进的控制技术之一,自问世至今40余年的发展与应用过程中,在各类工业控制领域均取得了一定成效。尤其是面向有优化需求的控制系统时,相较于其他控制算法,能更方便地处理系统的约束条件,充分表现出了它在解决各类复杂优化控制问题中的巨大潜能。也正因如此,模型预测控制在近年来逐渐进入了航空航天、无人驾驶、先进制造等高新科技领域的应用中,例如飞行器的轨迹控制,卫星姿态控制,电动汽车节能控制,材料制造加工控制等,不再局限于传统的工业过程控制,这也反映了人们对新时代自动控制技术的重视程度,促进了模型预测控制的迅速发展。本文就主要探讨了模型预测控制在无人驾驶车辆的运动规划和控制算法研究中的应用。
无人驾驶车辆的控制作为一个复杂的带各类约束(运动学约束、动力学约束、路况约束等)的控制系统,对控制器设计的实时性要求也是非常高的,一旦控制系统的处理速度跟不上行驶过程的数据刷新需求,就会导致难以想象的灾难性后果。尤其是本文重点研究的车辆间协同控制系统,安全性问题更值得关注,而队列系统的数据量相对于单一无人驾驶车辆倍增,这就使得优化问题的计算规模也大大增加,常用的集中式整体求解方法若是要同时满足上述要求,需要计算机有极高的运算处理速度,对硬件性能要求非常高。因此为了考虑成本和工作效率,本文将采用分布式模型预测控制(Distributed Model Predictive Control,DMPC),对于车辆队列间的协同控制网络这种复杂而高维的控制系统,就可以将其整体求解问题分解成多个子系统(单一车辆间)的分布求解问题,同时各个子系统之间再通过特定的联络方式,完成实时通讯与信息交互,从而降低了问题的规模和复杂性,并从各方面提高了系统的控制性能。
交通是人类社会生活与发展必不可少的一个部分,汽车作为最重要的交通方式之一,其市场拥有率日渐提高,公路系统也随之高速发展。然而带来巨大效益的同时,交通的拥堵、安全事故甚至环境污染等问题也日渐严重,例如每年节假日期间全国各地的交通堵塞、天气恶劣时高速公路上引发的车辆连环相撞、行驶效率低下导致的交通污染等。为改善此类状况,就需提高交通系统的通行容量,对公路上众多车辆的行驶轨迹或行驶方式进行合理的调度和安排。因此不仅仅是单一无人驾驶车辆的智能化,交通系统的智能化也是发展的必然趋势,车辆间的协同控制作为智能交通系统(ITS)的重要组成部分,能有效的解决这一类问题,应当引起重视与关注。
1.1.2研究意义
在车辆间协同控制这一复杂的大规模控制系统中,分布式模型预测控制能够很好的发挥其有效处理约束的能力、较高的灵活性和容错性等特点:面对车辆行驶过程中实时变化的路况,基于汽车模型进行不断在线求解,将每一采样时刻的局部最优控制量作用于车辆的下一次驾驶行为。同时将单一车辆间的信息交流作为子系统进行分布式控制,减少了车辆编队系统的运算复杂度,提升了协同控制的实时性和工作效率。而对于现实中的编队协同控制需求,常出现于异构车辆之间,即各自的车型与车辆结构参数各异,分布式控制中各子系统的独立性就能很好地解决这个问题:只需根据车辆参数对各子系统分别建立各自的运动学模型或动力学模型,再对各控制器间建立稳定可靠的通讯网络,就能完成异构车辆间的协同控制。可见对分布式模型预测控制的研究,能有效的应用于无人驾驶车辆的协同控制之中。
车辆间的协同控制,就是在确保了道路交通安全的前提下,充分利用道路的容量,严格控制各车辆的行驶速度与车辆间距,形成单一队列或多队列(单一车道或跨车道)的柔性汽车队列。根据不同的道路状况与行驶工况需求,通过车辆协同控制系统完成车辆间的调度与安排,使其实现有序安全起步、等速编队巡航、变速轨迹跟随、组合安全驶离等多种协同控制。通过在线而及时的精确计算,有效避免人为因素(心理、药物、疾病等)导致的交通事故;降低交通管理和联合控制的复杂性,通过有效的组织提高交通运输容量和通行效率,缓解甚至避免交通拥堵;利用实时求解的最优控制车速和固定车间距进行协同行驶,可有效降低车辆行驶过程中的空气阻力,在此基础上降低能源损耗,减少环境污染。因此车辆间的协同控制作为一种安全、高效且环保的交通运输模式,十分值得提倡和研究。
1.2车辆协同控制的研究现状
有关无人驾驶车辆的研究已经成为了新时代最火热的话题之一,而与此同时,相关的自动驾驶汽车的协同控制问题也在近些年受到热切关注[23]-[29],这也主要是因为车辆队列的协同控制在改善交通运输状况、提高交通效率、提高道路安全性、减少能源消耗,降低环境污染等方面有着巨大潜力[23] [24]。协同控制的主要目标是确保队列内的车辆在一定的行驶规律下,均以设定的车速行驶,同时行驶过程中连续跟随车辆之间保持预设的间距不变[27]-[29]。最早的队列控制可以追溯到十九世纪八十年代美国加州的“PATH”计划,开展了一系列车辆间通信的协同控制实车道路试验,如文献[1]中PATH计划提出后的十年内开发的自动化高速公路系统(AHS)的设计: AHS是一个庞大复杂的系统,车辆可以自动控制。文中详细讲述了AHS的设计和实施方法,同时表明该方面的研究要求执行器和传感器等技术的进步,以及对大型分层混合控制系统的设计,分析,模拟和测试。文中重点介绍多层AHS控制体系结构和一些实现问题,详细讨论了车载控制系统的设计和安全验证以及交通队列控制器的设计。该计划随后也提出了许多有关传感器与执行器、控制结构、非集中式控制、车辆队列控制稳定性等方面的著名论题[27]。
Liu Y [29]在AHS的研究基础上,总结分析了AHS的主要任务之一是增加道路的吞吐量,实现这一目标的一种方法是将同一车道上的车辆组织成排或队列,并开发控制算法,使车辆能够在安全范围内保持其与其邻近车辆之间的最小距离。车辆队列的间距控制是AHS研究的一个重要方向,并且有了大量已发表的研究成果。间隔控制策略总结为两类,如恒定间隔策略和可变间隔(例如恒定时间间隔,CHT)策略。恒定间隔策略意味着期望的车间距离是恒定的,这需要领先车辆的信息来保证线路稳定性。而在CHT政策中,期望的车间距离随车速而变化。如果车辆速度增加,则所需距离相应地增加,反之亦然。从安全的角度考虑,CHT政策是一个比恒定空间政策更合理的解决方案。该文章在此基础上关注了队列控制的稳定性问题,重点讨论自主车辆的协调间距控制,在通讯延迟导致没有车间通信或没有领队车辆的信息的情况下。仅利用车辆本身的状态信息及其测量结果,成功获得临近车辆的信息,新的间距控制策略也是在延迟的约束条件下进行设计的。基于所提出的控制策略,文章考虑暂态间距误差是否沿着一个队列进行放大,然后以车辆系统的延迟时间界限推导出队列的稳定性条件。并利用仿真结果说明了所提出控制方法的有效性和优点。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: