多模式简易智能电动车设计毕业论文
2020-02-17 23:06:03
摘 要
本文设计实现了一种基于STC89C52单片机的多模式简易智能电动车,小车以单片机为核心,它可以实现在三个区域内以三种不同行驶方式进行行驶。在行驶过程中,小车会显示时间,等小车停止之后就会轮流显示小车的行驶时间,行驶距离和行驶时平均速度。它可以应用在高风险探测的场合。本次智能小车的设计所得结果对于智能机器人,智能小车具有重要的指导意义。论文主要研究了智能小车在如何自动循迹,如何通过传感器感测内部和外部环境,如何根据所得数据自动行驶,改变行驶模式。文中的单片机设计软件部分编程采用c语言编写,采用Keil软件开发。小车采用接近开关作为外部检测传感器,可以检测金属。因此采用金属丝作为s弯跑道,用横向金属条作为各个行驶区域之间的标记。当小车检测到横向放置的金属条是就会改变其行驶轨迹以及行驶方式。
关键词:单片机;寻迹小车;金属探测;STC89C52
Abstract
In this paper, a multi-mode intelligent electronic vehicle based on STC89C52 microcomputer is deigned by the author. The corn of the car is this microcomputer and it can dive in three different driving modes in three regions. In the process of driving, the car will show the time. When the car stop, the screen of the car will turns to show the car’s running time, running distance and average speed. It can be used in high-risk situations. The results obtained from the design of intelligent car have important guiding significance for intelligent robot and intelligent car. This paper mainly studies how the intelligent car can automatically track, how to sense the internal and external environment through sensors, and how to drive automatically and change the driving mode according to the obtained data. The microcomputer software is programmed with c language and developed with the Keil software. The car uses mental detection sensor to detect metals. Therefore, the s bend runway is made by mental wire and horizontal metal strip is used as the mark between various driving areas. When the car detects the horizontal mental, it will change its driving path and driving mode.
Key Words:Microcomputer;Tracking car; Metal detection;STC89C52
目 录
第1章 绪论 4
1.1研究目的和意义 4
1.2国内外研究现状 5
1.3 预期目标 6
第2章 多模式智能小车的设计过程 7
2.1 多模式简易智能小车各个模块的设计过程 7
2.1.1 智能小车核心 7
2.1.2 智能小车驱动模块 8
2.1.3 智能小车测速模块 10
2.1.4 智能小车显示模块 12
2.1.5 智能小车循迹模块 13
2.1.6 智能小车的供电模块 14
2.2 系统可行性分析 15
2.2.1 技术可行性 15
2.2.2 经济可行性 15
2.2.3 操作可行性 16
2.3 多模式简易智能小车研究方法 16
2.3.1 智能小车硬件结构设计 16
2.3.2 智能小车硬件结构出现的问题以及改进 17
2.3.3 多模式简易智能小车软件结构设计 17
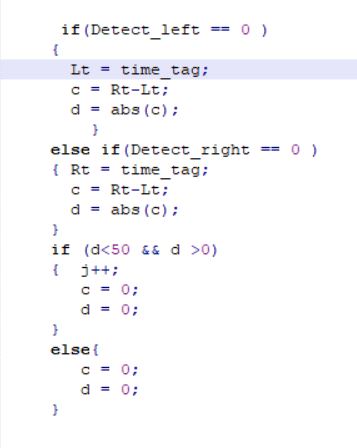
2.3.4 多模式简易智能小车检测横向金属程序设计 19
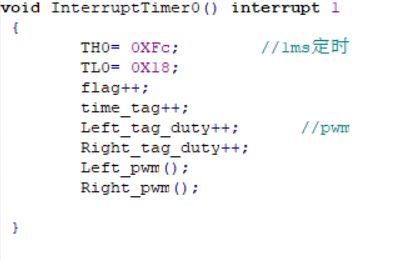
2.3.5 多模式简易智能小车PWM调速程序设计 20
2.3.6 多模式简易智能小车循迹程序设计 21
2.3.5 多模式简易智能小车计数以及显示程序设计 21
第3章 多模式简易智能小车软件和硬件测试 24
3.1 多模式简易智能小车硬件实物模型 24
3.1.1 多模式简易智能小车硬件测试 25
3.1.2 多模式简易智能小车软件测试 25
3.2 测试结果分析以及可以改进的地方 26
第四章 总结与展望 27
4.1 总结 27
4.2 展望 28
第1章 绪论
1.1研究目的和意义
在当今社会处在信息技术高速发展时期,不论在哪个地方、领域都能看到微型控制器的身影。电子医疗,物联网,智能家居,电力控制系统,等领域中微型控制器更是不可缺少的重要部分。微型控制器也就是单片机,它是将计算机的各个部件,各个功能集成在同一张芯片上的嵌入式芯片,在这些年的发展中它的性能也发展的更加强大,它的大小也变得更加迷你,更节省空间。在现在的社会中,很多行业都有很高的危险性,例如地下勘探,抢险救灾,化工产业,但是这些高危行业仍然采用人工方式,这样不仅仅效率低,探查不够仔细,而且工作人员也面临安全问题。如今,单片机芯片价格越来越低廉,传感器的种类和精度稳步上升,电子产品成本逐年降低,制作一种可以在勘探方面代替人工的智能小车从原理,价格等各个方面都是可行的。这样的一种智能小车能在各种环境下自动行驶,并且可以加入不同类型的传感器来应对不同的探测需求,也就是说它的可扩展性很强。
智能小车不同于人类,它不需要休息,如果电池容量满足条件,智能小车可以二十四小时不间断工作,除非小车传感器或者小车芯片出现老化等问题。因此它的工作效率相比较人工来说高了很多,并且在恶劣环境(在充满有毒有害气体的工厂或者是矿洞中)下小车也可以运行,所以它的适用范围很广。而且智能小车成本不高,受到损坏也能快速补充,不会伤害到工作人员的生命,降低了工作人员受伤概率。如今,电子信息产业发展迅速,各类电子产品普及度提高,人们对于这类产品的接受程度也在上升。这就意味着大众能接受这样的产品替代人工,因此这类产品是有市场需求的,是很有发展前景的。工作人员只需要在安全的地带操作小车,用电脑收集小车传来的数据就可以完成以前需要多名工作人员亲临现场,仔细探查的工作。多模式智能小车极大的提高了人们的工作效率,节约了人工成本和时间成本。因此,开发一种能自动探测,行驶的多功能智能小车不仅可以提高工作效率,也可以提高工作人员的安全性。
下面总结一下开发一种多模式简易智能电动小车的目的以及意义:
第一点:智能小车成本不高,并且能适应于各种恶劣环境,不需要休息,工作人员只需要收集数据,因此能极大的提高工作效率。
第二点:对于用户来说,只需要把小车放到入口,小车自己就可以收集数据,并且用屏幕显示,没有任何的难度。
第三点:多模式简易智能小车还可以进一步添加各种特殊传感器,适用于不同的测试环境和需求。小车的发展前景很好。
1.2国内外研究现状
单片机以及嵌入式系统技术自从诞生开始就进入发展迅速阶段,它的发展阶段据时间可划分为四个时期。第一阶段是从1976年到1978年,intel公司推出一款名为MCS-48系列的单片机[1],intel公司首先提出了将CPU以及计算机外围电路集成到一个芯片上的概念,并且它们的研究取得了满意的成果,诞生出了单片机。单片机的诞生改变了当时的格局,也标志的之后几十年的辉煌发展。第二个阶段从1978年到1982年,这是单片机技术逐渐完善的阶段。Intel公司在第一代单片机产品MCS-48系列的基础上进行创新和改进,推出了MCS-51 系列的单片机[1]。对比于前的一代MCS-48单片机,它配置了完善的外部并行总线;规范了寄存器和控制模式;指令系统更加完善和丰富[2];第三个阶段从1983年到1990年,Intel公司继续对单片机进行改进和创新,他们推出的MCS-96型号单片机,他们将A-D转换器、程序运行监视器、脉宽调制器纳入芯片中[3]。第四个阶段从1990年至今随着单片机的性能逐渐强大,各个领域均能看到单片机的身影,并且根据需求的不同,单片机也出现了各种发展方向[4]。
随着各式各样的传感器的出现,智能车的功能不仅仅局限于循迹上。智能小车将会由其内部传感器来感知检测和控制智能小车本身,然后它将会用外部传感器来感知小车外部的环境信息,并对此进行分析和处理,然后进一步做出判断。小车的智能控制系统是一种具有智能信息处理、信息反馈、智能控制、智能决策的控制方式,即小车可以自己处理内部传感器和外部传感器给出的信息并做出智能控制、智能决策的系统[6]。这个智能小车控制系统主要用来解决传统方法难以解决的复杂控制问题。随着智能小车算法的优化,数据处理核心CPU的功能逐渐变强,智能小车可以应用在高危环境下作业,抢险救灾,野外生存等方面并且智能小车的发展也受到了各国领导人的高度重视[7]。
近些年来,国内智能小车发展迅速,小到智能玩具,大到军事探测,各种地方都能看到智能小车的身影[8]。智能小车基本可以实现循迹,避障,速度显示等功能。不仅仅如此,在大学中,有关于智能循迹小车的比赛也层出不穷,飞思卡尔智能小车大赛就是其中很著名的比赛。智能小车比赛要求所有参赛队伍购买电机,红外模块,霍尔元件等元器件,要求自己组装编程,制作出一辆智能小车[9]。所有的队伍都在同一个轨道上进行比赛。跑完一圈用时最短的队伍获胜。
目前,国外对智能单片机小车方面的研究层出不穷,Bass am R.Shae的关于单片机的节能系统研究和Zachary Baker 所做的单片机程序编程稳定性的研究等有很多参考意义与价值。[2]可以预见的是,随着时间的推移,会有无数的人从事相关行业,也造就了相关行业的发展。人工智能、机器学习、深度学习等当下热门领域正在以极高的潜力发展,创新。当这些新鲜技术应用在智能小车上面的时候,肯定会有越来越多的智能小车应用在我们的生活中。智能小车也会有更强大更自主的控制能力[10]。
1.3 预期目标
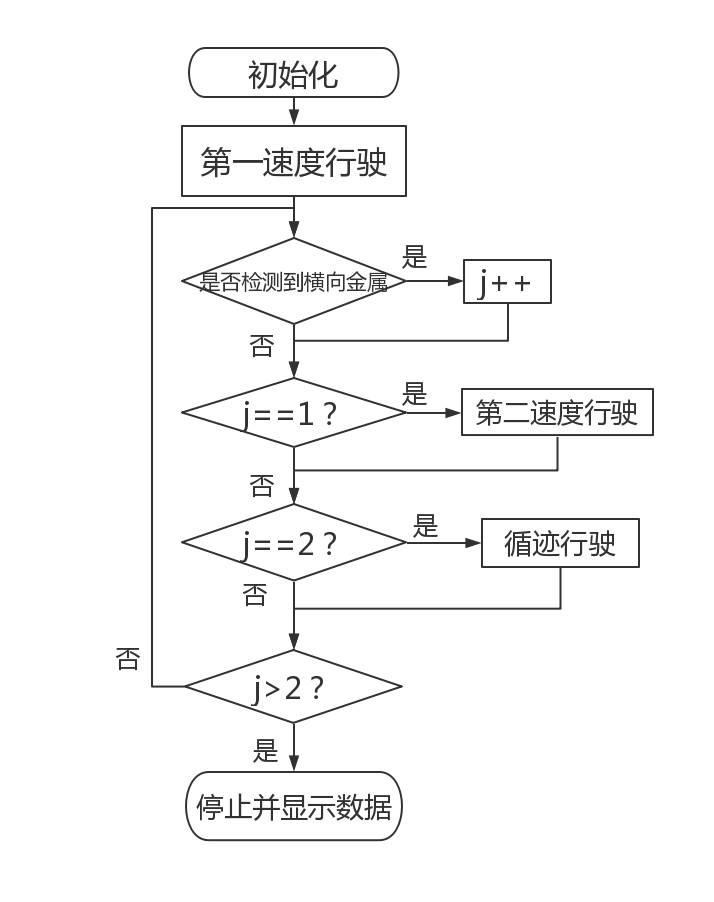
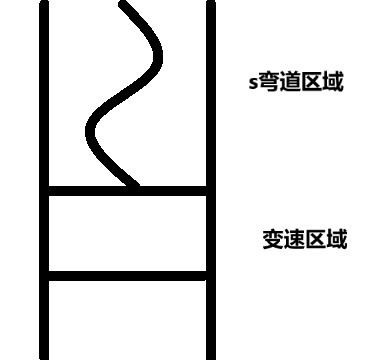 多模式简易智能小车设计的预期目标是制作一个以51单片机为核心的智能小车。要求小车能利用金属感测器来感知地面上的金属轨道,或者金属区域,并把感测到的信号返回单片机,单片机经过运算之后小车按照预定目标以不同模式行驶在各个区域内。预定区域为两个变速行驶区域,和一个s弯循迹区域。具体示意图如图1.1所示。根据预期,小车会先以一种速度行驶过第一个区域,然后当小车检测到横向摆放的金属条时,小车变换速度,变成第二种速度行驶过第二个区域;当小车检测到第二个区域与第三个区域之间的金属条时,小车变成循迹模式,根据金属轨道循迹行驶;当小车行驶过s弯区域时,小车停止。智能小车采用光电传感器加遮光板进行测速。行驶过程中LCD1602屏幕显示小车行驶的时间,当小车行驶过s弯区域时,小车停止并在小车的屏幕上轮流显示出小车在各个区域内的行驶速度,行驶距离和行驶时间。根据预期,将会制作出小车实物和实际金属轨道。
多模式简易智能小车设计的预期目标是制作一个以51单片机为核心的智能小车。要求小车能利用金属感测器来感知地面上的金属轨道,或者金属区域,并把感测到的信号返回单片机,单片机经过运算之后小车按照预定目标以不同模式行驶在各个区域内。预定区域为两个变速行驶区域,和一个s弯循迹区域。具体示意图如图1.1所示。根据预期,小车会先以一种速度行驶过第一个区域,然后当小车检测到横向摆放的金属条时,小车变换速度,变成第二种速度行驶过第二个区域;当小车检测到第二个区域与第三个区域之间的金属条时,小车变成循迹模式,根据金属轨道循迹行驶;当小车行驶过s弯区域时,小车停止。智能小车采用光电传感器加遮光板进行测速。行驶过程中LCD1602屏幕显示小车行驶的时间,当小车行驶过s弯区域时,小车停止并在小车的屏幕上轮流显示出小车在各个区域内的行驶速度,行驶距离和行驶时间。根据预期,将会制作出小车实物和实际金属轨道。
图1.1 小车行驶区域示意图
第2章 多模式智能小车的设计过程
2.1 多模式简易智能小车各个模块的设计过程
2.1.1 智能小车核心
 智能小车的核心是stc89c52单片机。采用这个单片机是因为这个型号的单片机价格低廉,功耗低,性能高。它不仅具有8位CPU和系统可编程的Flash存储器,它还有4个中断,3个定时器,以及32个I/O口[11]。这些优良的硬件条件满足了实验设计的需要。此外,它的工作电压和工作频率非常广泛,制作时比较容易实现。因此智能小车的核心就选用stc89c52单片机。它将收到各个传感器的对外部感知的信号并控制小车的行驶。由于小车不需要市面上购买单片机成品的所有功能,相反本次设计需要很多引脚来控制各个传感器。因此选择单片机最小系统既可以节约资金,也能获得更多更自主的扩展空间。
智能小车的核心是stc89c52单片机。采用这个单片机是因为这个型号的单片机价格低廉,功耗低,性能高。它不仅具有8位CPU和系统可编程的Flash存储器,它还有4个中断,3个定时器,以及32个I/O口[11]。这些优良的硬件条件满足了实验设计的需要。此外,它的工作电压和工作频率非常广泛,制作时比较容易实现。因此智能小车的核心就选用stc89c52单片机。它将收到各个传感器的对外部感知的信号并控制小车的行驶。由于小车不需要市面上购买单片机成品的所有功能,相反本次设计需要很多引脚来控制各个传感器。因此选择单片机最小系统既可以节约资金,也能获得更多更自主的扩展空间。
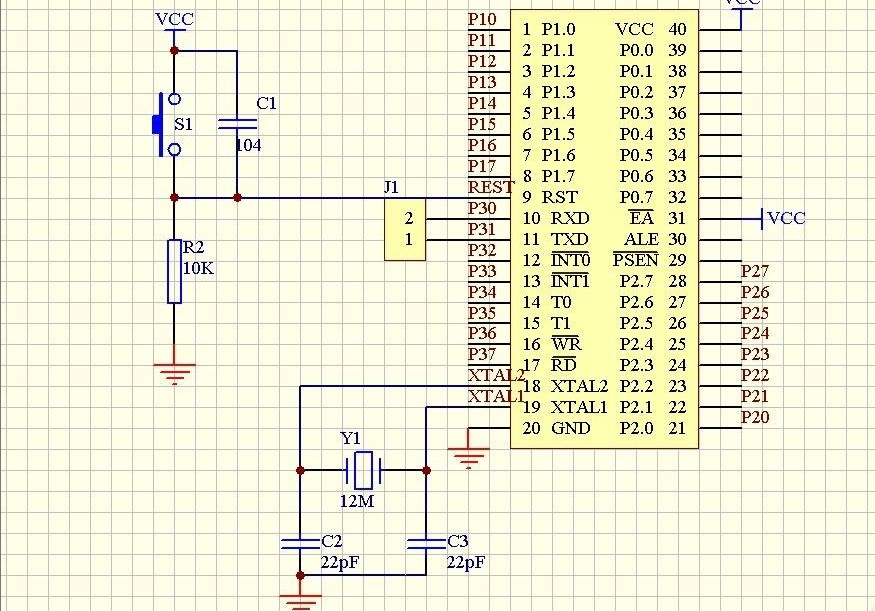
单片机最小系统即单片机最小应用系统[12]。单片机最小系统由单片机芯片,晶振电路,电源电路还有复位电路。电源电路给单片机芯片供电,晶振电路给单片机系统提供基准的时钟信号,复位电路让单片机进行内部的初始化过程。具体电路图如下。
图2.1 单片机最小系统
2.1.2 智能小车驱动模块
智能小车的驱动模块即控速模块。在本设计中,小车需要有转向的功能,所以最少需要两个电机来控制。考虑到性价比等因素,初步方案如图2.1所示,单片机通过I/O口输出信号,由输出信号来控制两个电机的工作,利用电机的速度差来进行转向。为了保持小车的平衡,在小车的后方加入了一个万向轮来垫平小车,使其能平稳行驶。
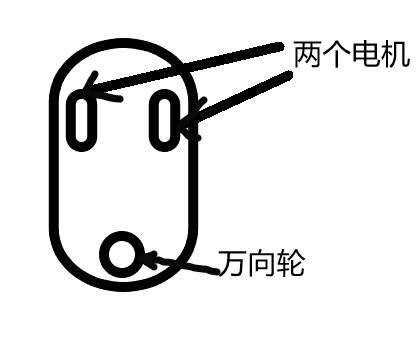
图2.2 小车驱动模块示意图
电机有两种选择方式,一种是用步进电机进行控制,一种是用直流电机进行控制的方式。采用直流电机的话,使用L298N芯片模块(如图2.2)进行控制,L298N芯片原理简单,可以用单片机I/O口控制,可靠性高,并且带有散热片,其原理图如图2.3所示。它调节车速的原理是通过控制使能端输出电流来控制车速,使用这种方法的好处是,电机连续性好,电机价格便宜,缺点是不能精准控制。无法进行特定角度的旋转。采用步进电机的话,不需要用芯片来控制,直接用单片机I/O口来控制旋转角度。这种方案的优点是可以对电机进行精准操控,但是电机的连续性不好。而且电机较大,不好安装。经过比较,最后决定在智能小车上装上直流电机和L298N控制芯片作为整个智能小车的驱动模块。
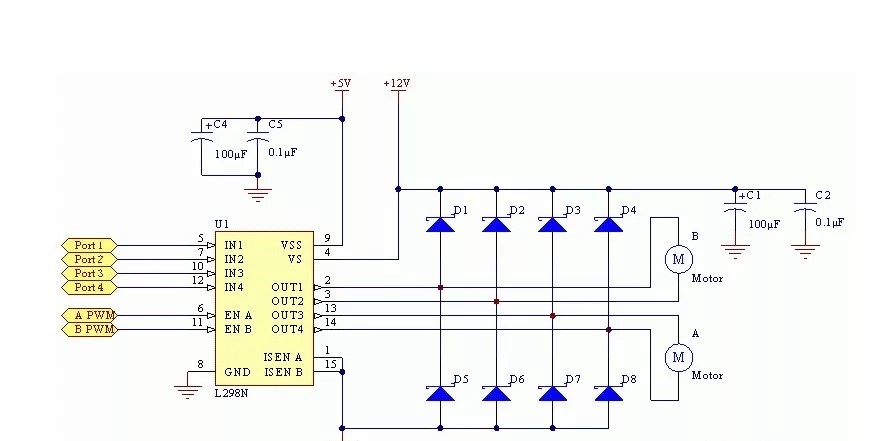 图2.3 L298N原理图
图2.3 L298N原理图
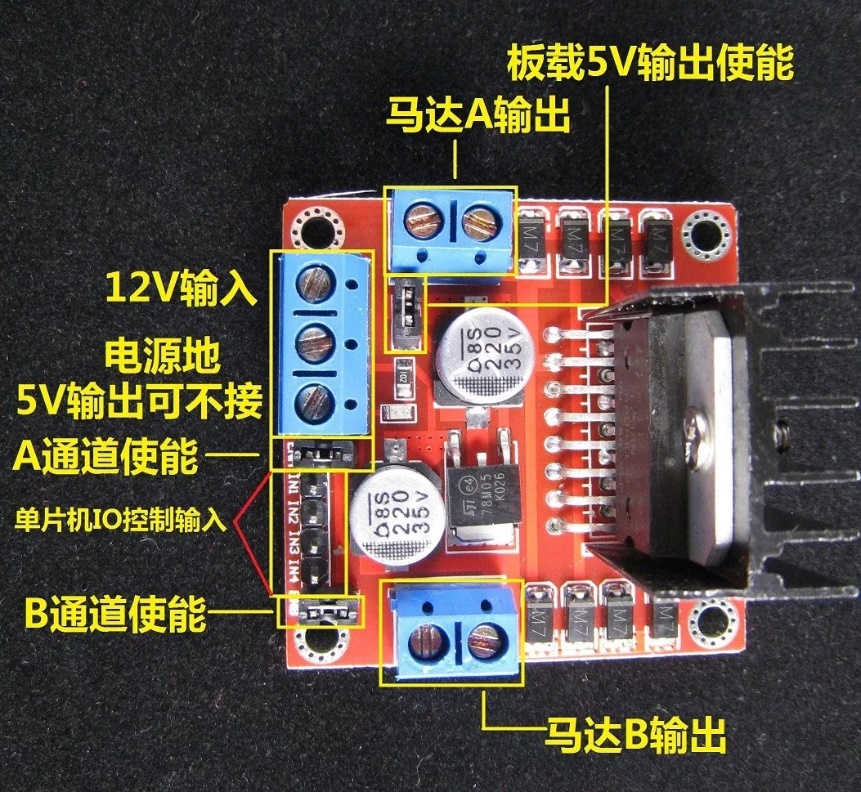
图2.4 L298N实际图片
2.1.3 智能小车测速模块
 智能小车的测速模块由测速元件组成。第一种方法是采用霍尔元件进行测速,霍尔元件图片如下所示。使用霍尔元件的具体做法是:在小车车轮固定一个磁铁,或使用其他装置让小车轮毂旋转的时候磁铁也随之以固定速度旋转。当磁铁转动时,霍尔元件附近磁场发生变化,引发霍尔效应,依据这个原理霍尔元件就可以根据磁场的变化发出不同的信号。即当磁场接近霍尔元件时,霍尔元件将会输出信号,当霍尔元件感应不到磁场时将不会输出信号。这样我们就可以得到一个方波。我们的测速原理就是根据一秒钟霍尔元件发出的信号中上升沿的个数来测出一秒钟内小车转轴所转的圈数,因此可以测量小车车轮的速度。由于霍尔元件输出信号不稳定,无法直接作为计数信号。因此使用霍尔元件时需要加入LM393电压比较器来输出,这样会改善测速模块输出信号,增强其驱动能力。
智能小车的测速模块由测速元件组成。第一种方法是采用霍尔元件进行测速,霍尔元件图片如下所示。使用霍尔元件的具体做法是:在小车车轮固定一个磁铁,或使用其他装置让小车轮毂旋转的时候磁铁也随之以固定速度旋转。当磁铁转动时,霍尔元件附近磁场发生变化,引发霍尔效应,依据这个原理霍尔元件就可以根据磁场的变化发出不同的信号。即当磁场接近霍尔元件时,霍尔元件将会输出信号,当霍尔元件感应不到磁场时将不会输出信号。这样我们就可以得到一个方波。我们的测速原理就是根据一秒钟霍尔元件发出的信号中上升沿的个数来测出一秒钟内小车转轴所转的圈数,因此可以测量小车车轮的速度。由于霍尔元件输出信号不稳定,无法直接作为计数信号。因此使用霍尔元件时需要加入LM393电压比较器来输出,这样会改善测速模块输出信号,增强其驱动能力。
图2.5 霍尔元件实际图片
另一种方法是采用光电测速传感器,光电测速元件如图所示。光电测速元件使用前需要先固定一个遮光板在小车电机轴承上,当小车跑动时,电机转轴转动,然后遮光板跟随电机转动,遮光板上有规律的孔洞,当遮光板遮挡住光电耦合器的时候,传感器便可以感知到被遮挡,并输出信号。当遮光板的孔洞对着光电耦合器的时候传感器不会输出信号。因此我们同样可以根据传感器输出的波形来测量小车的车速[13]。
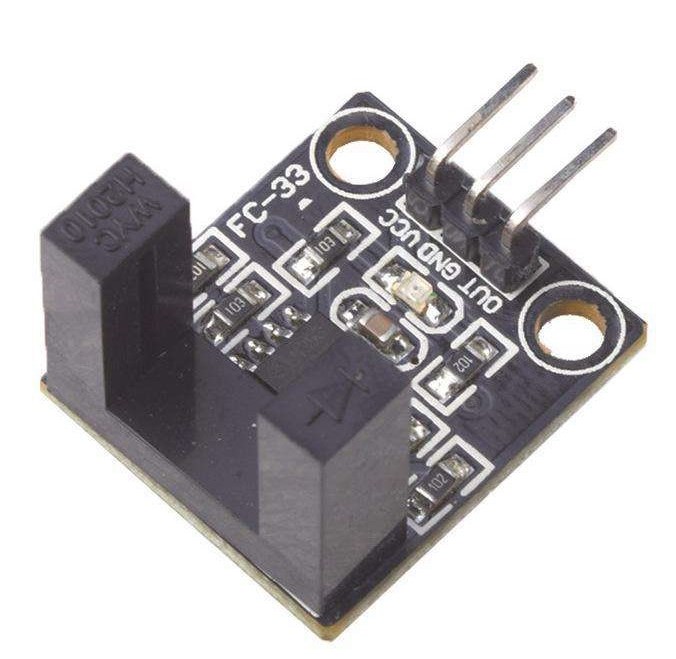
图 2.6 光电测速传感器实际图
对比两种元器件测速的方式,由于轮毂很难附着磁铁,即使固定好也存在稳定性问题,容易脱落。而使用光电传感器则需要在小车电机转轴上放置遮光板,这种方式相比较之前固定电阻的方法更加稳定,测量更加精准。此外,光电传感器所需要的空间比霍尔元件所要空间小,可以安装的位置多。而霍尔元件测速需要更大的位置,可能无法在小车上安装。从测量方式来说,采用测量上升沿个数的方法针对输出信号高低电平变换越多的传感器测量越精确。遮光板上面有很多孔洞,小车车轮转一圈传感器就能感知到多次被遮挡。而如果采用霍尔元件的话,电压变化的个数相对较小,所以光敏元件比霍尔元件在小车上更容易安装,容易测速。从使用者的角度来说,霍尔元件使用复杂,需要使用者设计电路,添加电压比较器。而槽型光电测速传感器已有测速模块,方便使用者使用,直接插拔,无需焊接,可以直接购买。从元器件价格上来说,霍尔元件与光电传感器的价格都很低,选择哪一种测量方式都在预算范围之内[14]。从传感器稳定性来说,霍尔元件的稳定性相比于光电传感器来说更加稳定。它可以在各种恶劣的环境下工作,不怕灰尘,油污,水汽等环境,而光电传感器需要由障碍物遮挡才能测速,所以当有杂物挡住传感器的时候,不能很好的测速。但此次设计的小车工作在相对稳定,适宜的环境下,所以光电传感器的缺点不太会显露出来。综上所述,使用光电测速模块相比于霍尔元件测速来说更好[15]。
2.1.4 智能小车显示模块
 智能小车的显示采用LCD液晶屏幕来实现。智能小车需在行驶过程中显示时间,并在停止时显示平均车速,距离,各段行驶所需要的时间。根据设计方案,LCD液晶屏幕的显示内容不占很大空间。因此显示模块采用LCD1602液晶显示屏幕。如图2.7和2.8所示。
智能小车的显示采用LCD液晶屏幕来实现。智能小车需在行驶过程中显示时间,并在停止时显示平均车速,距离,各段行驶所需要的时间。根据设计方案,LCD液晶屏幕的显示内容不占很大空间。因此显示模块采用LCD1602液晶显示屏幕。如图2.7和2.8所示。
图2.7 LCD1602液晶屏幕正面图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: