基于滑模控制的永磁同步电机直接转矩控制系统研究毕业论文
2020-02-18 11:05:51
摘 要
永磁同步电机具有功率密度大,抗干扰能力强,运行可靠且体积不大,效率高等许多优点,使得永磁同步电机被广泛地使用在工业生产、日常生活、军事应用等各种领域。而永磁同步电机的控制方式也因此受到越来越多的专业人员的研究。在实际使用中发现,直接转矩控制始终存在着转矩与磁链波动过大等缺点,这种波动会给电机的稳定可靠运行带来很大的影响。
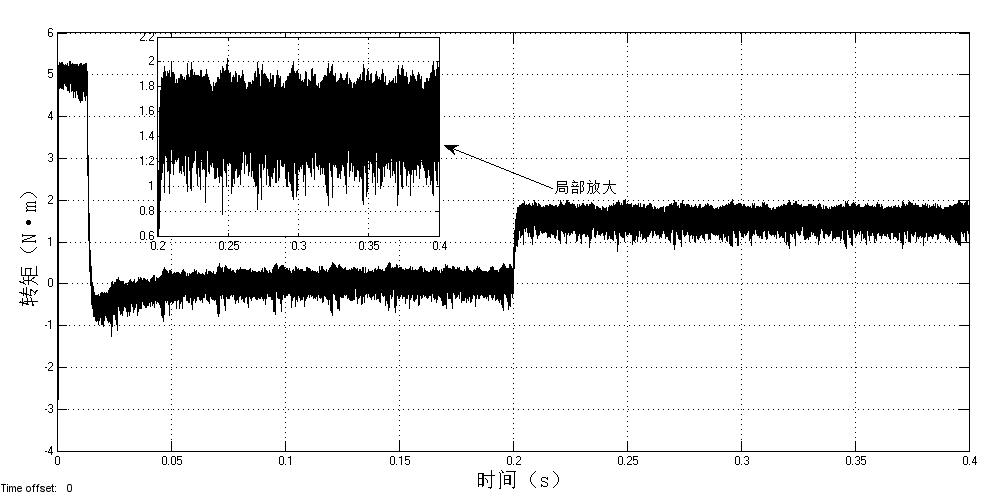
本文通过针对传统直接转矩控制系统的缺点,对一种基于滑模控制的改进型直接转矩控制系统进行研究,并详细介绍两种控制系统的原理与Simulink仿真模型,在经过对传统控制系统和改进的控制系统两种直接转矩控制系统的仿真与对比分析,发现基于滑模控制的改进型直接转矩控制系统能够很大程度地减小电机电磁转矩的波动,并且具有较高的动态响应性能和较强的抗负载扰动能力。
关键词:三相永磁同步电机;直接转矩控制;滑模控制;MATLAB/Simulink仿真
Abstract
Permanent magnet synchronous motor (PMSM) has many advantages, such as high power density, strong anti-interference ability, reliable operation, small volume and high efficiency. PMSM is widely used in industrial production, daily life, military applications and other fields. The control method of permanent magnet synchronous motor is also studied by more and more professionals. In practical use, it is found that the direct torque control always has some shortcomings, such as excessive fluctuation of torque and flux linkage, which will have a great impact on the stable and reliable operation of the motor.
In view of the shortcomings of traditional direct torque control system, this thesis studies an improved direct torque control system based on sliding mode control, and introduces the principle of the two control systems and Simulink simulation model in detail. After the simulation and comparative analysis of the traditional control system and the improved control system, it is found that the improved direct torque control system is based on sliding mode control. The advanced direct torque control system can greatly reduce the electromagnetic torque fluctuation of the motor, and has high dynamic response performance and strong anti-load disturbance ability.
Key Words:three-phase permanent magnet synchronous motor; direct torque control; sliding mode control; MATLAB/Simulink simulation
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究背景和意义 1
1.2 永磁同步电机发展概况 1
1.3 直接转矩控制发展概况 2
1.4 基于滑模结构的直接转矩控制发展概况 4
1.5 主要研究内容 5
第2章 永磁同步电机直接控制系统 6
2.1 三相永磁同步电机直接转矩控制系统结构 6
2.2 三相电源逆变器原理 7
2.2.1 三相电压逆变器原理 7
2.2.2 电压矢量分布 7
2.2.3 电压矢量对磁链的影响 8
2.3 坐标变换 9
2.3.1 ABC坐标系下电机模型 9
2.3.2αβ坐标系下电机模型 10
2.3.3 dq坐标系下电机模型 10
2.4 电机磁链、转矩与磁链空间位置角计算 11
2.5 滞环控制器 12
2.6 开关表 13
2.7 本章小结 13
第3章 传统直接转矩控制系统建模与仿真 14
3.1 转速环PI控制器 14
3.2 坐标转换模块 14
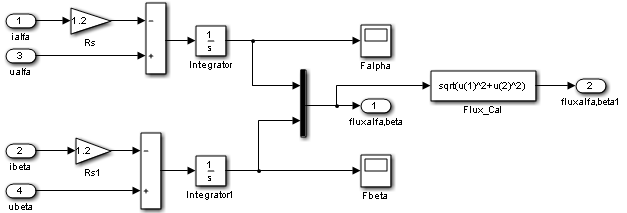
3.3 磁链观测模块 15
3.4 位置角计算与扇区判断 15
3.5 开关表 15
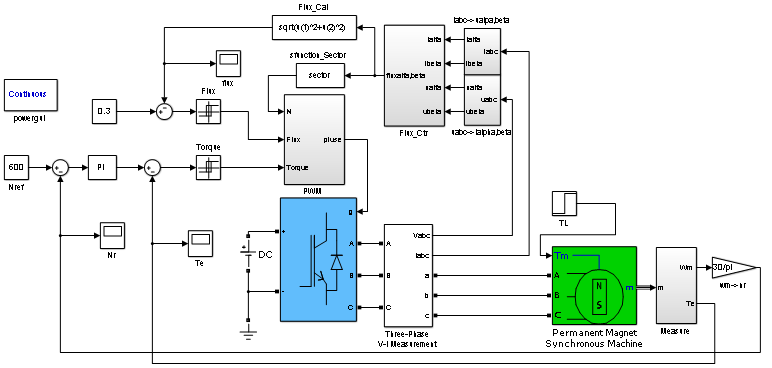
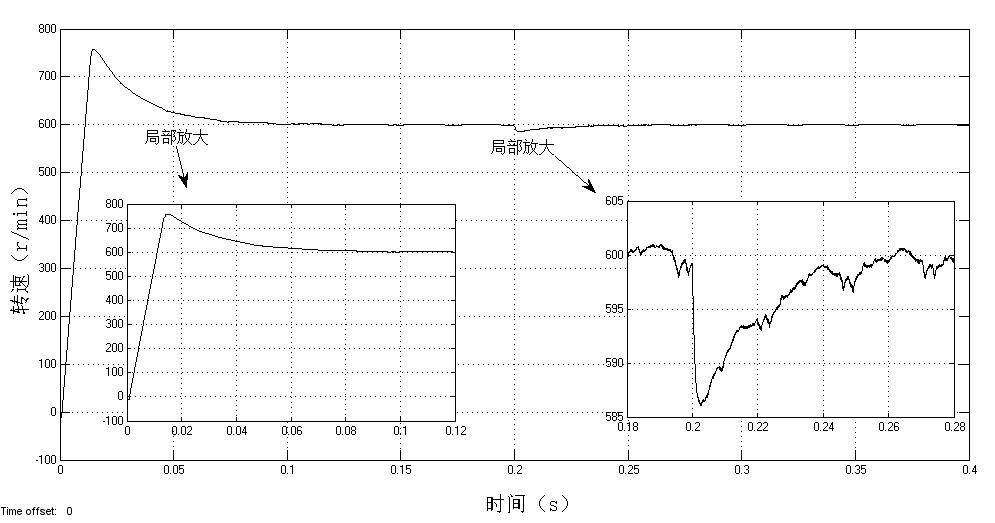
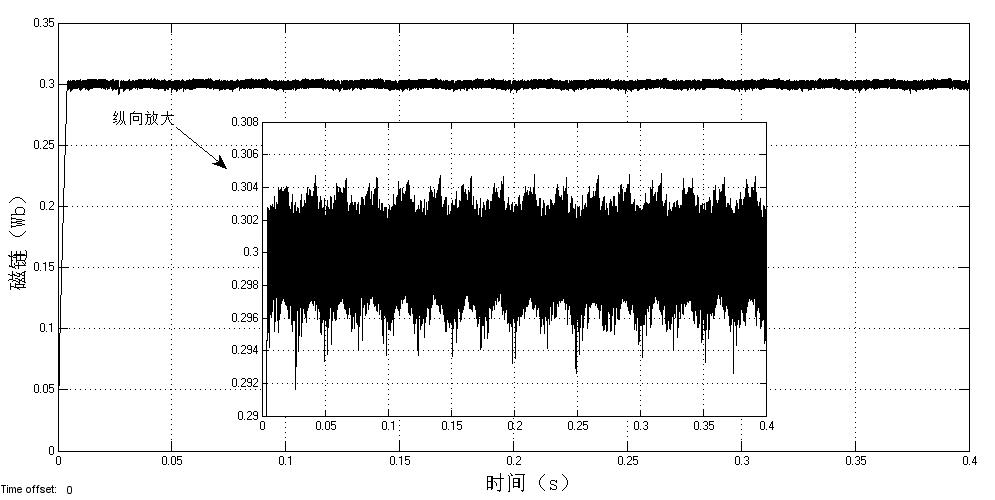
3.6 系统仿真及分析 16
3.7 本章小结 18
第4章 基于滑模控制的直接转矩控制系统研究 19
4.1 滑模控制的原理 19
4.2 基于滑模控制的直接转矩控制系统 20
4.2.1 滑模控制控制器设计 20
4.2.2 控制器框图 21
4.3 改进系统仿真 22
4.3.1 基于滑模控制的直接转矩系统模型 22
4.3.2 滑模控制模块 23
4.3.3 静止坐标转换与旋转坐标互换 23
4.3.3 改进系统仿真结果 24
4.4 本章小结 26
第5章 总结及展望 27
参考文献 28
附录A 30
附录B 32
附录C 33
附录D 34
致 谢 35
第1章 绪论
1.1 研究背景和意义
在永磁同步电机出现之前,直流电机获得很广泛的使用。直流电机性能优异,具有很好的启动和制动性能且控制容易,并且直流电机具有很宽的调速范围且可以平滑地调速。但是由于直流电机在结构上需要安装使用电刷和换向器来获得直流电动势,而电刷和换向器在电机的运行过程中一直是处于摩擦状态,因此会产生较大的摩擦损耗并且很容易产生电火花,使得直流电机的使用寿命和使用安全可靠性降低。而在永磁同步电机出现之后,永磁同步电机因为其结构简单、效率高、功率因数高和动态性能好等优点而受到越来越多的青睐,渐渐地就出现了取代交流异步电机的趋势[1]。
永磁同步电机(简称PMSM)是一种由永磁体励磁而产生同步旋转磁场的同步电机,永磁体作为电机转子产生旋转磁场,定子绕组在旋转磁场作用下产生电枢反应,感应出电流。与感应电机相比,PMSM有许多优点,如结构简单、效率高、功率因数高和动态性能好等等[2]。随着电力电子技术、电机控制技术等各种关于电机方面的技术和软硬件的不断仿真更新,使得原来限制交流大量使用的耦合问题被很好地解决了,也因此使得交流电机获得越来越广泛的应用。PMSM也因为其许多的优点而应用得越来越广泛。
使用电机就要对电机进行控制,而在电机的使用中,电机采用什么样的控制方式是非常重要的,合适的控制方式能够使电机获得更好的性能和更高的效率。电机控制方式主要有矢量控制与直接转矩控制两种。本文主要介绍三相永磁同步电机的直接控制,矢量控制不做介绍。而三相永磁同步电机的直接转矩控制系统在实际的使用中发现其存在很大的转矩和磁链波动,这对电机的稳定运行具有很大的影响,因此需要对这种方式进行改进。
1.2 永磁同步电机发展概况
永磁同步电机是一个很复杂的、非线性的系统,且具有很强的耦合性。在永磁同步电机刚出现的时候,那时候还处于18世纪,工业水平与现在相差甚远,并且永磁同步电机方面的技术匮乏,所以做出来的永磁同步电机效率十分的低,并且体积大、重量高,使用很不方便,使得永磁同步电机的发展速度变慢。再后来随着科学技术的发展和更多永磁材料的发现,才使得永磁同步电机的性能渐渐的提高,体积越来越小,重量越来越轻等,最终在各个领域获得广泛的使用[3][4]。
无论是永磁同步电机还是异步电机,主要的结构都是定子和转子,定子和转子不同,电机的性质就不一样。将两种电机的结构进行比较,可以发现两种电机的定子部分是一样的,不同的地方是转子的构成不同。其中,异步电机的转子主要是感应线圈,由感应线圈通电而产生电磁场;永磁同步电机的转子主要是永磁体,电机磁场由永磁体通电产生,且永磁同步电机定子的旋转速度和转子磁场的旋转速度是同步的,异步电机则不是同步的。因为两种的电机的磁场产生的方式不同,因此两种电机使用时消耗的电能就不一样,而永磁体由于其自身的性能原因,在使用时所需的电能就比感应线圈所需的电能少,因此永磁同步电机就比异步电机耗能少,且效率更高。除此之外,永磁同步电机还有结构简单、体积小、重量轻、效率高、功率因数高、动态性能好、可靠性高等许多优点[5][6]。
1831年,世界上的第一台电机被制造出来,并且这台电机就是永磁同步电机,然而当时所发现的永磁材料的性能地下,并没发现更多性能优良的永磁材料,从而使永磁同步电机的发展速度变慢,并在很短的时间内就被励磁电机所替代。直到20世纪30年代铝镍钻永磁(最大磁能积可达85 KJ/m3)和20世纪50年代铁氧体永磁(最大磁能积现可达40 KJ/m3)等材料的出现,特别是稀土永磁材料,使得磁性能有了很大程度的提高,使得永磁同步电机的发展有焕发出新的生机。到了20世纪70年代时,以钕铁硼这种具有很大的矫顽力、很强的剩磁和退磁能力、很高的磁能为代表的稀土永磁材料的出现,才使得大功率永磁同步电机登上了历史舞台。到了80年代,一些低价的永磁材料出现,使得永磁同步电机的运用越来越广泛。随着永磁同步电机的广泛应用,永磁同步的电机的研究也越来越成熟,各种大功率的永磁同步电机慢慢出现。1986年德国西门子研究出转速可达230转每分钟和功率1095千瓦的六相永磁同步电机,且体积更小,只有传统直流的电机的40%左右,损耗只有传统直流电机的80%左右,主要用于船舶当中;瑞士ABB公司也制造了最大安装功率可达38兆瓦的永磁同步电动机,同样用于船舶之上;我国虽然起步比较晚,但是也已研发制造出3兆瓦的高速度永磁同步发电机[7][8]。
1.3 直接转矩控制发展概况
直接转矩控制理论是在20世纪80年代中期,德国学者M.Depenbrock在研究瞬时空间理论时首次提出的,M.Depenbrock提出在感应电机的控制系统中,采用滞环控制器,对定子转矩和定子磁链进行滞环控制,之后依照已经确定好的开关表选取合适的空间电压矢量来控制转矩和磁链。接着在1987年他又将直接转矩控制技术推广到弱磁调速领域;日本学者I.Takahashi在M.Depenbrock之后提出了一种新的直接转矩控制方案,且获得了很好的控制性能。直接转矩控制是一种跟矢量控制相当的电机控制技术,它的提出对推动电机控制技术的发展具有重大的影响。直接转矩控制刚开始提出时的作用对象是感应电机,随着人们不停地研究,直接转矩控制也被逐渐被应用到永磁同步电机的控制上[9]。
直接转矩控制技术拥有良好的电机控制性能,却也有转矩和磁链波动大等缺点,许多学者在对直接转矩控制存在的这些问题进行改进研究,多年来也取得了很多的研究成果。如在直接转矩控制中引入了空间电压矢量调制技术,合成更多的电压矢量;用滑模结构控制取代磁链和转矩调节器;引入零电压矢量,减小转矩和磁链波动;设计更好的滞环比较器,减小转矩波动等[10-13]。
因为传统直接转矩控制系统存在转转矩和磁链波动大等问题,所以直接转矩控制的研究目的主要是为了抑制转矩和磁链波动并使相电流更加趋近于正弦波,可以通过精确计算最优定子磁链用来设置合适的给定磁链值和利用合适的电压矢量来精确控制转矩和磁链来达到。
在定子磁链方面,主要设计改进的是如何简洁地计算出更加趋近于最优定子磁链的磁链值。2014年,Shinohara A ,Inoue Y ,Morimoto S 等人,在d-q坐标系中设计方案计算出更加精确的最优定子磁链,并在小范围内调整定子磁链,根据定子电流的变化和磁链的比值对磁链进行调整,降低了电机对参数的精度要求;2015年,他们又在M-T坐标系中,设计计算出更加精确的最优定子磁链的方法,但计算方法较为复杂;2017年,他们又在此基础上对d轴和q轴的电感进行在线估算,以此来估算更加精确的定子磁链[14]。2015年Inoue T ,Inoue Y ,Morimoto S等,在M-T坐标中设计函数作出电流与最优定子磁链的函数曲线,并在2017年,使用迭代方法计算更加接近最优磁链的定子磁链[15]。2018年,刘国海,黄旭,周华伟,设计磁链最优探测模块,其运算量更小、算法更加简洁。
在空间电压矢量方面,主要解决的问题是怎样选择合适的电压矢量来更加准确地对转矩和磁链进行控制。2002年,Martins C A ,Roboam X ,Meynard T A 等,在直接转矩控制之中使用具有更多电平的电源逆变器来增加可控制电机空间电压矢量的个数,以此获取更加适合的电压矢量来达到精确控制转矩和磁链的目的,但由于此方法使电源逆变器的电平个数增加许多,从而增加了系统的复杂性,也增加了开关数量,使硬件负担变大,成本提高。
目前世界各工业强国都在大力发展直接转矩控制技术,其中德国、美国和日本处于技术领先地位,在德国,兆瓦级的电机已经可以使用直接转矩控制技术进行控制了。日本在变频调速装置方面的研究也达到了千瓦级别,这个级别的装置各种性能都更加优秀,在国际上也处于领先地位。而今后的直接转矩控制技术也将向数字化智能化发展。我国的对直接转矩控制技术的研究开始得较晚,距离国际先进技术水平还有很长的一段路要走。尽管如此,我国也已经将直接转矩控制技术应用到大功率的电机上,并获得了很不错效率。在交流调速方面,现在还是无法批量生产。我国现在的主要任务是在学习国外先进技术的基础上,研究设计具有自己特色直接转矩控制技术。
由于直接转矩控制使用定子磁链定向技术,仅涉及静止坐标变换,结构比较简单且鲁棒性强,转矩的响应快,因此直接转矩控制获得了广泛应用。但是直接转矩控制仍然存在转矩和磁链波动大,相电流谐波含量高等缺点,因此研究的是一种通过滑模结构来取代磁链和转矩置换调节器的改进直接转矩控制方式。
1.4 基于滑模结构的直接转矩控制发展概况
滑模控制也称为变结构控制,是在20世纪60年代被前苏联学者Emelyanov和Barbashin首次提出来的,之后经过Utkin等学者的研究,解决滑模控制技术存在的问题,并推广滑模技术,使得滑模控制技术在逐渐成为了20世纪70年代在电机控制方面的一个比较独立与重要的部分。形成了控制系统的一般设计方法,被大量地应用于电机、机器人等领域[16]。
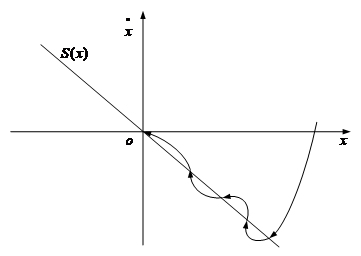
滑模控制本质上是一种特殊的非线性控制,滑模控制在对系统进行控制的时候,它的结构并不是确定不变的,而是根据系统的状态进行预设的变化,控制系统向事先设计好的“滑动模态”运动,从而达到控制系统的目的,所以滑模控制系统的结构是一直都在变化的。虽然滑模控制的结构不是线性的,但其控制的对象却可以是线性的。由于滑模控制的滑动模态是事先设计的,并且与系统的参数和干扰无关,所以滑模控制具有很强的鲁棒性和很快的响应速度。
滑动控制最大的缺点就是存在抖振。抖振是滑模控制在实际应用中的突出问题,抖振问题出现是因为开关在切换时存在时间延迟。因此,而滑模控制因为需要控制系统顺着事先设定的“滑动模态”的状态轨迹运动,但是当状态轨迹到达滑模面后很难严格地沿着滑模面向着平衡点运动,而是在滑模面的两边不断摆动,从而产生波动,就是抖振问题。因此,开关的时间延迟越小,抖振就越小,系统的控制性能就越好,因此,削弱抖振成为提高永磁同步电机滑模控制性能的重要方法之一[17]。
近年来,学术界对变结构控制理论的研究已经转移到如何减小并防止抖振的发生的研究上来。为了减小系统抖振,国内外学者提出设计高阶的滑模控制,如twisting算法、suboptiomal算法以及super twisting算法等。其中super twisting(超扭曲)是将不连续的高频开关特性转移到更高阶的滑模面上,它的实现并不需要滑模变量的导数,从而在本质上解决了滑模抖振的现象[18]。2014年,张帅,王平,韩邦成,程金绪等人在滑模控制中加入模糊控制,建立了模糊滑模观测器,通过这种模糊算法抑制系统抖振;2014年,袁雷,肖飞使用Sigmiod函数替代sgn符号函数,减弱了系统抖振。除了以上这些方法之外,还有很多被提出用来抑制滑模抖振的方法与策略,如采用高阶滑模替代一阶滑模,将滑模控制以其他策略结合的混合滑模,将滑模与智能控制结合的智能滑模等[19-24]。滑模控制虽然有抖振问题,但是因其具有鲁棒性强等许多优点,被广泛地应用在永磁同步电机控制系统中。
1.5 主要研究内容
本文主要研究内容为三相永磁同步电机的传统直接转矩控制系统和一种改进的基于滑模控制的直接转矩控制系统。文中介绍了三相永磁同步电机的传统直接转矩控制的原理与仿真过程,并由仿真结果分析传统直接转矩控制系统的存在的问题,然后对基于滑模控制的直接转矩控制系统进行理论研究与建模仿真,并将仿真结果与传统直接转矩控制系统的仿真结果进行对比,并分析改进系统的性能。
第1章主要阐述研究意义与研究背景,并介绍永磁同步电机、直接转矩控制技术和滑模控制技术的发展历程。
第2章主要介绍传统直接转矩控制系统原理与直接转矩控制系统中的各个部分的原理。
第3章主要是对传统直接转矩控制系统的建模仿真,其中详细介绍系统中各个模块的建模过程,并对仿真结果进行了分析。
第4章主要是对一种基于滑模控制的直接转矩控制系统的原理介绍与分析,并对其进行仿真验证。
第5章为本文总结与展望。
第2章 永磁同步电机直接控制系统
2.1 三相永磁同步电机直接转矩控制系统结构
直接转矩控制系统不是通过控制电压、电流来间接地控制转矩,而是将转矩作为控制对象来直接对转矩进行控制。其控制方法为:利用空间电压矢量的分析方法,以定子磁场定向方式,直接在电机定子坐标上计算电机定子磁链的模和定子转矩的大小,并通过对定子磁链和定子转矩的直接观测并形成反馈来实现对转矩的准确控制,从而使电机的控制性能更加优异,提高电机的效率。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: