基于MatlabSimulink的永磁同步电机控制的建模与仿真毕业论文
2020-02-17 20:29:47
摘 要
虽然传统汽车工业的蓬勃发展为世界经济的繁荣做出巨大贡献,但是我们却不应该忽视传统内燃机汽车的使用所产生的污染问题。电动汽车的发明符合当今社会对于环保和节能的要求,因而受到日益关注。具有高效率、宽转速范围、小体积、轻重量、大功率密度、低成本特点的永磁同步电机是纯电动汽车市场的主要驱动电机。因此,探究永磁同步电机的控制系统对于电动汽车的发展十分必要。
本文在探讨了永磁同步电机的构造和分类的基础上,给出了自然坐标系下三相永磁同步电机的基本数学模型,并且对其进行静止坐标变换(Clarke变换)和同步旋转坐标变换(Park变换)。然后,论文对空间矢量脉宽调制(SVPWM)的原理以及实现过程进行了详细说明。在此基础上,结合矢量控制策略和传统PI控制,本文使用Matlab/Simulink建立了基于方法的三相PMSM矢量控制系统模型。仿真结果显示,本文所建立的系统模型是可行的,并且能够作为进一步研究PMSM控制系统的基础模型。最后,采用内模控制理论对电流PI调节器进行优化以及引入一个Ba参数对速度PI调节器进行参数设计,使得系统的动态性能和稳态精度得到明显提高。
关键词:永磁同步电机;矢量控制;空间矢量脉宽调制;内模控制;PI 调节器
Abstract
Although the rapid development of the traditional automobile industry has made a great contribution to the prosperity of the world economy, the environmental pollution resulting from conventional vehicles cannot be ignored. Thus, People increasingly pay attention to the Electric Vehicle (EV) that is in line with the requirements of today's society for environmental protection and energy conservation. The Permanent Magnet Synchronous Motor (PMSM) with high efficiency, wide rotation speed range, small volume, light weight, high power density and low cost is the main driving motor in the pure electric vehicles market. Therefore, it is necessary to study the control system of PMSM for the development of the EV.
Based on the analysis of the structure and classification of permanent magnet synchronous motors, the basic mathematical model of three-phase permanent magnet synchronous motor in the natural coordinate system is detailed, and the Clarke transformation and Park transformation are carried out. Besides, the principle and the realization process of Space Vector Pulse Width Modulation (SVPWM) software algorithm are introduced. Then, combined with the vector control strategy and conventional PI control, in the Matlab/Simulink environment, the vector control system module of PMSM is established on the basis of method. The simulation results show that the design of simulation module is feasible and can be used as a basic model for further research. Finally, using Internal Model Control (IMC) to optimize the PI regulator and introducing a Ba parameter to design the speed PI regulator, the dynamic performance and steady-state accuracy of the system are significantly improved.
Key words: PMSM; Vector Control; SVPWM; IMC; PI regulator
目 录
第1章 绪论 1
1.1 研究背景和意义 1
1.2 永磁同步电机理论模型简介 1
1.3 永磁同步电机控制方法的研究现状 4
1.4 相关仿真模型和实验平台介绍 4
1.4.1 几种典型的仿真模型 5
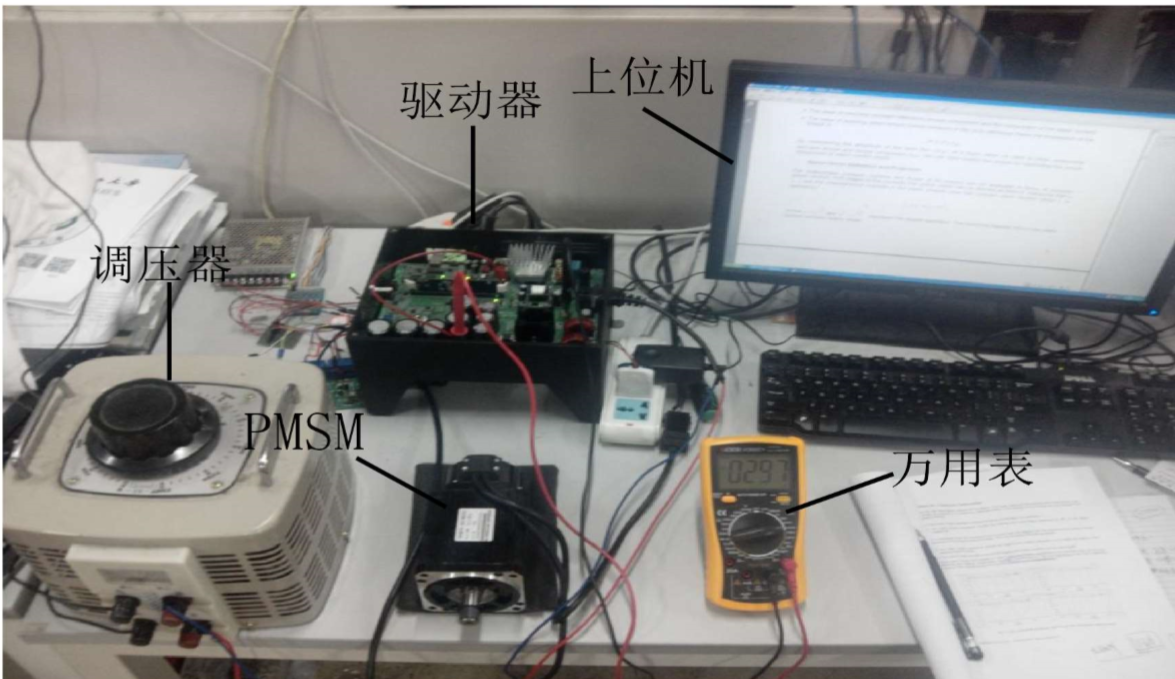
1.4.2 几种典型的实验平台 6
1.5 本文研究的主要内容 9
第2章 永磁同步电机数学模型 10
2.1 永磁同步电机的构造及分类 10
2.1.1 永磁同步电机的构造 10
2.1.2 永磁同步电机的分类 10
2.2 永磁同步电机基本数学模型 11
2.3 永磁同步电机的坐标变换 12
2.3.1 静止坐标变换 12
2.3.2 同步旋转坐标变换 13
第3章 空间矢量脉宽调制 16
3.1 空间矢量脉宽调制的原理 16
3.2 空间矢量脉宽调制的实现 17
3.2.1 判断参考电压矢量所在的扇区 17
3.2.2 计算相应的零电压矢量和非零电压矢量的作用时间 17
3.2.3 获得扇区矢量切换点 19
第4章 永磁同步电机矢量控制系统设计 20
4.1 永磁同步电机矢量控制原理 20
4.2 永磁同步电机矢量控制方法 20
4.3 永磁同步电机矢量控制系统 21
4.4 比例积分(PI)控制 21
4.4.1 PI控制原理 22
4.4.2 PI参数整定 22
第5章 永磁同步电机控制系统的仿真及分析 23
5.1 Matlab/Simulink工具简介 23
5.2 仿真模型的建立 23
5.2.1 坐标变换模块建立 24
5.2.2 空间矢量脉宽调制模块建立 26
5.2.3 传统PI调节器模块建立 28
5.3 基于矢量控制系统的仿真 28
5.3.1 负载转矩突变仿真 28
5.3.2 转速突变仿真 29
5.3.3 仿真结果分析 30
5.4 系统的优化 31
5.4.1 电流PI调节器的优化 31
5.4.2 速度PI调节器的优化 32
5.4.3 系统优化后的仿真 33
第6章 总结与展望 36
参考文献 37
致谢 39
第1章 绪论
1.1 研究背景和意义
环境问题和能源问题是世界各国共同面临的棘手问题。传统的内燃机车辆使用汽油、柴油等不可再生资源作为燃料,这不仅加剧了能源危机,还对生态环境造成了严重的污染和破坏。因此,世界各国都在积极探索新的技术和方法来减少汽车的尾气排放和降低对不可再生能源依赖,其中电动汽车技术引起了极大的关注[1]。
电动汽车(Electric Vehicle,EV)的定义是:以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆[2]。与传
与燃油车相比,电动汽车对能源的利用率更高,碳排放量更低,产生的污染更少,在环境保护和能源节约等方面具有巨大的优势。
驱动电机作为电动汽车的主要部件(电池、电机、电控)之一,是电动汽车行进中的主要执行结构,其控制系统的性能对整车性能具有决定性的影响。目前,电动汽车的驱动电机解决方案一般分为交流异步电动机(IM)、永磁同步电动机(PMSM)和开关磁阻电机(SRM)。其中,开关磁阻电机主要应用在客车领域。在乘用车领域,以特斯拉为代表的欧美国家的电动汽车厂商主要使用交流异步电动机;然而,国内自主的电动汽车厂商大都使用永磁同步电动机。这种差异的形成主要是因为以下两点原因:一方面,稀土作为永磁同步电机转子结构的关键材料,中国占据着全球70%的稀土资源,中国的钕铁硼磁性材料的产量更是占到全球总产量的80%。很明显,欧美等国的汽车厂商若想使用永磁同步电机还要考虑高价进口稀土的现实问题。对于缺少稀土资源的欧美国家而言,电动汽车的驱动电机的解决方案是与国家经济利益密切相关的。另一方面,从技术角度来看,这两种电机的确各有优劣。交流异步电动机虽然结构简单可靠、制造运行方便、无“退磁”风险,但存在电能损耗大、重量沉和体积大等缺点。永磁同步电机虽然效率高、功率密度高、体积小、重量轻,但存在抗热冲击性较差、抗振性较差以及存在“退磁”现象的缺点。不过,在目前电池续航技术尚未取得突破的条件下,永磁同步电机的高效率可以使得电动汽车增加续航里程,除此之外,它的综合性能相对更优。因此,对于PMSM控制系统的研究,不但关系着我国电动汽车的产业化进程,而且对提升我国电机产业在全球的竞争力十分关键。本文主要是利用Matlab/Simulink工具,结合PI控制,对结构简化后的基于三相PMSM矢量控制系统进行建模和仿真,验证其可行性,并对其进行改进和优化。
1.2 永磁同步电机理论模型简介
永磁同步电机是一个强耦合、多变量的非线性系统。要想精确地控制永磁同步电机,首先要建立合适的数学模型。长期以来,很多学者都对PMSM的数学模型做了深入地研究。
周洁等人[3]以理想的单相PMSM为研究对象,在自然坐标系(ABC坐标系)下建立了通用的数学模型,得到了在任意转差率下的平均电磁转矩表达式,为单相PMSM的性能分析打下了基础。此外,他们还使用C语言编写了单相永磁同步电机曲线的计算程序,并对一台样机进行了计算。由图1.1可知,计算值与实测值基本吻合,该数学模型误差较小。
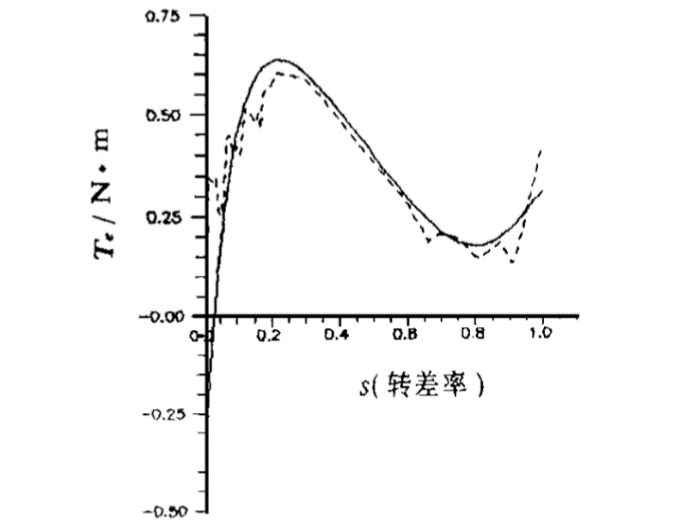
- 曲线[3]
聂勇祥[4]以理想的三相PMSM(忽略铁芯饱和效应、不计涡流损耗和磁滞损耗以及气隙磁场呈正弦分布)为研究对象,对其简化模型图进行分析,如图1.2所示,得到了在ABC坐标系下的理想的三相PMSM的数学模型。此外,为了简化三相PMSM在ABC坐
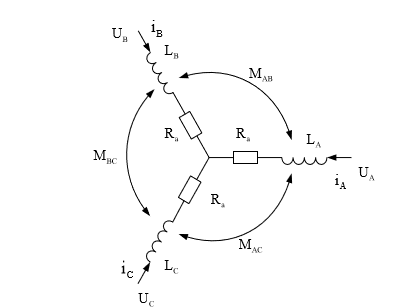
- 三相永磁同步电机的简化模型图[4]
标系下的数学模型,他对复杂的电压方程进行解耦,通过 Clarke 变换,将ABC坐标系变换为两相静止坐标系(α-β坐标系);再通过Park 变换,将α-β坐标系变换为两相旋转坐标系(d-q坐标系)。然后,借助d-q坐标系,分析可得:通过对 d轴电流和q轴电流分别进行调节便可实现对三相PMSM的控制。
谢卫[5]等人在考虑铁芯饱和效应的情况下,改进了传统的三相PMSM的数学模型。铁芯饱和问题的有效处理关键在于饱和因子的合理选择 , 通常做法是选取分别正比于d轴和q轴的磁化电流作为磁化电感的饱和因子[5]。他借助状态变量法,选取定子电流以及转子磁链作为状态变量,重新定义了饱和因子。该饱和因子可由状态变量直接计算得到,避免了迭代计算。
高仕红[6]等人在考虑铁耗的情况下,给出一种新的三相PMSM的数学模型。他们在同步旋转坐标系中假设铁耗由等效涡流绕组产生, 在定子电压方程中使用一个等效铁耗电阻来表示铁耗,由于等效铁耗电阻的存在, 从而导致d轴和q轴的磁通相互影响, 输出电磁转矩也受等效铁耗电阻影响。考虑铁耗时的同步旋转坐标系下d-q轴绕组模型,如图1.3所示。
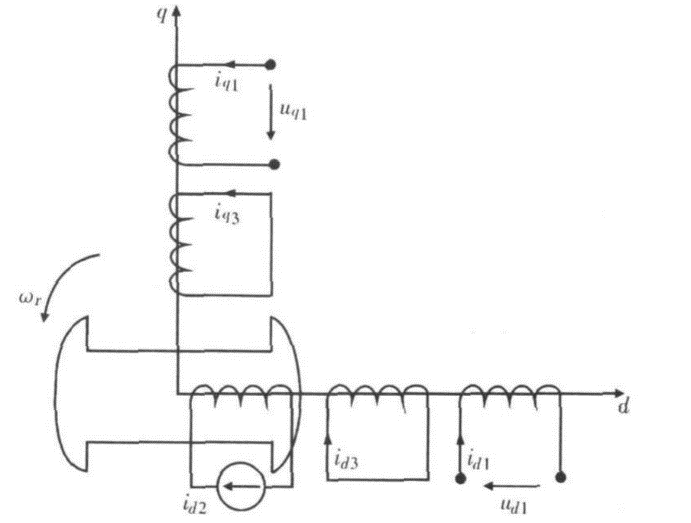
- 考虑铁耗时的d-q轴绕组模型图[7]
杜丽娟[8]等人在研究了传统的PMSM数学模型基础上,将传统PMSM控制系统中的执行机构即逆变器部分与电机综合考虑,定义一个切换信号,推导给出扩展的切换数学模型,并用状态方程的形式表达。该切换数学模型将逆变器的直流电压 和切换信号作为模型输入,推导出状态变量 、、与输入 和所满足的切换信号控制下的状态方程。
1.3 永磁同步电机控制方法的研究现状
PMSM的控制方法按照出现的先后顺序,大致可以分为标量控制(Scalar Control)、矢量控制(Vector Control)以及直接转矩控制(Direct Torque Control)。
标量控制以电机的稳态数学模型为基础,恒压频比控制是一种主要的标量控制方法。恒压频比控制实际上是一种变频调速,它通过改变电源频率来实现电机的转速调节。变频调速中,为了使功率因数和励磁电流基本保持恒定,需要保证定子磁通不变,也就是保持定子电压和定子频率的比值恒定[9]。恒压频比控制是一种简单的开环控制方法,性能较差,且主要适用于感应电机的控制,而在永磁同步电机的控制中很少使用。
矢量控制又叫解耦控制,由德国西门子公司的F.Blaschke于1971提出[10]。PMSM矢量控制的基本思想是:把定子电流分解成两个分量,一个负责产生转矩,一个负责励磁,这2个分量彼此独立,互相垂直,然后可以分别对这两个分量进行调节,从而使得PMSM具有和直流电机(DC-Motor)一样良好的动态性能。
1985年,M.Depenbrock教授和 I.Takahash教授分别提出了六边形直接转矩控制方案以及圆形直接转矩控制方案[11],这是直接转矩控制的基础。经过发展,PMSM直接转矩控制策略的主要思想可总结为:在转子磁链恒定的条件下,通过调节定子和转子磁链之间的夹角可以达到获得特定大小电磁转矩的目的。直接转矩控制策略结构简单、计算直接、容易实现,但是存在着转矩和磁链波动过大的缺点[12]。
无论是传统的矢量控制策略还是直接转矩控制策略,都需要采用位置传感器获取电机转子的机械位置或速度。但是传感器的性能与电机的工作环境关系密切,高温,高湿度、高振动、强磁场都有可能导致传感器的失效。因此,关于无位置传感器的永磁同步电机控制的研究开始流行起来。当前,关于无位置传感器的永磁同步电机控制的研究大致有三种思路。第一种是从电机的数学模型出发,通过检测相关变量,来推导计算转子的机械位置,主要包括通过反电动势进行推导计算和通过定子磁链进行推导计算两种方法[13]。第二种是构造观察器方法,常见的观测器有神经网络观测器[14]、滑模观测器[15]、卡尔曼滤波器[16]以及模糊控制观测器[17]等。第三种是高频注入法[18],即将高频信号附加到基波信号上一起输入到电机的定子绕组,通过分析对应的电流可以得到转子的机械位置信息。
1.4 相关仿真模型和实验平台介绍
下面介绍几种典型的永磁同步电机控制系统的仿真模型和实验平台。这些仿真模型和实验平台的建立不仅可以验证控制算法的合理性,学者们还可以通过观察和分析仿真结果和实验结果,来进一步完善永磁同步电机控制系统的相关理论。
1.4.1 几种典型的仿真模型
徐明萌[19]基于直接转矩策略,使用Matlab/Simulink工具创建了相应的仿真模型。该仿真模型主要由主电路模块和控制模块构成,如图1.4所示。逆变器单元、电机测量单元和永磁同步电机共同构成主电路模块;磁链和转矩估计单元、磁链区间判断单元、速度环调节单元、电压矢量开关选择单元和Clarke变换单元共同组成控制模块。
- 永磁同步电机直接转矩控制仿真系统[19]
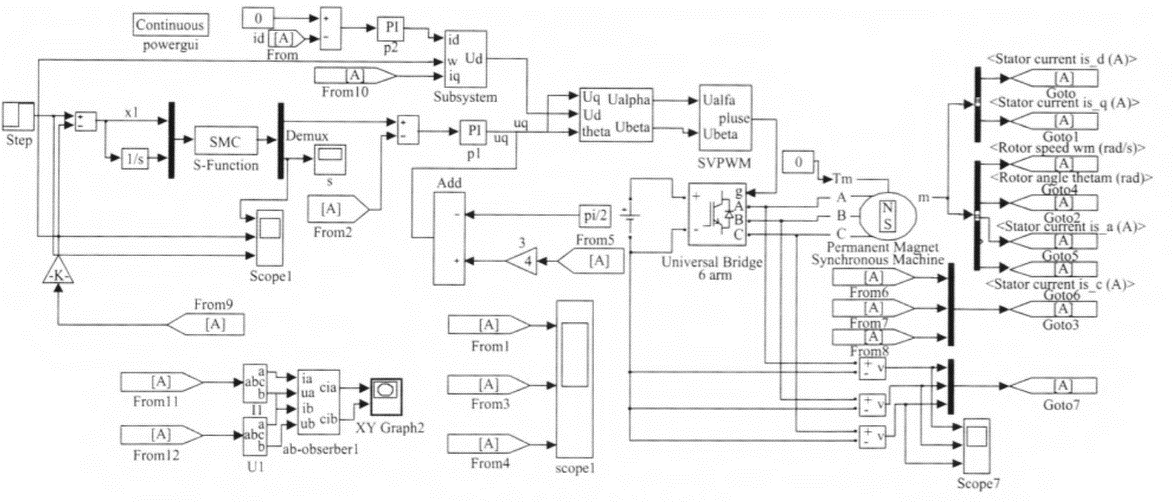
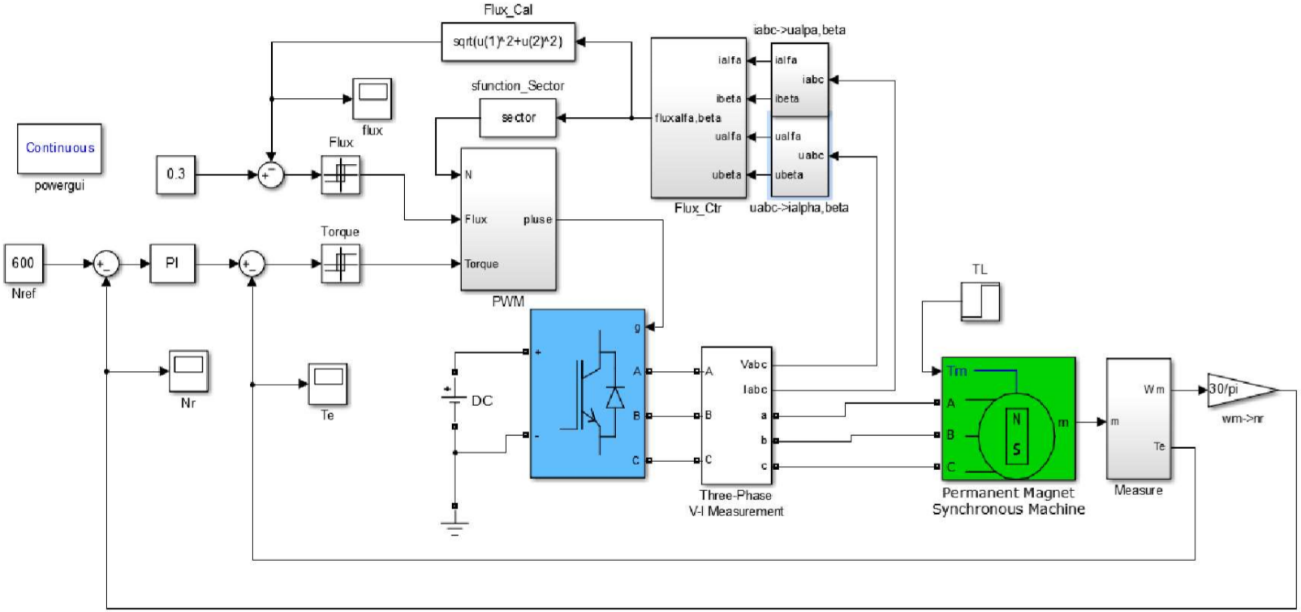
Sanjeet Dwivedi[20]等人基于矢量控制原理,在Matlab/Simulink的环境下搭建了仿真系统,如图1.5所示。该矢量控制仿真系统主要由PI速度控制器、参考电流产生器、PWM模块、永磁同步电机和基于IGBT的电压源逆变器组成。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: