智能小车室外简单环境自主导航控制方法研究毕业论文
2020-02-17 10:59:46
摘 要
目前,计算机技术以及人工智能的发展,极大的促进了移动机器人在各个领域的广泛应用,如太空探索、工业制造、军事应用、服务和医学治疗等领域。智能小车属于移动机器人的一种,而移动机器人与其他机器人的不同之处在于其能够“移动”的特征,它能够自主实现感知、规划与控制。
本文针对四轮智能小车定位、自主导航和路径规划问题,建立了四轮智能小车的系统模型,采用多传感器融合方法实现四轮智能小车的自主定位以及利用全局路径规划和局部路径规划分析研究其导航问题。并利用规划出路径进行轨迹跟踪,进而实现智能小车的控制。本文的主要工作如下:
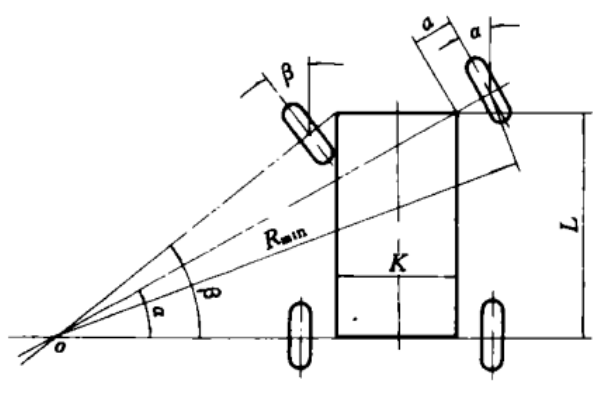
1、针对四轮智能小车,搭建基于阿克曼转角转向的移动机器人平台,为本文算法的实现提供实验基础。
2、由于室外环境的复杂,利用激光传感器进行智能小车的自主定位,针对单纯利用激光里程计的四轮智能小车定位效果差的问题,提出了融合IMU(姿态传感器)和激光里程计的卡尔曼滤波定位算法,该算法由于融合了IMU的数据,有效减轻了航向角误差对四轮智能小车定位精度的影响。
3、针对四轮智能小车相对定位中不可避免存在的误差累计问题,采用AMCL算法,通过与已知地图信息匹配,实现对定位的闭环。
4、针对四轮智能小车利用阿克曼转角转向,单纯利用全局路径规划,实际小车运行存在非完整性约束对运动的影响,如最小转角、四轮智能小车的形状的影响。通过局部路径规划,规划出满足四轮智能小车运动约束的路径,是四轮智能小车更容易地到达目标位置。
5、针对规划出的路径点,对智能小车进行轨迹跟踪,通过计算智能小车当前位置与目标点的偏差,通过调节智能小车的转向与动力输出,进而对智能小车纵向和横向进行控制。
最后,对全文进行总结,并对接下来的研究进行展望。
关键词:四轮智能小车;室外环境;自主导航;激光传感器
Abstract
At present, the development of computer technology and artificial intelligence has greatly promoted the wide application of mobile robots in various fields, such as space exploration, industrial manufacturing, military applications, services and medical treatment.Intelligent car is a kind of mobile robot, and the difference between mobile robot and other robots is that it can "move", and it can independently realize perception, planning and control.
Aiming at the problems of four-wheel intelligent vehicle positioning, autonomous navigation and path planning, the system model of four-wheel intelligent vehicle is established in this paper. The multi-sensor fusion method is adopted to realize the autonomous positioning of four-wheel intelligent vehicle, and the navigation problem is analyzed and studied by using global path planning and local path planning.The path is used to track and control the intelligent car.The main work of this paper is as follows:
1.For four-wheel intelligent vehicle, a mobile robot platform based on ackman corner steering is built to provide experimental basis for the realization of the algorithm in this paper.
2.Due to the complexity of the outdoor environment, the use of laser sensors for smart car independent positioning, for the simple use of laser speedometer four-wheel smart car positioning problem of poor effect, puts forward the integration of IMU (attitude sensor) and the kalman filter positioning algorithm of laser speedometer, due to the integration of innovative marketing data, the algorithm effectively reduces the course Angle error of four-wheel smart car positioning accuracy.
3. Aiming at the inevitable error accumulation in the relative positioning of four-wheel smart car, AMCL algorithm is adopted to realize the closed-loop positioning by matching the known map information.
4. Aiming at the four-wheel smart car using ackman Angle steering and pure global path planning, the actual running of the car has the influence of non-integrity constraints on the movement, such as the influence of the minimum turning Angle and the shape of the four-wheel smart car.Through local path planning, the path satisfying the motion constraint of four-wheel smart car is planned, so that the four-wheel smart car can reach the target position more easily.
5. Track the smart car according to the planned path point, calculate the deviation between the current position of the smart car and the target point, adjust the steering and power output of the smart car, and then control the smart car vertically and horizontally.
Finally, the thesis is summarized and the future research is prospected.
Key Words:Four-wheel intelligent car;Outdoor environment;Autonomous navigation;Laser sensor
目录
摘 要 I
第1章 绪论 1
1.1 研究目的与意义 1
1.2 国内外研究现状 1
1.2.1 基于ROS系统的Racecar竞速移动机器人 1
1.2.2 定位方法 3
1.2.3 路径规划算法 4
1.2.4 轨迹跟踪 5
1.3 主要研究内容 5
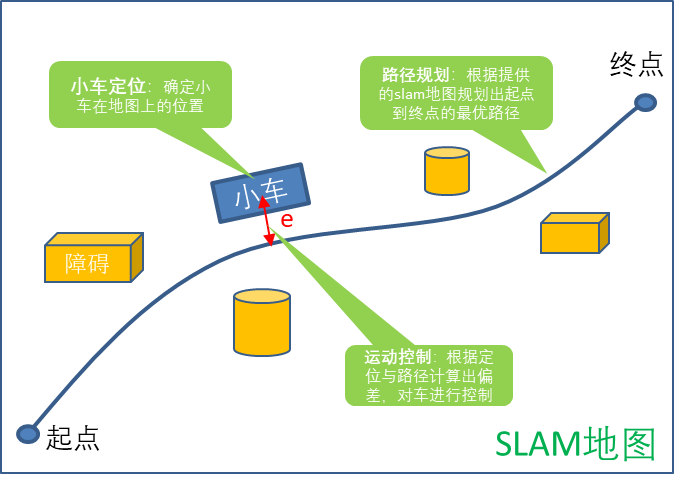
1.3.1 车辆定位(Location) 6
1.3.2 路径规划(Route plan) 6
1.3.3 轨迹跟踪(Trajectory Tracking) 6
第2章 系统方案与实验平台搭建 8
2.1 系统总体方案概述 8
2.2 实验平台搭建 8
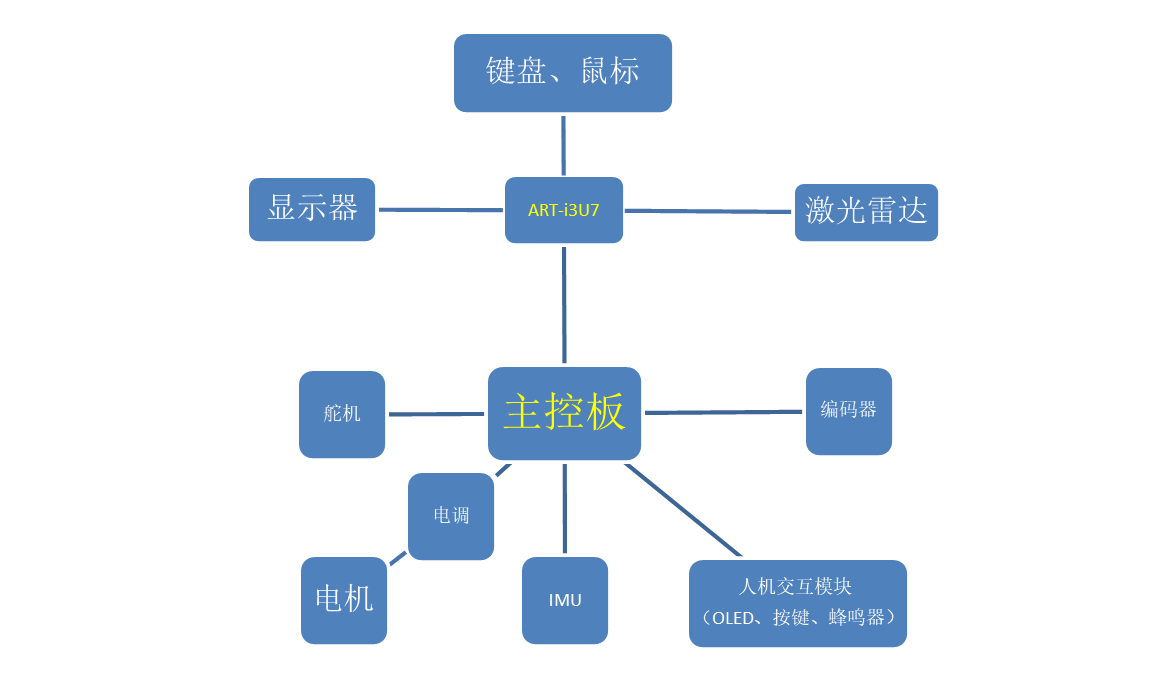
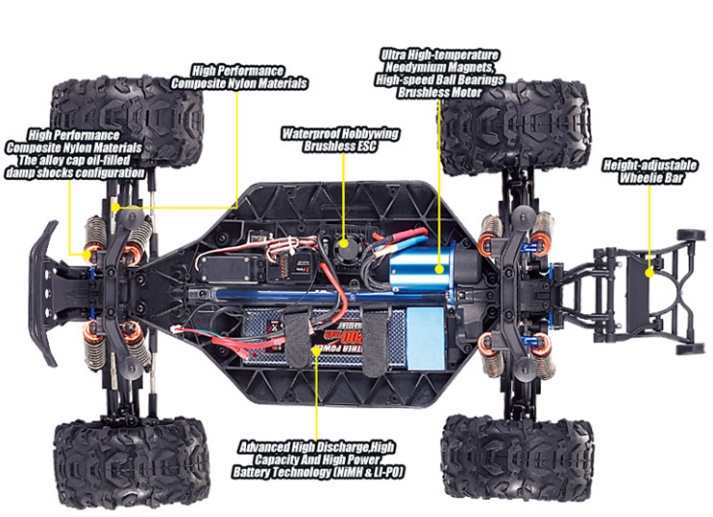
2.2.1 硬件系统 8
2.2.2 软件系统 12
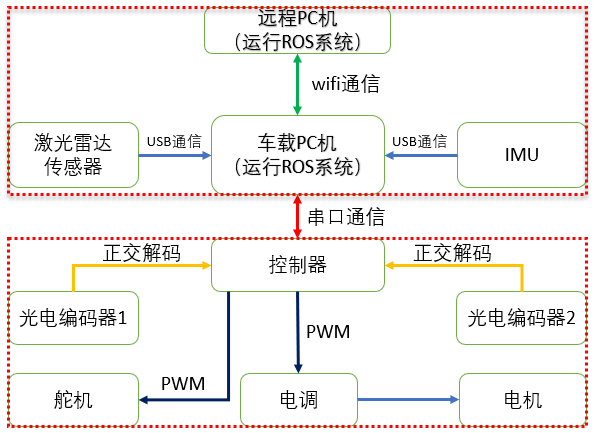
2.3 PC机和控制器通信 13
2.3.1 PC机间通信 13
2.3.2 PC机与控制器间通信 13
2.4 软件操作平台 13
2.4.1 ROS系统的介绍 14
2.4.2 ROS机器人操作系统的特性 15
2.4.3 ROS机器人操作系统通信特点 17
2.4.4 ROS操作系统常用的工具箱 18
2.5 本章小结 19
第3章 基于多传感器融合的定位算法研究 20
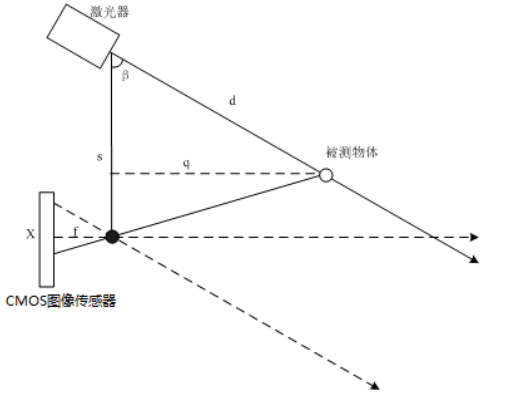
3.1 激光里程计原理介绍 20
3.1.1 基于激光雷达进行二维速度和距离距离估计 20
3.1.2 根据激光里程计的速度估计 22
3.1.3 由粗到细的方案来估计运动 24
3.1.4 激光里程计算法执行 25
3.2 基于卡尔曼滤波算法的多传感器融合定位 26
3.3 AMCL算法 27
3.3.1 AMCL算法的原理 27
3.3.2 AMCL算法与相对定位信息的结合 29
3.4 实验验证 30
3.5 本章小结 32
第4章 智能小车路径规划 33
4.1 路径规划算法概述 33
4.2 全局路径规划 34
4.2.1 常见全局路径规划算法 34
4.2.2 基于Dijkstra算法的全局路径规划算法 35
4.2.3 基于A*算法的全局路径规划算法 37
4.2.4 实验比较 41
4.3 局部路径规划 42
4.3.1 DWA动态避障的局部路径规划算法 42
4.4 实验验证 45
4.5 本章小结 46
第5章 智能小车的轨迹跟踪 48
5.1 转向控制器的研究 48
5.2 速度控制器的设计 49
5.3 控制误差的分析 50
5.4 实验验证 51
5.5 本章小结 52
第6章 总结与展望 53
参考文献 55
致 谢 58
绪论
研究目的与意义
本文研究的四轮智能小车是属于移动机器人的一种,而移动机器人与其他机器人的不同之处在于其能够“移动”的特征,它能够自主实现感知、规划与控制。目前,移动机器人已经大量的应用到人们生活的方方面面,如工业、农业、服务业、军事、医疗等领域中,特别是在繁琐、恶劣甚至是危险的环境中大量应用,使人类可以去从事更高层次的工作。
目前,多数研究主要针对的是室内环境下两轮移动机器人的研究,而本论文则拟针对室外环境下四轮智能小车自主导航进行展开研究。室外环境下相较于室内环境地面条件较差,因此需要四轮智能小车具有良好的机动性,而两轮移动机器人是通过两轮差速实现机器人的运动控制,不适用于较为恶劣的室外环境,而本论文研究的是通过阿克曼转角来实现转向的四轮智能小车室外环境下的自主导航问题,运动模型较为复杂,并且室外环境相对于室内环境较为复杂,本论文要实现四轮智能小车能够在一个已知的室外环境中(已知室外环境的地图信息),能以较小的时间代价到达所指定的目标点。为达到成本较低利于智能四轮小车普及的目的,通过对定位算法的改进及优化,能够仅使用简单的二维激光雷达来实现四轮智能小车的定位以及对环境的感知。
四轮智能小车通过二维激光传感器完成室外环境下的自主导航,实时避障,该研究成果会对室外环境下移动机器人大量应用有极大的促进作用。
国内外研究现状
基于ROS系统的Racecar竞速移动机器人
由于开源的机器人操作系统(ROS)[1]的成功出现,极大的提高了机器人研发过程中的软件复用率。目前对于机器人操作系统,趋于完善的移动机器人的软硬件系统结构促使机器人的研究重点渐渐转移到对移动机器人自身定位与应用方面。本论文也将在成熟的以及开源的ROS操作系统上进行开发,研究利用现有模块,重点分析智能小车的定位与路径规划及轨迹跟踪等问题。
目前基于ROS操作系统来做无人测试平台系列有MIT的RACECAR,MIT大学作也是最早开始做RACECAR的大学,他们的思路主要是使用双目摄像头和激光雷达传感器来实现RACECAR的自主导航。这款赛车平台是基于1/10规模的Traxxis拉力赛车平台和Nvidia Jetson TX1嵌入式超级计算机。车辆使用的传感器有:激光传感器、立体摄像机、深度相机、IMU等,速度可以达到4m/s。

图 1.1 MIT-Racecar
而对于UPENN F1 TENTH的RACECAR外观及部件都与和MIT的RACECAR非常的相似,然而车模上很多东西需自行组装,并且电调模块是需自行焊接。
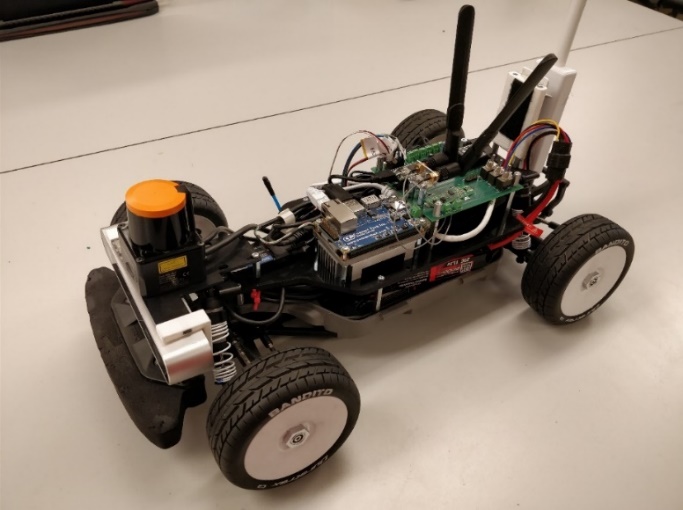
图 1.2 UPENN F1 TENTH的RACECAR
而台湾大学仿照MIT-RACECAR制作了低成本的hypha-racecar。仅利用激光雷达传感器进行定位,搭建一辆车模只需利用600美元就可以搭建,运行速度可以高达3m/s。该racecar利用激光雷达传感器做激光里程计,通过利用卡尔曼滤波融合IMU数据和激光里程计数据,矫正单纯使用激光里程计带来的转向角度的偏差。
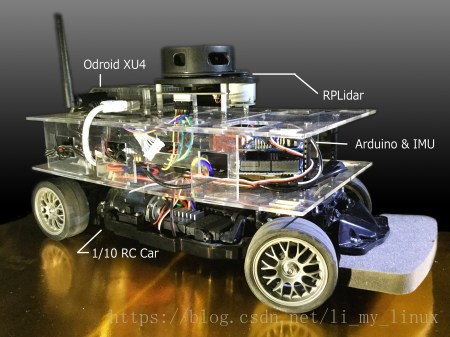
图 .3 hypha-racecar
定位方法
作为研究移动机器人过程中最基本、最关键的问题,移动机器人的定位问题同时也是后续更高级工作任务的基础。定位问题其实是为了能够实时的获得移动机器人在其运行过程中的位姿和状态。定位问题的解决方法可以分为两类:相对定位和绝对定位[2]。
相对定位方法:又称为四轮智能小车的航迹推测[3],通过在移动机器人上安装一些内部传感器,如激光雷达传感器、轮边里程计,陀螺仪和加速度计等,利用这些内部传感器测量单位时间内移动机器人的位姿变化,移动机器人目前的位姿是相对于起始状态逐步推算出来的。相对定位的方法目前主要有里程计定位、惯性传感器定位、视觉里程计、激光里程计等定位方法[4][5]。对于四轮智能小车,安装在轮边的里程计是最常用,也是最简单的一种位置传感器。四轮智能小车的速度与位置是根据单位时间内采集到的编码器数据推算出来的。但在车轮打滑以及路面不平等非系统误差的影响下,推算出来的定位会出现严重的误差。
惯性传感器定位又称为惯性定位,是使用内置的陀螺仪和加速计来实现移动机器人的自主定位。陀螺仪能够测量绕X、Y、Z轴的角速度,而加速度计则能够测量其关于X、Y、Z轴方向上的直线加速度量。因此根据陀螺仪测量的数据可计算出智能小车的姿态以及各轴的角速度,而根据加速计测量的数据可推算出四轮智能小车的位置。由于惯性定位中四轮智能小车的位姿是根据陀螺仪和加速度计测量出的数据积分得到,其并不依赖于外部环境信息,只需要内部传感器自身采集到的数据,适用范围非常广。但不可忽视的是,加速度计与陀螺仪都存在着静态偏差,经过长时间的积分会累积误差并急剧增大。同时,为了能够实现四轮智能小车较高精度的定位,也有一些学者采用多种传感器采集环境信息进行融合,如采用扩展的卡尔曼滤波[7]以及无迹的卡尔曼滤波[8]等信息融合算法。
绝对定位方法:相对于相对定位方法精度更高,但成本往往也会有所增加。主要有GPS、地图匹配、路标与灯塔导航等来确定四轮智能小车的绝对位姿。GPS主要应用在室外环境下,通过与其他相对定位方法达到精确定位,但是在室内环境下不能够使用,同时还受天气、地形等影响。而对于依靠地图匹配算法,目前比较成熟的算法有基于栅格地图的蒙特卡罗定位[9]和基于特征地图的线段匹配定位[10]、11]。在进行地图匹配之前,提前构建智能四轮小车运行的全局地图;而在进行地图匹配时,通过利用安装在车模上的传感器采集到的数据构建局部地图,通过全局与局部地图匹配,确定四轮智能小车在全局地图上绝对位置和姿态。
路径规划算法
路径规划问题,一直是移动机器人在自主导航过程中非常重要的组成部分,主要从两个方面入手:全局路径规划以及局部路径规划。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: