自动驾驶通用执行机构结构设计毕业论文
2020-02-18 10:43:39
摘 要
车辆试验和检测一般有道路测试和在转鼓上进行的原地测试,涉及汽车的动力性、排放性、耐久性、经济性等试验。试验中对车辆的操作大部分需要高度重复性,这部分工作难以完全依靠人力完成。使用自动驾驶机器人驾驶车辆完成试验重复性高或者试验精度要求高以及可能危及人身安全的试验,有显著优势。在自动驾驶汽车系统组成当中,除了自动驾驶系统以外,还需要执行具体控制指令的执行机构,例如驾驶机器人的机械手、机械腿部分。基于以上背景,本文设计了一种汽车自动驾驶的通用执行机构,可牢固安装在车辆中配合自动驾驶系统代替人类驾驶员进行汽车测试等实际测试应用,促进汽车试验中高度自动化的智能设备研发,辅助进行汽车性能试验以期达到更好的试验效果。
本文依据自动驾驶机器人执行部分的要求及技术指标,并且针对执行机构不能影响驾驶员自由操作的使用条件,将执行机构设计为电机驱动摇杆的结构形式。设计的执行机构通过“R形”安装结构实现执行机构在车辆中的无损安装。本文使用Creo软件建立了机构的三维模型并对所设计的机构进行了运动仿真。最后根据设计需求选择了合适的驱动电机。设计所得结果符合预期设计目标。
关键词:自动驾驶;执行机构;踏板机械腿
Abstract
Vehicle testing and testing generally include road testing and in-situ testing on drums, involving vehicle power, emission, durability, economy and other tests. The operation of the vehicle in the test mostly needs high repeatability, which is difficult to complete completely by manpower. The use of automatic driving robots to drive vehicles to complete tests with high repeatability or high test accuracy and possibly endangering personal safety has very prominent advantages. In the composition of the automatic driving system, besides the automatic driving system, it is also necessary to execute specific control instructions, such as the manipulator and the mechanical leg part of the driving robot. Based on the above background, this paper designs a general executive mechanism for automatic driving of automobiles, which can be installed in vehicles with automatic driving system instead of human drivers for practical testing applications such as vehicle testing, so as to promote the development of highly automated intelligent equipment in automobile test, and assist in vehicle performance test in order to achieve better test results.
In this paper, according to the requirements and technical specifications of the executive part of the automatic driving robot, and in view of the operating conditions that the actuator can not affect the driver's free operation, the actuator is designed as the structure of the motor-driven rocker. The non-destructive installation of the actuator in the vehicle is realized by the "R" installation structure. In this paper, the three-dimensional model of the mechanism is established by Creo software, and the motion simulation of the mechanism is carried out. Finally, the appropriate driving motor is selected according to the design requirements. The design results are in line with the expected design objectives.
Keywords: Autopilot; actuator; mechanical leg
目录
第1章 绪论 1
1.1 研究背景和意义 1
1.1.1 自动驾驶通用执行机构简介 1
1.1.2 自动驾驶通用执行机构在汽车产业中的应用 1
1.2 国内外自动驾驶执行机构的发展历史与趋势 2
1.2.1 国外自动驾驶执行机构发展历史与趋势 2
1.2.2 国内自动驾驶执行机构发展历史与趋势 3
1.2.3 国内外自动驾驶执行机构发展历史与趋势总结 3
1.3 课题的主要研究内容 4
1.3.1基本内容 4
1.3.2设计目标 4
1.3.3设计方案 4
第2章 执行机构设计介绍 5
2.1 执行机构的设计要求 5
2.1.1 安装适应性 5
2.1.2 踏板速度控制 5
2.1.3 踏板位置控制 5
2.2 执行机构的结构构成 6
2.3 机构设计工具介绍 7
2.4 驱动方案分析 8
2.4.1 驱动方案 8
2.4.2 驱动电机的特点及选型 9
2.5 本章小结 11
第3章 执行机构结构设计 12
3.1 踏板特性 12
3.1.1 离合踏板特性 12
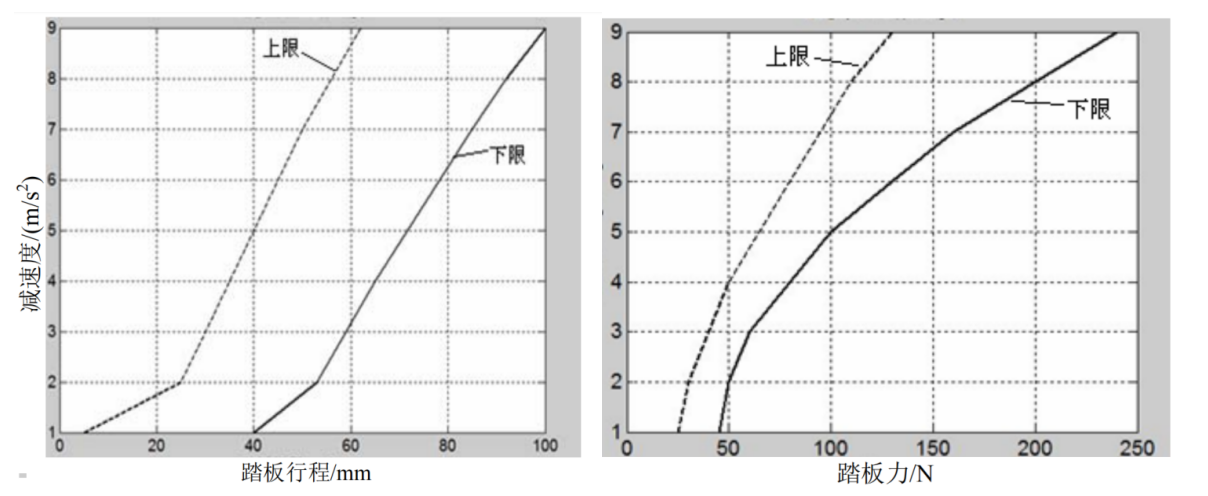
3.1.2 制动踏板特性 12
3.1.3 加速踏板特性 14
3.2传动机构设计 15
3.2.1传动方式 15
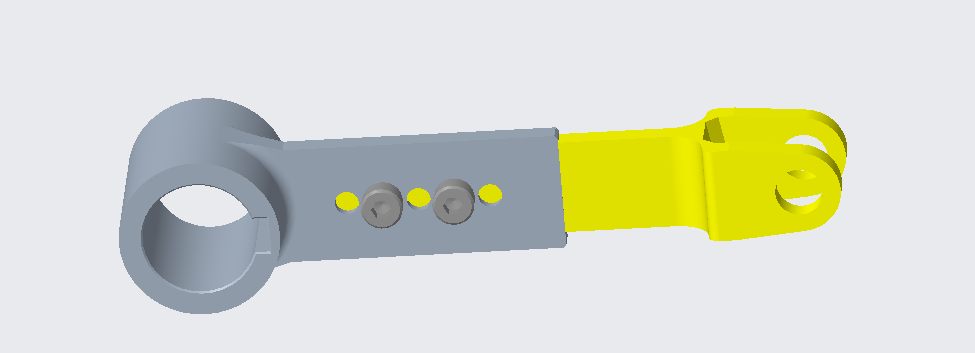
3.2.2 摇杆设计 17
3.2.3 连接杆设计 18
3.3 踏板夹紧机构设计 18
3.3.1踏板夹正面片设计 19
3.3.2 固定条设计 19
3.4安装机构设计 22
3.4.1车内安装条件 22
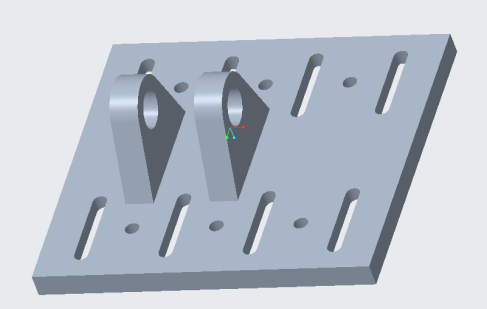
3.4.2 安装机构设计 24
3.5 本章小结 26
第4章 执行机构仿真分析 27
4.1 仿真模型参数设定 27
4.2 执行机构运动学仿真过程 28
4.3运动学仿真结果分析 33
4.4本章小结 33
第5章 驱动电机选型 34
5.1电机选择方法 34
5.2参数确定 35
5.3本章小结 35
第6章 总结与展望 36
6.1 结论 36
6.2 展望 36
参考文献 37
致谢 39
第1章 绪论
1.1 研究背景和意义
1.1.1 自动驾驶通用执行机构简介
自动驾驶汽车是无需驾驶员进行操控及可自行完成目标行驶任务的汽车,与传统汽车的核心区别是在车内装载了自动驾驶系统,通过识别传感器信号进行环境感知,自动驾驶系统输出信号控制执行机构完成对汽车的操控。
在自动驾驶汽车的更新迭代历程中,车内装载的自动驾驶系统的主要功能为通过程序算法对实时数据处理并准确地向执行机构输出控制信号。自动驾驶系统的多元信息整合处理能力是影响汽车智能化的一个重要条件。且作为自动驾驶汽车的核心,自动驾驶汽车进行环境感知、行车道路规划还有逻辑决策等智能化操作的基础都依赖于自动驾驶系统。目前,有关自动驾驶的技术例如感知、路径规划等都取得了长足发展,这使得可预见的智能化出行与我们的现实生活更加接近。
在自动驾驶汽车系统组成当中,除了自动驾驶系统以外,还需要执行具体控制指令的执行机构,例如驾驶机器人的机械手、机械腿部分。作为动力输出的部分,执行机构充当的是角色相当于人的手脚,与实际控制车辆方向和速度的方向盘、制动踏板、加速踏板等直接接触。
适用于车辆自动驾驶系统的通用型踏板控制执行机构,可于自动驾驶系统在实车试验当中作为输出信号的执行部分,通过执行结果分析检验、改进驾驶系统的相关设计。执行机构能够连接驾驶系统,响应控制信号产生针对汽车踏板的目标动作并反馈监测信号从而实现闭环控制。能够广泛使用在汽车试验、自动驾驶系统开发等实际应用中。
1.1.2 自动驾驶通用执行机构在汽车产业中的应用
在汽车产业中,车辆所有的零部件以及整车在研发阶段都必须经过全面的检测试验,获得行业标准中规定的各项性能参数,借此改进设计以满足设计需求。获得合适的数据有赖于大量在各种试验设备配合下进行准确的检测。
车辆试验和检测一般有道路测试和在转鼓上进行的原地测试,涉及汽车的动力性、排放性、耐久性、经济性等试验。试验中对车辆的操作大部分需要高度重复性,例如在对某零件、某系统或某项功能的特性检测或耐久性试验中,试验重复次数可高达数十万次,连续时长甚至可长达数天甚至数月[1]。这部分工作难以完全依靠人力完成。人类驾驶员在较为不适的试验车环境下连续长时机械式重复操作极容易发生消极情绪,甚至崩溃;另一方面,人工操作易疲劳且不可靠,在要求操作一致性较高的试验中容易降低结果精度,相比机械有更大可能出现错误性操作,降低测试结果的可靠性。
使用自动驾驶机器人驾驶车辆完成试验重复性高或者试验精度要求高以及可能危及人身安全的试验,有十分突出的优点。一般而言,机器人可以在设计范围内高质量完成不计疲劳的高度重复驾驶动作,例如驾驶车辆进行疲劳测试、耐久测试、底盘避震测试等。在要求高精度结果的测试中,驾驶机器人可轻松实现准确的定速巡航,驾驶油耗控制等。在应用于高风险测试时,如碰撞测试,ABS制动测试,安全气囊测试等,可以避免真人驾驶时可能出现的人身安全意外伤害。
自动驾驶机器人不是孤立的系统组成,而是借助激光雷达定位系统、图像识别系统、人工智能AI信息处理系统等辅助感知与决策,实现车辆控制的无人化,智能化。自动驾驶机器人通过控制执行器对车辆的方向盘和踏板等原有控制结构改造或者直接进行操作,以达到驾驶车辆的目标。自动化等级较高的自动驾驶机器人已经可以控制车辆在特定环境或路径中执行诸如客运,运输,检测等功能和任务,例如城市快速中转,景区摆渡车,矿区自动运输载体等。
现在,越来越多的自动驾驶机器人能够替代人类驾驶员完成枯燥、疲劳、危险等条件下的驾驶操作。伴随着行业发展的趋势,自动驾驶的执行机构更显出重要性,而复杂多变的使用场景要求其适应调整的能力越来越高。
基于以上背景,本文设计了一种汽车自动驾驶的通用执行机构,可牢固安装在车辆中配合自动驾驶系统代替人类驾驶员进行汽车测试等实际测试应用,促进汽车试验中高度自动化的智能设备研发,辅助进行汽车性能试验以期达到更好的试验效果。
1.2 国内外自动驾驶执行机构的发展历史与趋势
1.2.1 国外自动驾驶执行机构发展历史与趋势
自20世纪80年代开始,国外的研究者就对开发自动驾驶机器人技术做了许多工作。目前,欧美国家一些技术先进的测试仪器研发制备公司把控着自动驾驶机器人领域内的大部分核心技术,例如德国公司STAHLE和WITT ,英国公司 Froude Consine和Anthony Best Dynamics(ABD)以及美国公司LBECO等等[2]。
最初,自动驾驶机器人只是为了取代人类驾驶员在一些危险环境进行操作。如今,受到以特斯拉为代表的全球各大公司高度重视的自动驾驶技术愈加成熟,使用范围也越来越大,有关自动驾驶和智能汽车的技术更是层出不穷。与工业生产的智能汽车稍有不同,目前的驾驶机器人仍是以汽车试验为主,并非整车消费产品,逐渐发展成为有自动控制系统、机械手、机械腿等组成,对车辆原有控制结构进行仿人操作的模块化试验设备,并可用于某一功能单独测试或多功能的组合测试。
不同机构所研发的自动驾驶机器人侧重点各有不同。例如,英国ABD公司开发了用于提升精确特性试验准确度和实现高重复性试验的汽车测试机器人,它可使一些由人类驾驶员难以轻松实现的测试变得容易,并且降低了测试风险,节省测试时间的同时实现完整、准确的试验数据采集。
该系列机器人可以单独使用,也可以与更复杂的测试设备结合使用,例如实现转弯、换道、加速和减速等较复杂的操作。它的设计理念是,避免改动车辆内部原有结构或零件即可将机器人安装在车辆当中,并且当安装设备后,允许驾驶员坐在车辆中通过手动模式直接正常驾驶。该系列的驾驶机器人均由车辆电池供电的电机驱动。自动驾驶系统使用根据Windows系统开发的人机交互软件,所以通过安装在笔记本电脑或平板电脑即可设置机器人。为了保持机器人连续、稳定、可靠的实时控制,该系列驾驶机器人通过一个独立的伺服控制器执行操作,并可通过数据接口直连计算机对控制器进行调试。
1.2.2 国内自动驾驶执行机构发展历史与趋势
进入1990年代后,国内才真正开始研究关于用于自动驾驶的机器人技术,技术发展和积淀的时间至今仍不足三十年[2]。但是信息化时代的今天,作为全球最大的汽车消费国家,能够站在巨人肩上的国内研究者不懈努力,技术进步较快。国内的高校在相关领域取得的成绩主要集中在智能车辆的研究上,如驾驶系统研发。用于汽车测试的机器人设计仍比较少但也有突出成绩。其中,机器人设计的优秀项目是南京汽车研究所与东南大学共同研究开发的DNC系列驾驶机器人[3],从驱动方式上可以看出该系列机器人进步迭代的发展轨迹:其中DNC-1型为全气动, 在第二代技术升级为气电混合驱动, 第三代的DNC-3型则实现了全电动驱动。
1.2.3 国内外自动驾驶执行机构发展历史与趋势总结
目前,国外在自动驾驶领域内技术领先,具有长期积累的深厚技术底蕴,并且建立了一定的技术壁垒,一定程度上增加了国内自动驾驶机器人相关研究机构技术推广和更新的困难。国内经过近年的发展已经有较好发展基础,但是在核心技术上落后且差距明显,仍需要加快自主研发,打破国外同行在核心技术上持续垄断的僵局。目前就技术引入而言,高昂的成本让驾驶机器人仍然很难走向商业化使用。对于驾驶机器人的执行机构,国内未形成规模化的研发机构去专注于研发自动驾驶机器人,而是集中于操作系统的开发,缺乏对仿人操作的自动驾驶机构实体的研究。
1.3 课题的主要研究内容
1.3.1基本内容
本课题研究设计一种汽车自动驾驶通用执行机构,用于汽车试验自动驾驶中的制动踏板控制动作执行。主要内容包括以下三个部分:
(1)机械结构设计
对系列车型的驾驶空间、踏板结构等进行调查,设计执行机构的机械结构以及安装布置方式;
(2)机械结构分析
对设计的机械结构进行运动仿真分析;
(3)驱动部件选择
查阅资料了解相关部件特点,并结合本课题设计机构实际需要进行匹配,最终确定选用的驱动部件。
1.3.2设计目标
(1)执行机构的动力输出满足设计要求;
(2)执行机构的结构设计满足运动要求;
(3)执行机构速度可控;
(4)执行机构的安装固定具备一定灵活性。
1.3.3设计方案
(1)驱动方式与结构设计
查阅相关资料,根据设计需求,在对比液压驱动、气压驱动、纯电驱动等方式后选择驱动方式,并设计与之匹配的机械结构;
(2)踏板位置及踏板力反馈
机构中将分别设计位置传感器和力传感器的安装位置,组成反馈单元向控制系统反馈机构中踏板的位置和踏板力信号;
(3)安装固定
在调研了解踏板结构及运动规律后,选择执行机构的合理安装固定方式。
第2章 执行机构设计介绍
2.1 执行机构的设计要求
2.1.1 安装适应性
执行机构要满足不同车型驾驶室的安装条件,进行牢固可靠的安装固定,且不对车内原有设备、环境造成损伤、改造、更换等操作。因此,车内环境的适应性要经得住不同车型驾驶室安装条件的考验。
2.1.2 踏板速度控制
汽车试验、自动驾驶系统研发等实际应用中, 无论控制加速踏板、制动踏板或者离合踏板都需要实现踏板运动速度的控制,从而实现发动机转速、车辆速度、离合器结合程度等控制目标。所以,执行机构应具备接收上层控制系统信号而改变踏板速度的一定能力。
2.1.3 踏板位置控制
根据踏板的控制要求,执行机构需要对踏板全行程中任一位置的动力输出,实现踏板在全行程任意位置的停留或运动状态改变。所以,执行机构应具备接收上层控制系统信号而改变踏板行程位置的一定能力。
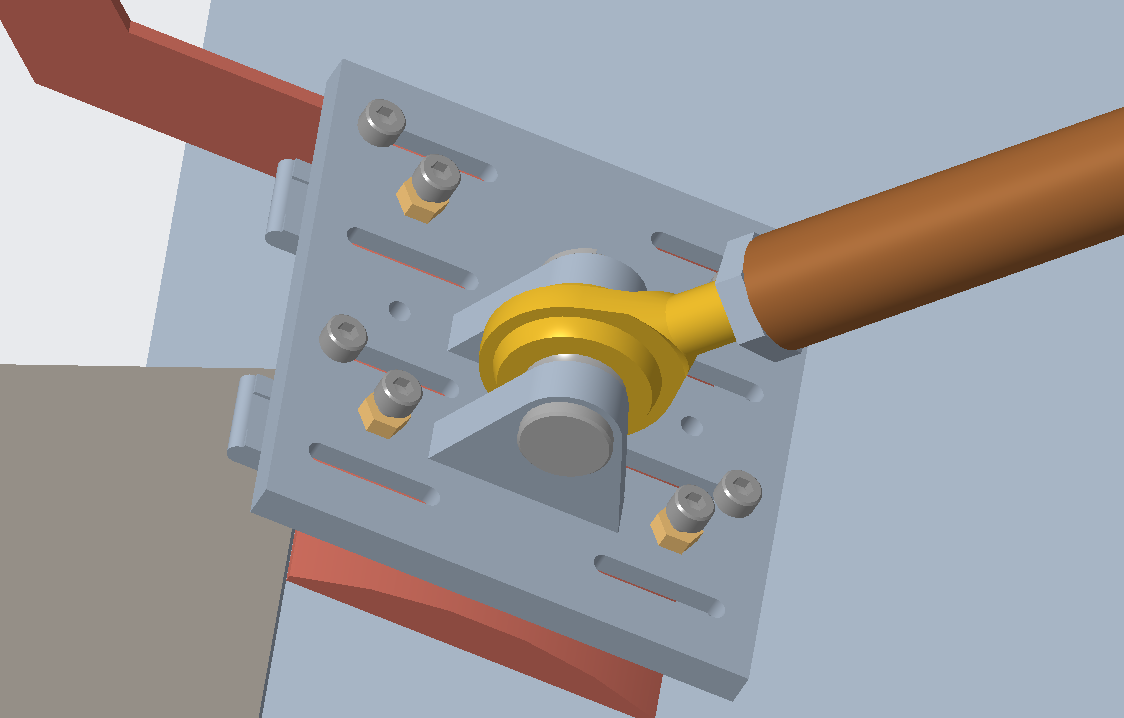
2.2 执行机构的结构构成
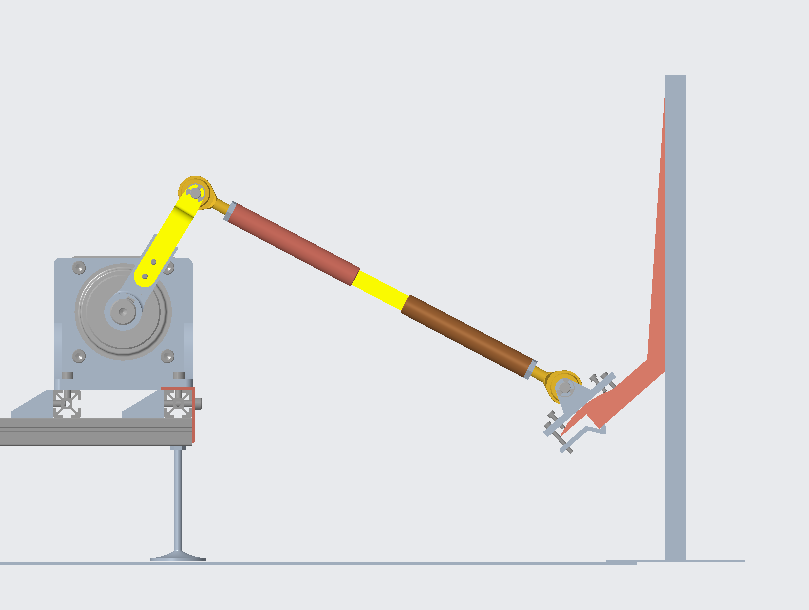
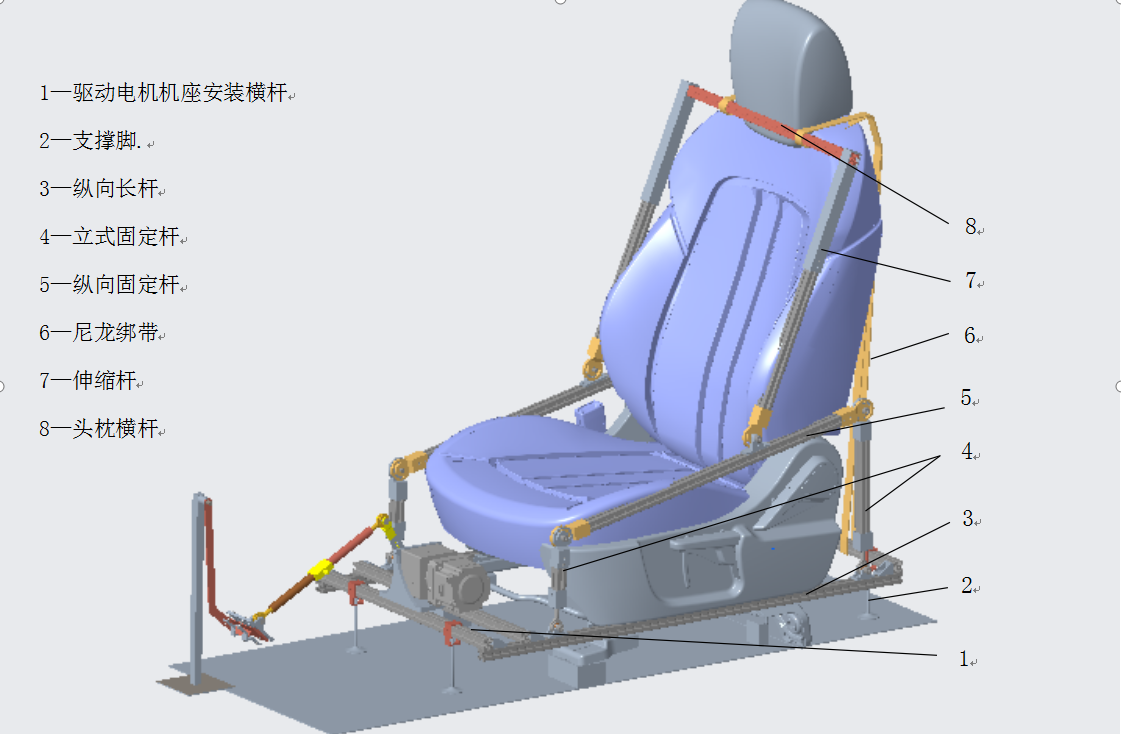
执行机构由驱动电机、传动机构、踏板夹紧机构、安装机构、传感器等五部分构成,其中驱动电机与减速机、传感器结合相关机构设计要求进行选型搭配。 车辆的加速和制动以及离合踏板基本相同,运动规律都可以简化为杆件绕轴转动,因此作为通用型执行机构,可在调整动力输出以及安装尺寸后适应用于加速、制动和离合器踏板的控制操作。执行机构通过安装固定架与驾驶员座椅紧密结合,在车辆行驶以及执行机构动作时与驾驶员座椅相对固定,用来作为执行机构整体的固定基座。执行机构可单独应用于某一踏板的控制运动,也可以排列固连在基座上,同时进行全踏板控制。
图2.1 执行机构工作方式

2.3 机构设计工具介绍
进入信息时代以来,CAD(计算机辅助设计)技术在现代制造业中得到了深入的应用和发展,高效能的设计工作为工业设计、制造等行业价低了成本,增加了巨大产值。CAD作为以计算机为核心的电子设计工具,将设计软件作为实际工作空间,工程师所设计的产品可以通过电子屏幕展示出来,复杂的计算可通过计算机强大的数据处理能力高效完成。传统手工绘图和数据演算步骤烦琐、费时、低效,往往只能以较低的精度完成结果。CAD技术突出了计算机在绘图和演算方面的能力,设计过程上极大地降低了人力投入,将整个产品的研发周期压缩,同时高效能的工作使交付的设计产品质量大大提升。随着CAD技术愈加成熟,现在愈加广泛适用于各类设计行业,并成为工业生产中设计环节的核心技术工具。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: