集成式电驱动桥双级行星齿轮减速器设计毕业论文
2020-02-17 12:47:38
摘 要
本文主要设计的是集成式电驱动桥的减速装置,设计中采用NGW型的行星齿轮传动,这种传动具有体积小,结构紧凑,承载能力大,传动效率高,传动比较大和运动平稳抗冲击等优点,满足电动汽车的动力性要求。本文中先确定减速器的传动比,然后对减速器各个部分进行设计,校核,最后利用catia对减速器进行三维建模以及cad绘制装配图和零件图。
关键词:电驱动桥;行星齿轮传动;减速器
Abstract
This paper mainly designs the deceleration device of integrated electric drive axle. NGW type planetary gear transmission is adopted in the design. This kind of transmission has the advantages of small size, compact structure, large load-carrying capacity, high transmission efficiency, large transmission ratio, smooth movement and shock resistance, etc. It meets the power requirements of electric vehicles. In this paper, the transmission ratio of the reducer is determined first, then the various parts of the reducer are designed and checked. Finally, the three-dimensional model of the reducer is built by catia, and the assembly and part drawings are drawn by cad.
Key Words:electric driving axle;planetary gearing;retarder
目 录
第1章 前言 1
1.1国内外的行星齿轮减速器研究现状 1
1.2行星齿轮减速器的优缺点 1
1.3研究目的 2
1.4研究的基本内容和技术方案 2
第2章 电动汽车动力性计算 4
2.1驱动电机功率的确定 4
2.2初选行星齿轮减速器的传动比 5
2.3电动汽车动力性校核 5
2.4本章小结 6
第3章 行星齿轮减速器传动方案确定 7
3.1传动类型选择 7
3.2传动比分配 8
3.3本章小结 8
第4章 行星齿轮参数设计 9
4.1配齿计算 9
4.2初步计算齿轮的主要参数 10
4.3行星齿轮几何尺寸计算 12
4.4行星齿轮强度校核 13
4.5行星齿轮传动的均载机构设计 17
4.6本章小结 17
第5章 主要构件的结构设计与计算 19
5.1轴的设计 19
5.2行星架设计 21
5.3轴承型号选择 22
5.4本章小结 22
第6章 箱体设计 23
6.1行星齿轮减速器的润滑 23
6.2机体的结构设计 23
6.3本章小结 24
第7章 总结与展望 25
7.1个人小结 25
7.2工作展望 27
致谢 28
参考文献 29
第1章 前言
1.1国内外的行星齿轮减速器研究现状
国内现状:
国内的行星齿轮减速器研究主要体现在起重,轻工化工,工程机械等方面,其生产地主要有北京,江苏,洛阳,成都等。在1975年,我国制定了NGW型行星齿轮减速器的三个系列,1984年,还颁布了NGW-L,NGW-S,NGW-Z等系列的标准。总体上,我国在行星齿轮减速器方面的研究发展的还算不错。
国外发展:
相对于国内,国外的行星齿轮减速器研究更好,应用得更普遍,发展更加迅捷。制作行星齿轮减速器比较好得公司有NEWSTART纽式达特,瑞士马格MAAG,日本三菱造船公司,DEMAG德国,ALLEN齿轮公司英国,这些公司制作的减速器有着高转速,传动功率大等优点。另外,Flender德国公司,宇都兴产日本公司和法国Citroen等公司制作的减速器则在低速重载方面做得比较好。
1.2行星齿轮减速器的优缺点
行星齿轮传动相比较于普通传动,有着以下几个优点:
(1)行星齿轮传动体积小、质量小、承载能力大、结构紧凑,通常情况下,行星齿轮传动的体积和质量约为普通齿轮传动的1/2-1/5。
(2)传动效率高。在行星齿轮传动中,效率可达到97%-99%。
(3)传动比大。若行星齿轮传动仅用于传递运动,其传动比可达几千。
(4)运动平稳,抗冲击、抗振动能力强,工作比较可靠。
行星齿轮传动具有体积小、结构紧凑、承载能力大、传动效率高、传动量大、运动平稳、抗冲击等优点。因此,行星齿轮传动在轻工业、化工、工程机械,起重等领域得到了广泛的应用。行星传动不仅可以用在高转速,大功率的地方,也可以用于低转速大转矩的传动装置上面。
行星齿轮传动技术不断发展。目前,高速渐开线行星齿轮传动的传动扭矩已达到4500kN·m,功率达到20000kW。至今,行星齿轮传动技术还将在如下几个方面发展。
(1)标准化,多品种。
(2)硬齿面,高精度。
(3)转速高,功率大。
(4)规格大,转矩大。
另外,行星齿轮传动也有所不足,即材料质量高,结构复杂,制造安装困难,与其他普通的齿轮减速器相比设计也较为复杂,但是伴随着科技发展,行星齿轮传动的结构不断地完善,制造工艺水平也不断地提高,正在努力克服以上的不足点。
1.3研究目的
了解了国内外行星齿轮减速器的发展状况及其特点以后,我们可以得知,当前的减速器正朝着大功率,大传动比,高机械效率,小体积小重量,寿命长,形式多样化,变形设计等多个方面发展。此次我的设计对象是集成式电驱动桥双级行星齿轮减速器,设计要求应尽量符合以上标准。此次设计可以培养我对所学相关专业知识的运用能力,并加深对行星齿轮传动的认知和学习。
1.4研究的基本内容和技术方案
基本内容:
(1) 根据整车动力性和经济性要求,确定电机功率、最高转速及减速器速比等主要参数;
(2) 减速器结构形式及总布置设计;
(3) 减速器配齿计算,主要齿轮参数计算;
(4)对减速器主要部件进行承载分析,建立力学分析模型,并校核其强度,刚度等,主要部件包括行星齿轮,轴,轴承,键等。
技术方案:
为了使减速器结构简单,暂定减速器的结构为双级行星齿轮串联。
整车基本参数(设计要求)
动力性经济性计算
行星齿轮速比确定
行星齿轮参数设计
减速器结构形式及总布置设计
承载分析,建立模型,校核强度刚度
三维建模,绘制二维图
第2章 电动汽车动力性计算
2.1驱动电机功率的确定
确定驱动电机的功率时,应该尽可能让电机在工作时处于高效率区段,以便于获得高效率的能量转化。电机的功率越大,电动汽车的动力越大,加速性能越好,爬坡能力最大。然而,电动机的体积和质量将相应地增加,同时电机也无法保持在高效率区段工作。因此,选择电机的功率时应满足电动汽车的动力性要求,及最高车速(100Km/h)时的功率 ,0-30Km/h的加速时间(10s)的功率
,0-30Km/h的加速时间(10s)的功率 ,最大爬坡度(20%)时的功率
,最大爬坡度(20%)时的功率 ,可以表示为:
,可以表示为:

其中,
 ;
;
 ;
;
 ;
;
以上三式中,
 ,传动系机械效率,取经验值0.92;
,传动系机械效率,取经验值0.92;
 ,电动汽车满载质量,为5500Kg;
,电动汽车满载质量,为5500Kg;
 ,汽车在良好路面上的滚动阻力系数,取为定值0.014;
,汽车在良好路面上的滚动阻力系数,取为定值0.014;
 ,最高车速,为100Km/h;
,最高车速,为100Km/h;
 ,空气阻力系数,为0.6;
,空气阻力系数,为0.6;
 ,迎风面积,算得5.67m²;
,迎风面积,算得5.67m²;
 ,汽车爬坡时的爬坡速度,取为20Km/h;
,汽车爬坡时的爬坡速度,取为20Km/h;
 ,最大爬坡度,为arctan0.2,即11.31°;
,最大爬坡度,为arctan0.2,即11.31°;
 ,0-30Km/h加速时间,10s;
,0-30Km/h加速时间,10s;
 ,加速末速度,30Km/h;
,加速末速度,30Km/h;
将数据带入式中,计算得到:

根据电机的规格,可取电机的最大功率为80Kw,额定功率为40Kw。该电机的最大转速为12000r/min,基速为4000r/min。
2.2初选行星齿轮减速器的传动比
确定好驱动电机的功率以后,接下来应该初步确定行星齿轮减速器的传动比,可以由以下两个方面计算得到传动比的范围:
电机的最大转速直接关联到汽车动力性中的最大车速,其关系式为:
 ;
;
其中,
 ,电机的最大转速,为12000r/min;
,电机的最大转速,为12000r/min;
 ,汽车轮胎半径,为0.364m;
,汽车轮胎半径,为0.364m;
计算得到:

另外,汽车的最大爬坡度可以由电机的最大扭矩确定,其关系为:
 ;
;
 ,电机的最大扭矩,为320Nm;
,电机的最大扭矩,为320Nm;
计算得到:

由此可以初步选择行星齿轮减速器的传动比约为15。
2.3电动汽车动力性校核
选取好减速器的传动比后,需要校核其是否满足电动汽车的动力性要求,即最高车速,加速能力,最大爬坡度。
最高车速:
 ;
;
计算得到 =266Km/h,满足要求。
=266Km/h,满足要求。
加速能力(0-30Km/h加速时间):
 ;
;
计算得到 =9.03s,满足要求。
=9.03s,满足要求。
最大爬坡度:
 ;
;
计算得到 =12.13°,满足要求。
=12.13°,满足要求。
2.4本章小结
本章中首先确定了电动汽车驱动电机的功率大小,然后根据已选择的电机参数以及汽车动力性参数初步选择了行星齿轮减速器的传动比大小,最后以选择的传动比来校核电动汽车的动力性要求,及最高车速,加速时间,最大爬坡度是否合格。
第3章 行星齿轮减速器传动方案确定
确定好行星齿轮减速器的传动比以后,即可正式开始行星齿轮减速器的设计了。减速器的设计首先应选取行星齿轮减速器传动类型,主要根据该行星齿轮传动的用途,工作特点,传动比和传动功率等方面确定。
3.1传动类型选择
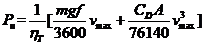
根据第二章中选择的减速器传动比为15以及行星齿轮减速器的工作状况(作为电动汽车驱动桥主减速器使用)可以得知,本次设计的行星齿轮减速器应具备以下特点:外形尺寸小,质量小,传动效率高,传动比较大等优点,还要满足传动系统的扭矩转速,输入输出功率的要求,所以我选择用两个NGW型行星齿轮串联而成的双级行星齿轮减速器,除了上述优点外,该行星齿轮减速器还具有结构简单,制造容易等优势。其传动简图如下:
其动力传递路线为:输入轴-高速级太阳轮-高速级行星轮-高速级行星轴-高速级行星架-联轴器-低速级太阳轮-低速级行星轮-低速级行星轮-低速级行星架-输出轴。
3.2传动比分配
为了使设计的减速器结构尺寸满足要求,前后两级行星齿轮传动尺寸相差不大,成本较低,制造安装方便等,行星齿轮传动的最大径向尺寸不超过380mm,暂定两级行星齿轮传动比的关系为 ,
,
 分别为高速级和低速级的传动比。另由关系式:
分别为高速级和低速级的传动比。另由关系式:

可以计算得到, =4.6,
=4.6, =3.3
=3.3
3.3本章小结
本章根据行星齿轮传动比以及行星齿轮减速器的工作状况等确定了减速器的额传动类型并将总传动比按照尺寸要求分配到了行星齿轮减速器前后两级行星齿轮传动上。
第4章 行星齿轮参数设计
4.1配齿计算
高速级:
一般来说,在行星齿轮传动中绝大部分都选择行星轮个数为 =3个,因此在此次设计中同样选择高速级和低速级都为3个行星轮。为了尽可能缩小行星齿轮传动的径向尺寸,在给定传动比下,应尽量减小中心轮
=3个,因此在此次设计中同样选择高速级和低速级都为3个行星轮。为了尽可能缩小行星齿轮传动的径向尺寸,在给定传动比下,应尽量减小中心轮 和行星轮
和行星轮 的尺寸,因此太阳轮的齿数暂定为28,即
的尺寸,因此太阳轮的齿数暂定为28,即 =28。
=28。
根据行星齿轮传动的传动比条件:



