基于轮毂电机的电动汽车横摆稳定性控制方法研究毕业论文
2020-02-17 10:56:17
摘 要
本文从改善电动汽车的横摆稳定性角度出发,以轮毂电机的电动汽车为研究对象,对其附加横摆转矩优化理论、分配方式进行了研究。主要进行车辆动力学建模、魔术公式轮胎模型的搭建、车辆横摆力矩分配算法的的确定以及车辆稳定性控制器的建立等相关工作。
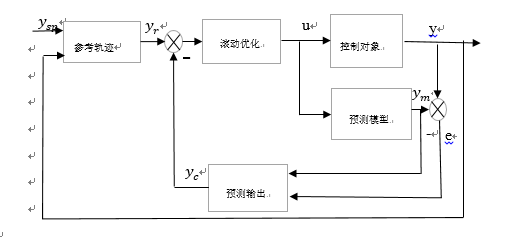
在模型搭建完成的基础上,本文主要研究了车辆稳定性控制策略及分配方法开发。整个控制策略选择使用分层控制结构形式,分为上下两层控制器。其中,在上层控制器中把横摆角速度和质心侧偏角作为状态控制变量,选择使用线性二自由度车辆模型作为参考模型,将整车模型与参考模型输出的差异变化率作为控制器的输入,然后采用模型预测控制理论,预测车辆的状态变量与期望状态之间的差异,从而计算出为了保证车辆稳定性控制所需的附加横摆力矩和附加前轮转角;将参考模型与七自由度之间的目标参数(横摆角速度和质心侧偏角)的差值通过控制器转化为车辆所需要的横摆力矩。下层控制器将得到的附加横摆力矩基于约束合理分配,作用于轮毂电机。
研究结果表明在控制前后电动汽车的横摆稳定性明显改善,更加接近期望值,系统的鲁棒性大大提高。
本文的研究特点主要有以下两个方面:一方面是采用模型预测控制理论的控制方法对预测模型进行仿真分析,可以充分利用其优点和特点,使得控制策略更加合理;另一方面是结果分析采用对比的形式,在不同地面附着系数以及不同转角输入的条件下验证车辆横摆稳定性控制策略的有效性。
关键词:横摆稳定性;轮毂电机;预测模型优化理论;直接横摆力矩
Abstrarst
From the angle of improving the yaw stability of electric vehicles, this paper studies the theory and distribution method of additional yaw torque optimization for electric vehicles with hub motors. doing some related work such as vehicle dynamics modeling, magic formula tire model building, determination of vehicle yaw moment allocation algorithm and establishment of vehicle stability controller.
Based on the completion of the model, this paper mainly studies the development of vehicle stability control strategy and distribution method. The whole control strategy adopts hierarchical control structure, which is divided into upper and lower controllers. In the upper controller, yaw rate and sideslip angle of the center of mass are taken as state control variables, the linear two-degree-of-freedom vehicle model is chosen as reference model, and the difference rate between the output of the whole vehicle model and the reference model is taken as input of the controller. Then, the model predictive control theory is used to predict the difference between the state variables of the vehicle and the expected state, so as to calculate the difference between the state variables of the vehicle and the expected state. The additional yaw moment and the additional front wheel rotation angle required for vehicle stability control are obtained. The difference between the reference model and the target parameters (yaw angular velocity and sideslip angle of the center of mass) is transformed into the yaw moment required by the vehicle through the controller. The lower controller distributes the additional yaw moments reasonably based on the constraints and acts on the hub motor.
The results show that the yaw stability of the electric vehicle is improved significantly before and after the control, which is closer to the expected value, and the robustness of the system is greatly improved.
The main characteristics of this paper are as follows: on the one hand, the control method of model predictive control theory is used to simulate and analyze the predictive model, which can make full use of its advantages and characteristics to make the control strategy more reasonable; on the other hand, the result analysis uses the form of comparison to verify the vehicle yaw under the conditions of different ground adhesion coefficient and different angle input. Effectiveness of stability control strategy.
Key Words:Yaw stability; Hub motor; Predictive model optimization theory; Direct yaw moment
目 录
摘 要 I
Abstrarst II
第1章 绪论 1
1.1 课题研究的背景及意义 1
1.2 横摆稳定性控制发展与国内外研究现状 2
1.2.1 横摆稳定性控制国外研究现状 2
1.2.2 横摆稳定性控制国内研究现状 3
1.3 本文的研究内容 4
第2章 四轮驱动轮毂电机电动汽车建模 6
2.1 车辆动力学模型整体架构 6
2.1.1 车辆模型坐标系定义 6
2.1.2 模型假设 7
2.1.3 整体架构 7
2.2 电动汽车理论模型 8
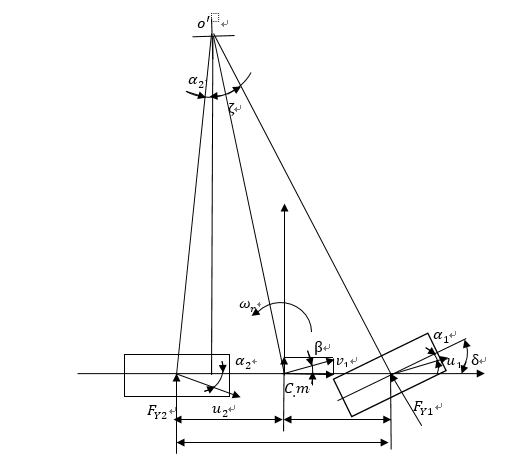
2.2.1 车辆动力学模型 8
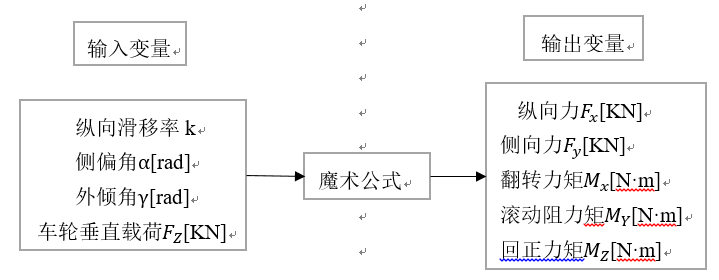
2.2.2 魔术公式轮胎模型 10
2.2.3 线性二自由度车辆参考模型 13
2.2.4 电机模型 14
2.2.5 轮毂电机功率的选择 15
2.2.6 轮胎模型和整车动力模型的联结 15
2.3 本章小结 17
第3章 模型预测控制 18
3.1 MPC基本原理 18
3.2 MPC特点 19
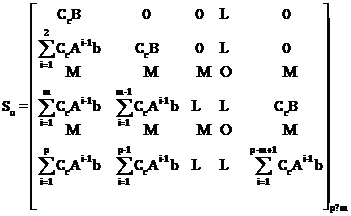
3.3 状态空间方程预测控制 20
3.4 本章小结 22
第4章 横摆稳定性综合控制方法研究 23
4.1 上层控制算法研究 23
4.1.1 模型预测控制器 24
4.1.2 约束优化问题 25
4.2 下层控制算法研究 28
4.2.1 附加横摆力矩约束条件 29
4.2.2 控制分配算法 30
4.3 本章小结 31
第5章 基于MATLAB/Simulink模型搭建与系统仿真分析 32
5.1 Simulink基本介绍 32
5.2 二自由度汽车模型仿真 33
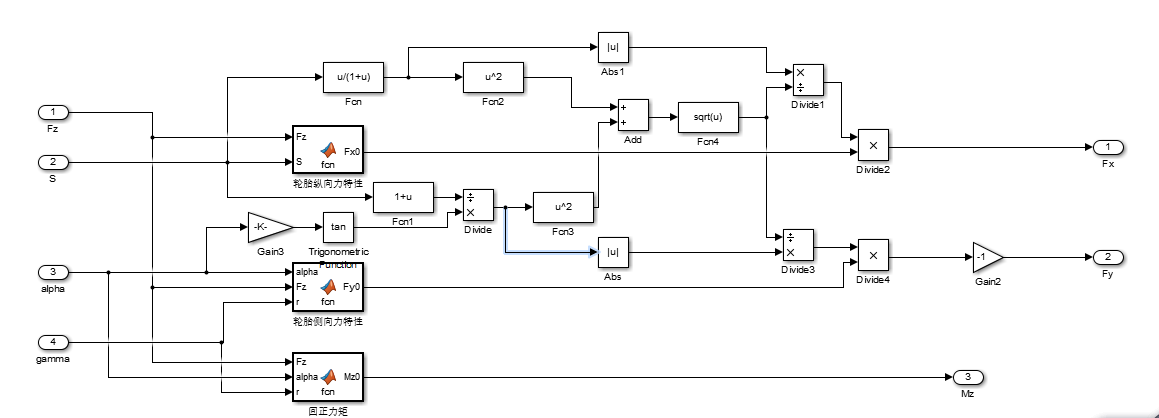
5.3 魔术公式轮胎模型仿真 34
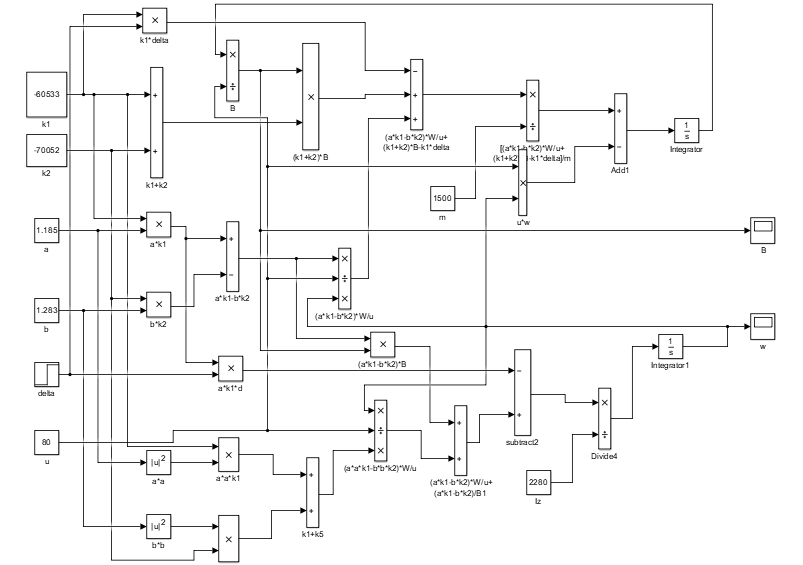
5.4 七自由度整车模型仿真 36
5.5 控制策略方法编程 38
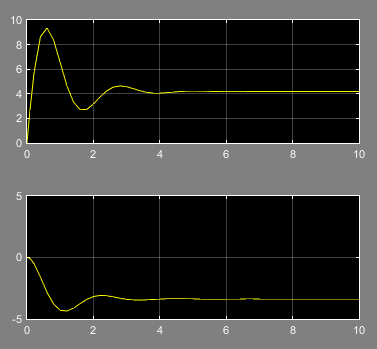
5.6 汽车横摆稳定性仿真分析 40
5.7 本章小结 43
第6章 全文总结与展望 45
6.1 全文总结 45
6.2 展望 45
参考文献 47
致 谢 49
第1章 绪论
1.1 课题研究的背景及意义
内燃机汽车从发明到量化生产,逐步实现了一步又一步大的跨越,从单独的机器使用到机械与电器相结合逐步满足自动化的要求,并且随着高科技的产生与发展,汽车发展又出现了飞跃,在主动安全性、操纵稳定性、节能环保型、横摆稳定性、乘坐舒适和生产制造成本等功能性性能方面取得了历史性的跨跃。随着人们对生活质量要求的不断提高,对环境也提出了更高的要求,追求更加生态化;然而由于汽车的内燃机把石油作为燃料,石油在内燃机内的不充分的燃烧会产生二氧化硫等有毒气体或者引起温室效应,因此内燃机面对的形势和挑战,无论是在环境方面还是能源方面,都存在着很大的缺陷。各种非再生资源比如碳、石油、天然气会变得越来越少,甚至不能满足人们的日常需求,我们需要的是转换资源,寻找新的可再生资源作为汽车的新能源、新动力。伴随着内燃机汽车的运用广泛与迅速推广,,人们对于由于内燃机引起的污染认知还是存在不足,应该把汽车引起的污染提上人们思想进程。同时还应该注重新能源的开发,虽然氢气等能源污染较小,但是其生产困难,不能够实现大批量生产,所以不能够取代那些不可再生资源;然而如果追根溯源,会发现人们日常使用的电力会是一种全新能源,并且电力的来源有比较环保的方式,同时人们对于电力的使用以及如何提高电力利用率拥有较为丰富的经验并处于不断地丰富和发展过程中。随着时代的发展,电能占有着越来越重要的作用,它有可能会代替传统燃料转为各种交通工具的重要能源和战略资源,所以电动汽车的发展代替传统汽车是交通运输工业发展的必然趋势,只是现在刚刚开始而已。因为提高人们的认知是一个非常重要的方面。电能用于汽车,是通过燃料电池的作用来实现的,所以要主要提高燃料电池的利用率。燃料电池的工作原理是直接将燃料的化学能通过化学反应转变为电能,其利用率是燃料的发电效率的一倍左右,并且不会由污染性气体的排放,因而不会 对大气造成污染。因此纯电动汽车在汽车市场上的需求会越来越大甚至成为主流。基于轮毂电机的纯电动汽车省略了大量传动部件,节省安装空间,让车辆结构更简单,提高系统效率。传统汽车大都是由一些必备的汽车部件比如离合器、变速器、传动轴以及差速器组成的,虽然这些零件对于汽车有着十分重要的作用,但是,不可否认的是,这些零件在做出巨大贡献的同时,也在无形中带来了一些缺陷,比如车辆结构过于复杂,而且既然是机械,就会存在定期维护和发生故障损坏等问题;而且其驱动形式越复杂,那么与之带来的结构就越难。但是,电动汽车通过采用不同数量的轮毂电机能够轻易地实现多种复杂的驱动形式。并且轮毂电机有独立控制的作用,所以我们可以通过一定的控制策略来实现汽车不同轮胎的不同车速,目的是为了满足功能性要求。并且对于差动助力转向或者其他类型的助力转向,能够使车辆操纵更加方便,是现在多种工况下行驶等方面都具有不可比拟的优势,比如能够实现原地转向;另外它还能够很好的和目前最前沿的新能源技术融合,无论是什么车型,都能够轻易地站在科技时代的前沿,因为轮毂电机可以作为非传统汽车的主要驱动力,这些优点使得轮毂电机电动汽车更加主动化和智能化以及便于实现。
汽车的重要性能之一是主动安全性,并且操纵稳定性也直接影响着汽车的主动安全性.传统汽车通过一系列的操控系统实现车辆稳定性要求,然后利用差动制动的方式实现直接横摆力矩控制(Direct Yaw-moment Control, DYC)通过直接横摆力矩的控制来完善整车系统的动力学性能,使得车辆的稳定性和安全性更加趋于完善,但是在操作过程中由于驾驶人员要运用制动系统来实现车速的控制,但是这样的设置在很大程度上会影响驾驶人的行车感受,对于心里不好的人来说,甚至引发交通事故,或者出现猛刹等影响车辆性能的状况。对于存在轮毂电机驱动的电动汽车而言,可以利用其各个车轮的力矩通过轮毂电机以及控制策略来实现每个车轮的独立控制,并且不需要驾驶员的直接介入,对于实现车辆的直接横摆力矩控制更加简便。
1.2 横摆稳定性控制发展与国内外研究现状
1.2.1 横摆稳定性控制国外研究现状
车辆动力学由横向动力学、纵向动力学以及本身的横摆运动。其中,对于车辆稳定性因素影响最大的时车辆的横向动力学,同样汽车的横摆稳定性对于汽车的横向运动的影响也十分巨大。
日本东京农工大学47[1] Masao Nagai 在2002年提出了一种针对汽车稳定性的控制策略,即将主动前轮转向和直接横摆力矩集成控制策略,运用模块匹配控制的方法,对期望横摆角速度和期望质心侧偏角期进行跟随和模拟分析,然后对于计算分析由优化目标得到的附加制动力矩根据控制优化理论设计两种补偿器(分别是前馈补偿器和反馈补偿器) 进行补偿,然后利用补偿结果计算控制所需的期望状态变量,同时和直接横摆力矩控制所得到的状态量相比,体现出该策略的优势与差异。利用主动前轮转向和直接横摆力矩控制的综合控制策略相比另一种控制策略进一步可以提高车辆的横摆稳定稳定性,并在特定难以行驶的条件下具有较强的平顺性,能满足车辆的稳定性要求。
Cho W 等[2]人在2012年设计了一个新型控制策略系统,采用的是分层控制策略,主要研究主动前轮转向和防滑策略两个方面的联合,分层策略中的上层部分根据选定的参考汽车模型决策出期望的横摆角速度和期望车速,然后对于由计算分析优化目标得到附加制动力矩和期望的纵向力,然后通过下层控制策略协调上层控制器部分产生的期望的附加制动力矩和实际纵向力,然后经过进行模拟仿真实验,检验所选控制策略的有效性以及实车上的合理实用性等功能。
Tahami等[3]人又不同于前文提出的控制策略,同样是对对四轮轮毂电机驱动电动汽车稳定性控制的问题,但是他提出了应用神经网络的思路,把电动汽车前轮的转角和电动汽车速度作为神经网络的输入,通过选定的参考模型输出期望的横摆角速度,将整车模型所需要的实际横摆角速度和参考模型输出的期望横摆角速度的差值变化作为控制器的优化输入,基于控制策略以及上述输出结果设计满足控制要求的模糊控制器,方便直接横摆力矩的策略分配以及转矩控制,取得了很好控制效果。
Abe M 采用不同于其他人的控制策略[4],虽然还是对横摆力矩控制方法的研究,但是它所采用的控制策略却是滑膜控制,对于整车实车运用具有很大的参考意义。其整车模型的搭建和整车控制系统主要是通过线性二自由度参考模型所输出的期望质心侧偏角作为整个控制系统的状态量,接下来对于整车模型而言需要跟踪它的质心侧偏角响应角速度于二自由度模型之间的差异,保证车辆稳定、差值最小。当实验车辆的质心侧偏角的大小处于线性变化时不需要控制器的介入;反之,当受到由于外界或车辆本身条件的变化引起非线性动力特性干扰时,那么这个时候就需要控制策略来维持整车稳定。
1.2.2 横摆稳定性控制国内研究现状
清华大学的晏蔚光等[5]人将线性二自由度车辆模型作为参考模型,同时将其作为研究基础和参考对象。为了能够更好的实现对车辆稳定性的控制,他们在理论的基础上提出了一种将前馈和反馈相结合的复合控制结构。这种控制方式同样是以将直接横摆力矩控制和主动前轮转向为研究定向基础,目的是为了改善汽车的制动稳定性。控制器的控制策略与前文相同,同样是将前轮转向角作为输入,但是在设计过程中考虑外部侧向干扰力和力矩作用,通过前馈校正补偿转向角引起的状态变化;同时建立扰动状态观测器,采用反馈控制校正消除外部扰动引起的状态误差。仿真试验证实这种控制方法在提高制动稳定性方面有良好的效果。
吉林大学陈虹教授课题组[6]同样是对主动前轮转向和直接横摆力矩的综合控制策略方法进行不同控制策略的研究,主要是模型预测控制,文献不同的是是以传统汽车为研究对象,选用传统汽车为参考模型,对于所选用的控制结构采用分层控制方式,其控制方式与前人无异,上层控制器根据车辆维持稳定的实际状态与参考模型期望状态的误差决策优化得到附加前轮转角和附加横摆力矩,然后通过底层控制器通过合理分配的协调策略将附加横摆力矩为维持稳定施加在每一个轮胎上;与上述不同的是,文献不以传统汽车为研究对象,其研究对象是分布式电动汽车,不采用分层控制策略,直接根据为维持稳定的要求根据前轮转角算出附加的横摆力矩,然后由控制目标确定控制策略从而确定出四个车轮的轮胎力,最后要经由实验验证控制策略的有效性,对于该汽车的横摆稳定性具有一定的帮助。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: