基于Nao机器人的人体动作模拟系统设计毕业论文
2020-02-17 23:05:55
摘 要
21世纪以来,机器人技术进入了快速发展的阶段,机器人已经被广泛应用到人类生活的各个领域。机器人智能化程度的发展对于人类社会的发展有着重大意义,模仿学习的能力逐渐成为衡量机器人智能化程度的重要因素。本文基于Nao机器人来实现人体动作的模仿,使Nao机器人具备一定的人工智能,涉及计算机视觉、模式识别及机器人运动学的相关理论及技术,可应用于智能家庭、办公室等各种领域,具有一定的理论及应用研究价值。
Nao机器人是一款智能化程度很高的仿人机器人,它全身有20个关节,25个关节自由度,因而可以模仿人体的大部分动作。我们使用Nao机器人提供的NAOqi框架进行程序开发,NAOqi框架可以在Windows、Linux等多种操作系统下使用,可以充分发挥Nao机器人硬件配置的优势。Nao机器人的运动控制系统由DCM模块和ALMotion模块构成,网络通信系统由ALConnectionManager模块负责。
首先基于Kinect深度传感器对人体动作进行分析和识别。Kinect深度传感器可以采集图像的深度信息,我们采用微软自己的Kinect for Windows SDK框架来连接Kinect,用C 编写相应函数绘制人体骨骼姿态图,并检测人体各关节的位置和姿态。其后,通过坐标转换将Kinect坐标系下的数据转换为Nao的关节参数,采用了限幅滤波算法和滑动平均滤波算法来排除脉冲干扰和周期性干扰,这样可以得到优化的人体姿态数据。最后,基于Nao机器人的动力学模型,驱动Nao机器人各个关节电机旋转,实现对人体动作的模仿。
实验结果表明,示范者站在Kinect视野范围内进行手臂动作,Kinect可以实时采集人体的骨骼姿态数据,驱动Nao机器人跟随人体进行手臂动作,初步实现了人机交互。
关键词:Nao机器人;人机交互;模仿学习;骨骼跟踪;Kinect
Abstract
Since the 21 st century, robot technology has entered a stage of rapid development, robot has been widely used in all fields of human life. The development of robot intelligence is of great significance to the development of human society. The ability of imitation learning has gradually become an important factor to measure the degree of robot intelligence. In this paper, based on Nao robot to realize the imitation of human action, Nao robot has certain artificial intelligence, involving computer vision, pattern recognition and robot kinematics related theories and technologies, can be applied to intelligent families. Office and other fields, has certain theoretical and applied research value.
Nao robot is a highly intelligent humanoid robot, which has 20 joints and 25 joint degrees of freedom, so it can imitate most of the movements of the human body. We use the NAOqi framework provided by the Nao robot for programming, and the NAOqi framework can be used under many operating systems, such as Windows,Linux. It can give full play to the advantages of hardware configuration of Nao robot. The motion control system of Nao robot is composed of DCM module and ALMotion module, and the network communication system is composed of ALConnectionManager module. Be responsible.
Firstly, the human action is analyzed and identified based on Kinect depth sensor. Kinect depth sensor can collect the depth information of image. We use Microsoft's own Kinect for Windows SDK framework to connect to Kinect,. C is used to compile the corresponding function to draw the posture map of human bone, and to detect the position and attitude of each joint of human body. After that, the data in Kinect coordinate system is converted into the joint parameters of Nao by coordinate transformation, and the limiting filtering algorithm and sliding average filtering algorithm are used to eliminate pulse interference and periodic interference. In this way, the pulse interference and periodic interference can be eliminated. In order to get the optimized human posture data. Finally, based on the dynamic model of Nao robot, each joint motor of Nao robot is driven to rotate, and the simulation of human action is realized.
The experimental results show that the demonstration personnel are standing in Kinect's field of view for arm movement, Kinect can collect the bone posture data in real time, drive the Nao robot to follow the human body arm action, and realize the human machine interaction preliminarily.
Keywords: Nao robot; human-computer interaction; imitation learning; bone tracking; Kinect
目 录
第一章 绪论 1
1.1 论文研究背景及意义 1
1.2 国内外的研究现状 1
1.2.1 人机交互的研究现状 1
1.2.2关于模仿学习的研究现状 3
1.3论文组织架构 3
第二章 Nao机器人及其运动系统 4
2.1 Nao机器人介绍 4
2.1.1 Nao机器人的硬件配置 4
2.1.2 图形化用户软件Choregraph 6
2.1.3 嵌入式开发软件NAOqi 7
2.2 Nao机器人运动控制系统 8
2.2.1 DCM模块 8
2.2.2 ALMotion模块 8
2.3 Nao机器人的网络通信系统 8
2.4 本章小结 9
第三章 示范者人体关节数据获取 10
3.1关于Kinect的介绍 10
3.1.1 硬件环境 10
3.1.2软件开发环境 10
3.2利用Kinect获取人体骨骼姿态数据 10
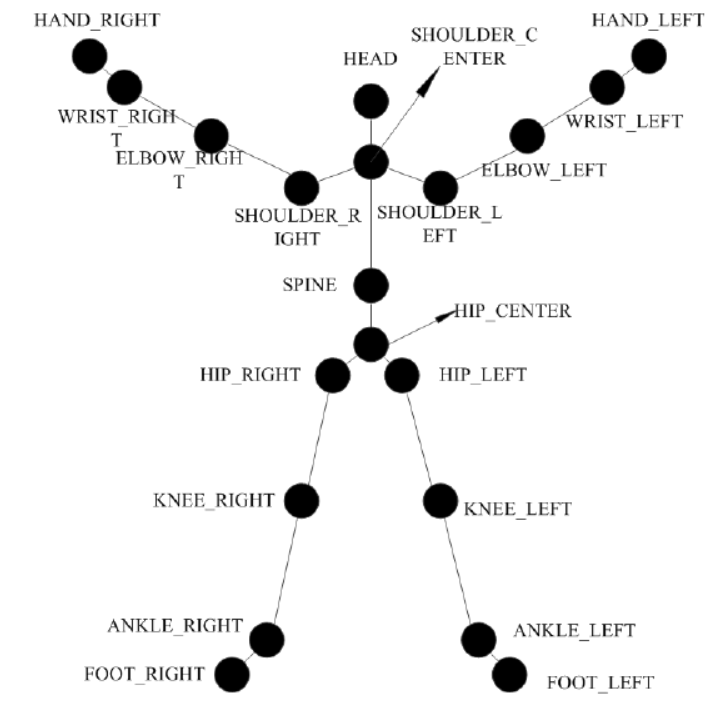
3.2.1骨架空间 10
3.2.2骨骼追踪 12
3.2.3编程处理 13
3.3利用Kinect深度传感器获取人体深度图像 17
3.4 本章小结 17
第四章 基于Nao机器人的人体手臂动作模仿 18
4.1建立Nao目的虚拟坐标系 18
4.2 Nao机器人关节求解 19
4.3 数据优化滤波 21
4.4 编程实现 24
4.4 效果展示及实验结果分析 27
4.5 本章小结 29
第五章 总结与展望 30
5.1 总结 30
5.2 展望 30
参考文献 31
致谢 32
第一章 绪论
进入21世纪以来,仿人机器人的发展逐步成为人们关注的焦点,而模仿能力是衡量仿人机器人智能化程度的重要因素。模仿是指个体模仿学习其他个体行为的一种学习方式,这种方式被广泛承认为社会学习最高效和直接的方式。尤其在人类成长过程中,例如婴儿的语言,动作,行为甚至人格的成长,都和模仿有着密不可分的关系。由于编程是一项费时费力的任务,而且需要高水平的机器人专家来操作,对于复杂多变的工作环境和任务难以普及,模仿可能是一种有效的方式来替代繁杂的人工编程,使机器人可以更加人性化的为人类服务。
- 论文研究背景及意义
进入21世纪以来机器人技术得到了飞速发展,在人类生活的各个领域到处活跃着机器人的影子,机器人的普及使得普通人都可以享受到机器人带来的福利。餐厅、机场等服务行业的机器人与人的接触越来越密切,并为我们的生活提供了极大的便利。机器人对于人行为的理解逐渐成为人们关注的焦点,这对于机器人的安全性、智能化等提出了更为严格的要求。
人机交互一直以来是机器人学的研究重点。一个成功的交互与很多因素都有关系。模仿学习是实现人机交互最直观的方式,用户将扮演引领者的角色在实验过程中,实时进行一个肢体动作,使机器人跟随示范者进行动作模仿。
机器人模仿目前来说分为两大类:模仿学习和动作模仿。仿人机器人在模仿能力上的要求要更高。这是因为仿人机器人与人的相似度较高,可以完美的替代人类的工作,甚至可以完成一些人类也无法完成的挑战。目前对于仿人机器人的智能化的研究是仿人机器人最主要的发展方向,随着硬件与软件的快速发展,许多融合当下最新科技的仿人机器人应运而生。模仿学习的研究方向涉及到人工神经网络,动作模仿的研究方向目前主要是通过相应的深度传感器采集数据,将人体关节数据和机器人关节数据相对应,这样,随着人体关节位置的变动,机器人的关节位置将随之变动,使机器人复制人体的动作,从而在机器人上面得到反馈。仿人机器人在不断的动作模仿的过程中将建立自己的动作库,这就涉及到机器人的模仿学习了。事实上,仿人机器人的模仿学习就是建立在其动作模仿的基础上的,利用相关学习算法,在需要时从机器人的动作库中调用合适的动作。
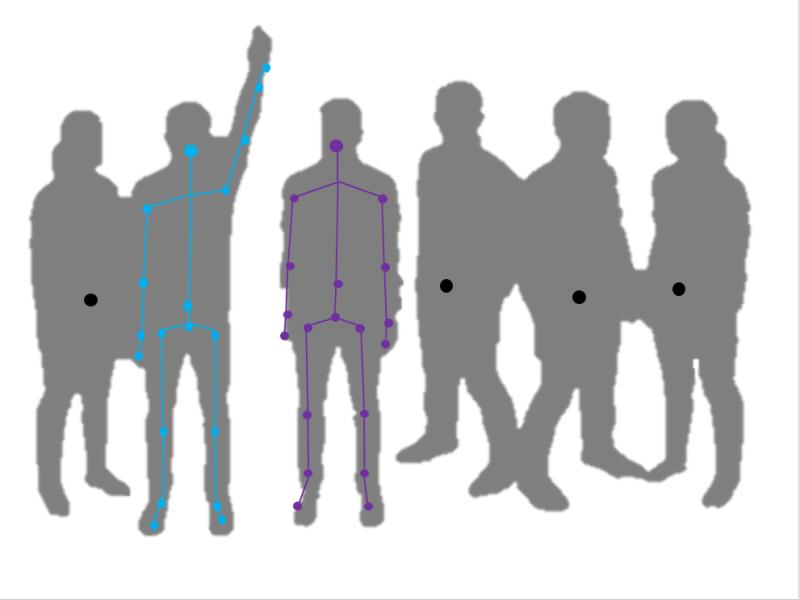
Kinect是目前微软推出的一款体感设备,目前主要应用在游戏产业。Kinect可以采集游戏者的骨骼运动状态并实时的反映到游戏中,在本文中我们可以利用Kinect深度传感器获取示范者的骨骼数据,我们就可以绘制人体骨骼框架图。
本论文的题目是基于Nao机器人的人体动作模拟系统设计,故我们以Nao机器人作为本次实验的平台。Nao机器人是目前科技化程度最高的仿人机器人之一,它的硬件配置十分出众,融合了当下最新的科技,许多应用软件也可以在Nao机器人上运行。Nao机器人的外形与人类十分相似,合理的布局使得Nao机器人显得十分可爱,这样它在与人类互动时更加亲切。
- 国内外的研究现状
- 人机交互的研究现状
- 国内外的研究现状
机器人和人类参加同一活动并进行沟通共处称之为人机交互(Interaction between human and robots)。这个领域旨在打通人与机器人沟通的知识渠道。设计到人机交互的
第一篇文献是由来自美国的学者B.Shackel发表的,这吸引了一大批机器人学者的兴趣,自此之后,人机交互一直作为一个热门的领域。
在上世纪机器人刚刚进入人们的视野时,最原始的人机交互通过信号灯、纸片等较为传统的方式来完成,这样的人机交互效率极为低下。随着计算机技术的快速发展,机器人专家做出了机器人的交互界面,这样人与机器人的交互可以通过界面来完成,人们摆脱了繁杂的方式,在当时来说可以说是迈出了一大步。但依赖人机交互界面的交互方式依旧显得很呆板,与高新科技的发展格格不如。智能机器人的出现为机器人专家指出了新的研究方向,智能机器人在人机交互领域表现优异,人机交互技术在智能机器人平台上也得到了飞速发展[1]。
进入21世纪以来,人机交互技术得到了质的发展,目前人机交互领域主要涉及到以下几个方面的交互:
(1)语音交互
TTS技术可以使机器说话,TTS全称为text to speech。TTS技术的成功是以语言学、心理学等领域为基石的,借助马尔可夫模型可以识别出文字,再将文字内容识别并转换为语音输出。TTS技术被广泛应用到人机交互之中,增强了文本文档的可读性。
SPT技术,全称为speak to text,是一种将语音输入转化为文本输出的一种语音交互的方式。SPT技术最常用的方式是将人类说的话通过机器识别并在电子屏幕上显示出来.
TTS和SPT技术在车辆、医疗、航空航天、军工等许多领域都有着极为广泛的应用,语音交互技术对于人机交互的效率有着显著提升。
(2)图像交互
法国Aldebaran Robotic公司制作出的一款仿人机器人——Nao机器人[2]。Nao机器人在人机交互领域表现优异。如图1-1所示,使用图形化编程软件Choregraph可以Nao机器人自动识别人脸,在检测到人脸之后机器人的语音系统发出“已检测到人脸”的声音。
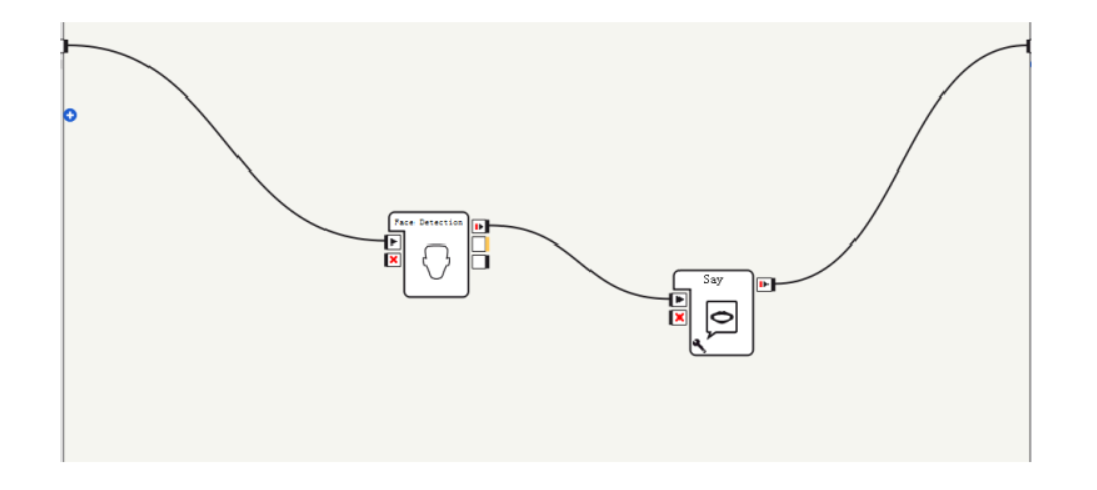
图1-1 Nao机器人完成人脸识别
- 数据交互
自计算机诞生初期数据交互就一直作为一种最有效率的方式存在,在机器人上我们也可以通过数据交互与机器人进行互动,可以对机器人发送指令,使机器人达到人类预期的交互效果。
(4)动作交互
上文至此介绍了语音交互、图像交互和数据交互,还有一些情形动作交互可以更为直观高效。动作交互首先需要使机器人获取人体姿态数据,这就需要借助可以检测到人体骨骼数据的传感器,将采集到的数据转换为机器人的运动参数,驱动机器人关节电机完成指令。动作交互的能力是体现仿人机器人智能化程度的重要因素。人体关节数众多,数据处理量较大,捕获人体动作难度较高,这对于仿人机器人的感知能力有着严格的要求。在本文中我们将利用基于动作交互的人体交互技技术完成基于Nao机器人的人体动作模拟系统设计。
1.2.2关于模仿学习的研究现状
模仿学习是一种相对传统但却十分有效率的学习方式。许多研究者因其相对简单但有效的学习方式开始投入到机器人模仿学习这个领域中。研究者最初从比较基础的坐标转换探究机器人的模仿行为,随着科技的不断进步,时下最新的研究方式要结合到神经网络技术,涉及到计算机视觉、强化学习算法等多个领域,这使得机器人的模仿学习能力有了质的发展。
机器人要完成一个动作需要多个组件协同完成,许多专家都对机器人的动作模仿技术做出了详细的论述,经过众多学者的努力,视觉引导这一机器人模仿学习策略被广泛应用。
机器人的动作模仿由多个单元组件协作完成,美国学者Berger对机器人的模仿过程做了详尽的介绍。基于视觉引导的机器人模仿方式通过多种方法极大的拓宽了当前的模仿学习。首先借助Kinect深度传感器获取人体骨骼数据。由于机器人和人体的关节数据相差较大,研究者采用人体姿态优化这一方法。即首先将数据由高维空间变换到低维空间,优化获取到的数据,再转移到低维空间数据,低维空间数据是关节曲线的代表[3]。
国内的科研机构在机器人的模仿学习领域也投入巨大,目前研究方向呈现多元化的特点。国内的机器人专家在人体的姿态识别方面和模仿学习方面都有较大的建树。
智能机器人的智能化程度目前主要体现在其模仿能力上,现在国内外对于机器人模仿学习的研究主要有两个方向,一个方向重在通过相应的数据传感器记录人体的行为,建立机器人自己的行为库,在需要时调用。另一个方向是重在机器人自己的思维策略,通过建立类似于人工神经网络的系统,再利用强化学习算法,使机器人达到模仿学习的目的。
1.3论文组织架构
本文实现了基于Nao机器人的人体动作模拟系统的设计,主体的框架结构如下:
第一章最主要叙述了此次论文的研究背景,接着描述了目前的国内外发展现状,在国内外发展现状中主要讲述了人机交互的研究现状和模仿学习的研究现状。‘
第二章首先详细说明Nao机器人出色的硬件配置,接着介绍了图形化编程软件Choregraph对于Nao机器人编程的优越性以及Nao机器人的开发框架NAOqi,然后对Nao机器人的运动控制系统进行了详细论述,包含DCM(Devices Communication Manager)模块和ALMotion模块,最后介绍了Nao机器人的网络通信系统,主要由ALConnectionManager模块负责。
第三章首先介绍了Kinect,包括Kinect的硬件环境和软件开发环境,之后论述了如何利用Kinect获取人体骨骼数据。
第四章是基于动作交互的机器人手臂动作模仿,介绍了Nao目的虚拟坐标系,并在其之下建立了Nao机器人关节链,还涉及到限幅滤波和滑动平均滤波的数据优化,最后对实验结果进行了简要分析。
第五章对全文进行了总结和展望。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![PC)ZC@0IOBVNQMD%]$2ZKV2](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9567_202021723552267.png)
![}U{ZVRQ35_I`D28NTY]22VY](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9567_202021723552304.png)
![[58O[ZBN2HLDSIZF]K(U@VV](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9567_202021723552354.png)
![G4]FUGS$%`86DHSB8(QE2IJ](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9567_202021723552401.png)