基于单片机的铁路声屏障自动监测系统设计毕业论文
2020-02-13 21:52:35
摘 要
本文主要针对铁路声屏障设计一套基于STM32系列单片机的自动监测系统,结合现代测控技术设计一种结构简单、性能稳定、使用方便的自动监测小车系统。可以完成通过移动终端和自动小车之间的无线通信控制小车运行方向、速度以及工作状态,并通过移动终端软件实时获取小车记录的视频数据。
论文主要研究了串口通信和无线通信的相关原理;机智云开发平台的二次开发和使用;STM32单片机基本原理及其控制系统组成结构;自动监测小车的设计建模以及实际测试。
最后的测试结果表明了对STM32单片机和无线通信的相关研究无错误,对自动悬挂小车的设计和试验完全符合项目既定要求。
关键词:声屏障;自动小车;物联网;机智云;无线通信
Abstract
This article mainly designs an automatic monitoring system based on STM32 series microcontroller for railway sound barrier, The purpose is to design a simple structure, stable performance and convenient use of automatic car detection system based on modern measurement and control technology. It can control the direction, speed and working state of the car through the wireless communication between the mobile terminal and the automatic car, and obtain the video data recorded by the car in real time.
The article mainly studies the principle of serial communication and wireless communication; the basic principle and composition structure of STM32 single chip microcomputer; development and use of jizhiyun development platform; design and modeling of automatic car in practical test system.
The final result shows that there is no error in the related research Research of STM32 Single Chip Computer and Wireless Serial Communication.The design and test of the automatic suspension car fully meet the requirements of the project.
Key Words:Railway sound barrier ;Automatic car;IoT;gitwits; Wireless communications
目录
第1章 绪论 1
1.1研究背景 1
1.2研究的目的和意义 1
1.3研究的预期目标 2
第2章 声屏障自动监测系统总体方案设计 3
2.1总体方案 3
2.1.1 需求分析 3
2.1.2 总体结构分析 3
2.2 通信系统的设计 4
2.2.1 串口通信的基本原理 4
2.2.2 无线通信模块的原理及配置 6
2.2.3 无线通信电路的设计 6
2.2.4 4G传输模块介绍 7
第3章 声屏障自动监测系统软件设计 8
3.1 上位机软件设计 8
3.1.1 机智云平台介绍 8
3.1.2 机智云软件开发流程 9
3.1.3 机智云软件相关通信协议 13
3.2下位机软件设计 14
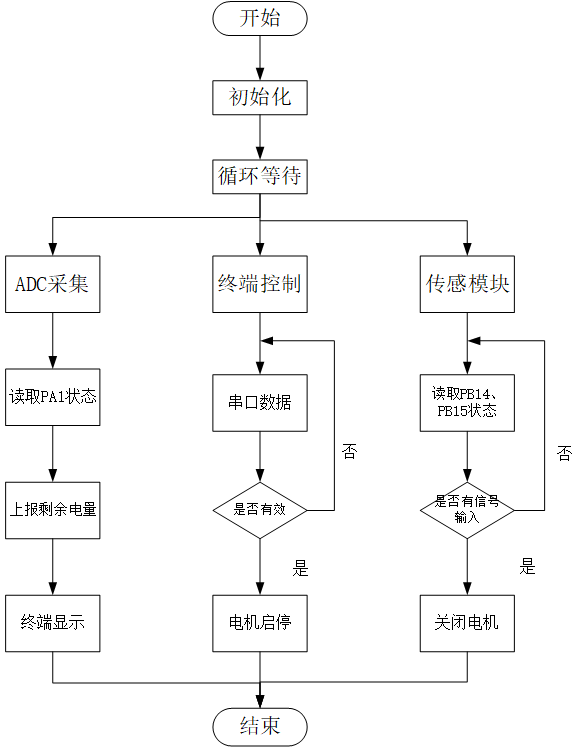
3.2.1 主程序总体流程 15
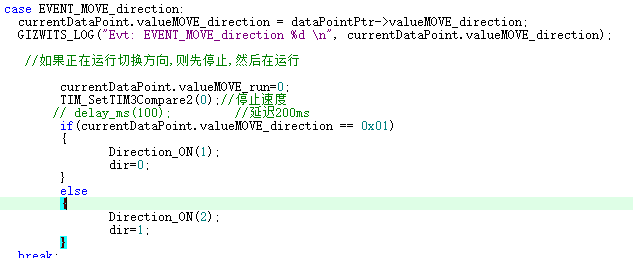
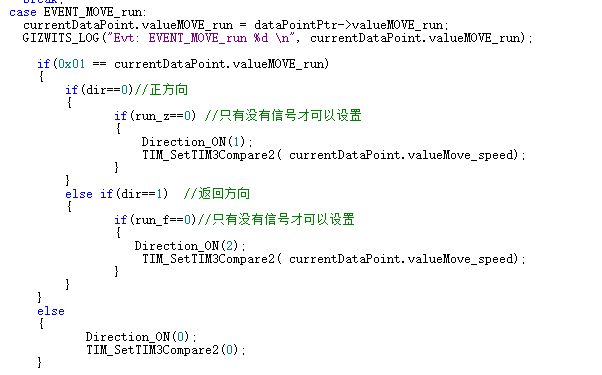
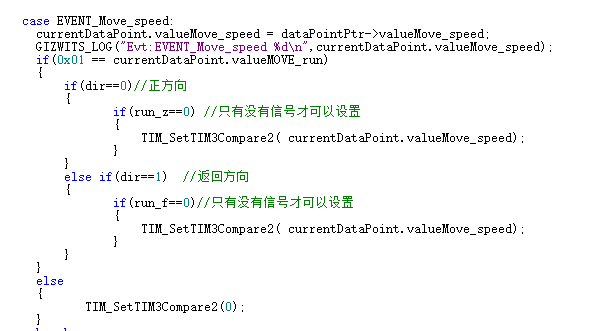
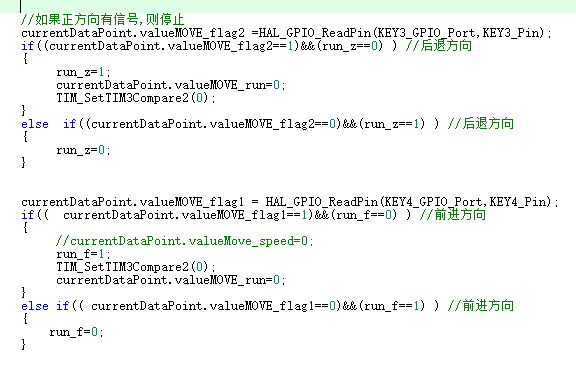
3.2.2 电机控制程序 15
3.2.3 避障程序 17
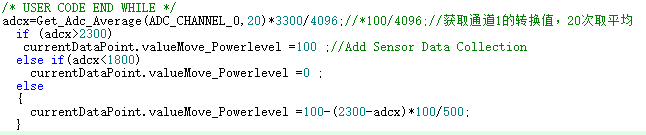
3.2.4 设备电量查询程序 17
第4章 声屏障自动监测系统硬件设计 18
4.1单片机选型 18
4.2 最小系统的设计 19
4.2.1电源电路 19
4.2.2 复位电路 19
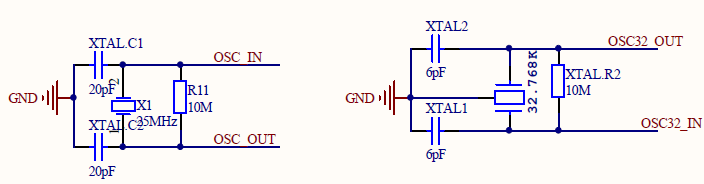
4.2.3 时钟电路 20
4.2.4 调试接口电路 20
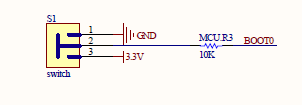
4.2.5 启动模式电路 20
4.3 激光传感模块介绍 21
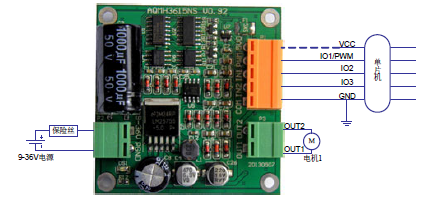
4.4 电机模块介绍 22
4.5 摄像模块介绍 23
4.6 电源模块介绍 23
4.7小车整体结构设计 24
4.7.1支架和导轨介绍 24
4.7.2小车整体效果图 24
第5章 系统调试及结果 25
5.1 自动监测小车实际测试介绍 25
第6章 总结与展望 29
6.1 全文总结 29
6.2 不足与展望 29
参考文献 30
致谢 31
第1章 绪论
城市建设发展飞快,在高速、公路、高架桥车辆越来越多的情况下,为了降低噪音对人们生活休息的严重影响,隔音声屏障势必增多,与此同时隔音声屏障的维护保养也会变的越来越多。隔音声屏障的不及时维护对往来车辆会造成安全隐患,而隔音声屏障安装的位置对保养员的安全作业也存在一定风险。用机器进行远程监测及早发现问题变得尤为重要。由此可见,声屏障自动监测系统必将发挥重要作用,带来更多经济效益和社会效益,市场前景非常可观。
1.1研究背景
当前,随着我国经济快速发展,随着我国经济的快速发展,公路铁路基础设施在建设和使用方面也取得了长足的进步,同时,发展带来的噪声污染也日益严重。目前国内交通干道两侧,噪音污染一般达到75dB以上,最高可以达到130dB左右[1]。在中国城际铁路常见的350KM/H级别高速动车组在运行过程,在其车头处的噪音最大,大约在120dB左右,列车中间的噪音大约为114dB左右,车尾处的噪音大约在116db左右[2],虽然城际铁路距离居民住宿区有一定的距离,但城铁依旧会给沿路居民带来噪音并影响他们的生活,60dB以上的声音对于人耳来说是吵闹的程度,声音达到90dB以上就会造成听力受损,因此隔音屏障的使用成为降低噪音干扰的必要手段,噪音污染已成为社会各界普遍关注的问题。我国在声屏障防噪设施研究领域成就显著,研发和应用了多类防噪隔离设施,有艺术隔音隔离墙、混合隔音隔离墙、复式隔音隔离墙、生态声屏障、插板式单元声屏障等一系列新型防噪设施[3]。这一系列的新型设施在充分发挥其效益的同时,其维护和保养的重要性也日趋显现。众所周知,铁路声屏障都安装在铁路旁,可是声屏障的变形、破损、脱落存在着时间上的不确定性,而为了保证检修人员的安全,一般只能在火车停运时候进行检测,声屏障的维护保养不及时可能就会为后期火车的安全运行埋下隐患。如何才能既不影响火车运行又能保证检修人员安全同时又能对安全隐患提早发现呢?声屏障监测工装设备的出现解决了这一难题。
1.2研究的目的和意义
本文旨在基于STM32单片机设计一套声屏障自动监测设备,主要应用于公路、铁路高架声屏障变形、破损、脱落以及紧固螺钉松动等各项监测项目,通过设计一款自动运行悬挂小车,对声屏障一侧的表面状况进行自动监测并获取视频录像,在项目后期可以对视频图像进行数据处理和特征信息自动识别和定位,将大大减少人力和提高效率。此次课题研究主要方向是对声屏障进行自动监测,主要目的是通过设计一套可远程控制的自动运行设备及时获取声屏障状况信息,并在实际运用中对铁路插板式隔音声屏障的自动监测设备进行设计,针对铁路插板式隔音声屏障的外形特点和工艺性能制作实物进行实地测试。
1.3研究的预期目标
本设计中应该要实现的功能是:通过终端控制自动悬挂小车对铁路声屏障墙体侧面进行监控和巡检,并通过终端接收实时监控视频数据。
所以本次设计的预期目标是,通过在移动终端上的APP软件来发送数据,对自动小车的运行状态进行控制,并且能够通过显示终端软件实时预览和回放由摄像模块获取的视频数据。
第2章 声屏障自动监测系统总体方案设计
本章将从总体设计需求来分析,声屏障自动监测小车所需要的功能模块,在满足功能要求和性能的同时保证系统稳定运行。
2.1总体方案
2.1.1 需求分析
根据实际调查分析,随着声屏障的大面积投入使用,由于设计年限和结构老化等问题,声屏障在发挥实际效益的同时,也会带来严重的安全隐患,比如墙体表面脱落、支撑架螺钉松动等情况,而人为的进行定期检修又会耗费大量的人力物力,且容易造成疏漏,这就要求有一套能够自动识别检测声屏障破损情况的设备来代替人工巡检,保障声屏障在发挥效益的同时不会对交通系统造成不良后果。
根据实际使用需求,此次设计要求采用无线移动视频监控设备的形式,设备要求能实现远程启停、速度控制、设备状态显示、障碍识别等功能,具备较长的续航能力和一定的监测识别速度,可以远程传输视频数据以及进行本地回放,以便后期进行视频的识别分析和危险地点的标记。设备设计要求能清晰地获取声屏障墙体表面状况图像,有效覆盖整个墙体侧面,并且能通过调节摄像头角度实现声屏障两侧警戒巡逻。
2.1.2 总体结构分析
根据上述需求分析和声屏障实际形状特点,设备采用能在固定导轨上稳定运行的悬挂视频监测小车结构。设备设计有远程控制功能,使用机智云开发平台二次开发实现对自动监测小车的远程控制。设备前后两端搭载了激光传感器模块,能实现自动避障,避免设备损坏。设备装载有WiFi和4G模块,摄像模块自带存储功能,可以远程传输视频数据以及进行本地回放,设备硬件总体采用24V锂电池供电,并设计有实时电量显示功能。
为了实现预期功能,整个设计主要分为小车运动控制系统和摄像系统两大部分,控制系统从输入量开始,输入信号有三种,一是机智云SDK端应用将控制信息按传输协议通过网络由云端转发GAgent端,GAgent端再通过串口2将指令发送给MCU;二是激光传感器识别障碍后光电开关给MCU端相应的GPIO口发送开关信号;三是电量采集模块将分压后的电压信号输入到对应GPIO口。
控制系统的输出为驱动电机模块,根据输入信号经过MCU处理后执行相应控制指令。
控制系统结构框图如下:
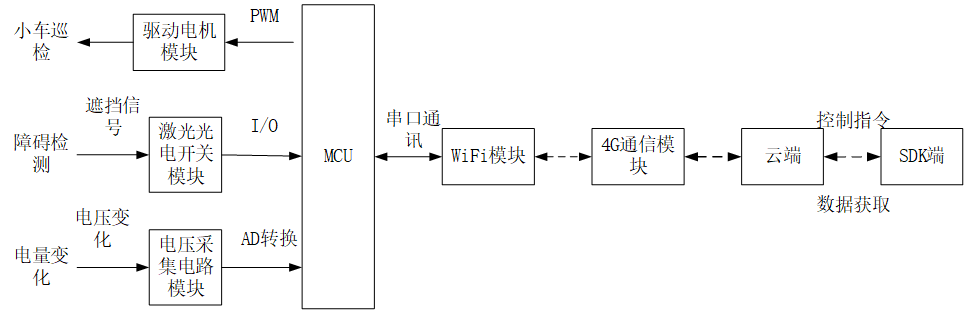
图2.1 控制系统结构框图
摄像系统拟采用工业级网络摄像机,通过自动监测小车无线传输模块将视频数据传送到显示终端,视频显示可以通过萤石云客户端实时远程查看;同时,摄像系统内部自带存储卡,支持视频本地保存和回放,以便后期进行图像的分析识别和安全隐患地点定位。
2.2 通信系统的设计
2.2.1 串口通信的基本原理
处理器与外部设备有两种通信方式,并行通信和串行通信。串行通信按照数据传送的方向可以分为:单工通信;半双工通信;全双工通信。其中,单工通信即数据传输只支持在一个方向上的传输,例如有A和B两台设备,单工通信只能从A到B通信,或者B到A通信,总之就是只能在一个方向上通信,不能实现双向通信。半双工通信支持数据在两个方向上传输,同样是A,B两台设备,半双工通信就能实现A和B之间的互相通信,但是不能同时相互通信。全双工通信可以在同一时间从两个方向上进行数据传输。
串行通信按照时钟同步信号可以分为同步通信和异步通信。其中,同步通信即两个设备之间的数据通信要求有严格一致的时钟同步信号,如SPI,IIC通信接口就是同步通信,同步通信一般用于一个系统中内部设备的相互通信,因为要求要有一致的时钟同步信号,不同系统间的通信容易产生错误。所以在不同系统间的通信方式一般为异步通信,异步通信即不带时钟同步信号,即两台设备间的通信格式不要求有时钟信号,例如UART,单总线等,这对于在有不同时钟源的系统间进行通信是很关键的。
UART接口的特点有:
- 支持半双工、全双工异步通信;
- 拥有小数波特率发生系统,可以提供精确的波特率;
- 可配置的16倍过采样,可为速度容差与时钟容差提供灵活配置;
- 可编程的8位或9位数据字长度;
- 可配置的1或者2位停止位停止位;
- 可配置的使用DMA多缓冲器通信;
- 单独的发送器和接收器使能位;
- 多个带标志的中断源,触发中断;
- 校验控制,4个错误检测标志。
在SMT32中串口通信的过程如下:
- 数据接收过程:外部设备的串行数据通过RXD引脚输入到串行输入移位寄存器中,待输入完成后再由串行输入移位寄存器将数据一次性的输入到输入数据缓冲器中,再由MCU内核读取输入数据缓冲器中的数据。
- 数据发送过程:首先有MCU内核将要发送的数据输入到输出数据缓冲器中,带输入完成后,输出数据缓冲器再将数据一次性的输入到串行输出移位寄存器中,最后由TXD引脚将串行数据输出到外部设备。
异步串口通信要求有严格的数据格式,只有数据格式相同的两台设备才能够相互进行相互通信。异步串口通信的数据格式需要定义的参数有如下几个:
- 起始位。即一组数据的开头,比如约定好A和B之间通信,起始位的电平是0,在空闲状态下通信线上的电平是1,当设备检测到电平从1变为0就表示要开始传输数据了。
- 数据位(8位或者9位)。9位的数据位是带有奇偶校验位,正常数据位只有8位。当起始位结束后就是数据位,设备读取的内容就是数据位中的内容。
- 奇偶校验位(第9位)。对传输的内容是否出错的一种检查方式,比如采取偶校验,在8位的数据中1的数量为偶数个,那么再奇偶校验位中就补0,保证8位数据加奇偶校验位中1的个数是偶数,同理可以奇校验的方法。
- 停止位。事先约定好比如停止位是1,当前面的数据传输完成后,设备检测到一定时间的1就表示这一组数据传输完成,准备开始进行下一组数据的传输。
- 波特率。需要在数据传输之前设置,它是UART的传送速率,用于说明数据传送的速度。在串行通信中,数据一般以位进行传输,波特率作为传送速度单位,表示每秒传输数据位的个数。波特率9600的意思就是每秒传输9600位数据。
此次设计采用了CP2102GMR转换芯片,串口1作为设备下载调试使用,TXD、RXD分别接PA9、PA10,波特率为115200;设备与移动终端之间通讯通过WiFi 4G模组实现,MCU通过串口2与ESP-8266WIFI模组连接,TXD、RXD分别接PA2、PA3,波特率为9600,8位数据,无奇偶校验。MCU与WiFi模块之间通讯遵循《机智云接入串口通讯协议》,指令由包头(2B,0xFFFF)、包长度(2B)、命令(1B)、包序号(1B)、Flags(2B)、有效负载以及校验和(1B)组成,约定包头固定为0xFFFF,包长度是指从命令开始一直到校验和的字节长度。调试串口电路如图2.2。
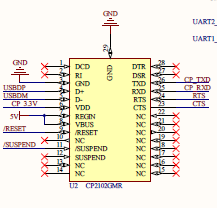
图2.2 调试串口电路图
2.2.2 无线通信模块的原理及配置
由于设计要求是无线通信,所以就不能直接将两台设备的RXD、TXD口相连接,同时,还需要将设备联网加入云端,这就需要用WiFi或4G模块来代替数据线进行数据的传输。在本设计中我选用的无线通信模块为ESP-8266WIFI模组。
ESP8266芯片是一款常见的串口转无线模芯片,可以下载机智云固件,使设备能与云端和GAgent客户端连接,专为移动设备、可穿戴电子设备和物联网应用而设计,具有低功耗、操作相对简单、无需自行编写时序信号等特点。使用串口进行数据收发的无线数传模块,其传输距离远,高速率,全双工。性能稳定,工作温度范围大,能够满足各种操作环境。芯片内部高度集成,ESP-8266集成了32位Tensilica处理器、标准数字外设接口、射频balun等模块,可以降低所占PCB空间。 ESP8266 特性:
(1)内置低功耗32位CPU,可以兼作应用处理器。
(2)内置10 bit高精度ADC。
(3)内置TCP/IP协议栈。
(4)内置TR开关、balun、LNA、功率放大器和匹配网络、内置PLL、稳压器。
(5)支持天线分集、WiFi @ 2.4 GHz,支持 WPA/WPA2 安全模式。
(6)支持Smart Config功能(包括Android和iOS设备)。
(7)在睡眠状态下保持电流为10 uA左右,关断电流小于5 uA、可在2 ms之内唤醒。
2.2.3 无线通信电路的设计
无线通信模块ESP8266的RXD引脚连接到单片机上的TXD引脚,即PA2;ESP8266的TXD引脚连接到单片机上的RXD引脚,即PA3; VCC连接到3.3V电源;GND引脚接地。电路连接如图2.3。
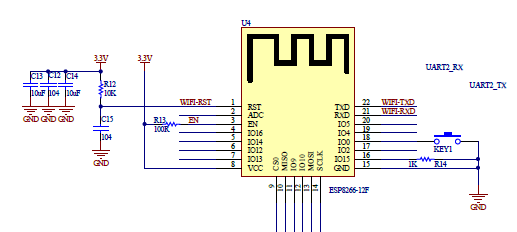
图2.3 无线通信模块电路图
2.2.4 4G传输模块介绍
机智云GAgent模块和网络摄像机端WiFi模块需要将数据上传云端,才能和相应的终端SDK通信,因此,实现云端和设备端连接的通信模块必不可少。此次设计采用工业级4G模块AF760,该模块支持4G/3G/2G WiFi无线接入,4G传输速度最高可达150Mbps,最高可以支持8个用户接入WiFi热点。模块采用DC12V供电,最大功耗小于2.5W,具备低功耗、性能稳定等特点。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: