磁驱响应性光子晶体球微米机器人毕业论文
2021-12-06 20:51:15
论文总字数:26378字
摘 要
磁驱动微纳米机器人是一种典型的通过引入外场能量来进行远程驱动的微纳米机器。由于磁场的组织穿透力强、无创伤性、强度及方向容易控制等优点,磁驱微纳米机器人在药物递送、体内成像及信号传感等方面具有广阔的应用前景。但目前的磁驱动微纳米机器人设计主要是基于无机微纳米粒子,虽然能够递送货物,但智能化水平低,不具备对环境的感知能力,阻碍了其在生物医学领域的广泛应用。针对此问题,我们提出通过构建响应性光子晶体的方法来实现磁驱动微纳米机器人对液体介质化学信号的感知与反馈,研究了磁驱响应性光子晶体微米机器人的尺寸控制方法、磁驱运动行为和pH传感性能,具体如下:
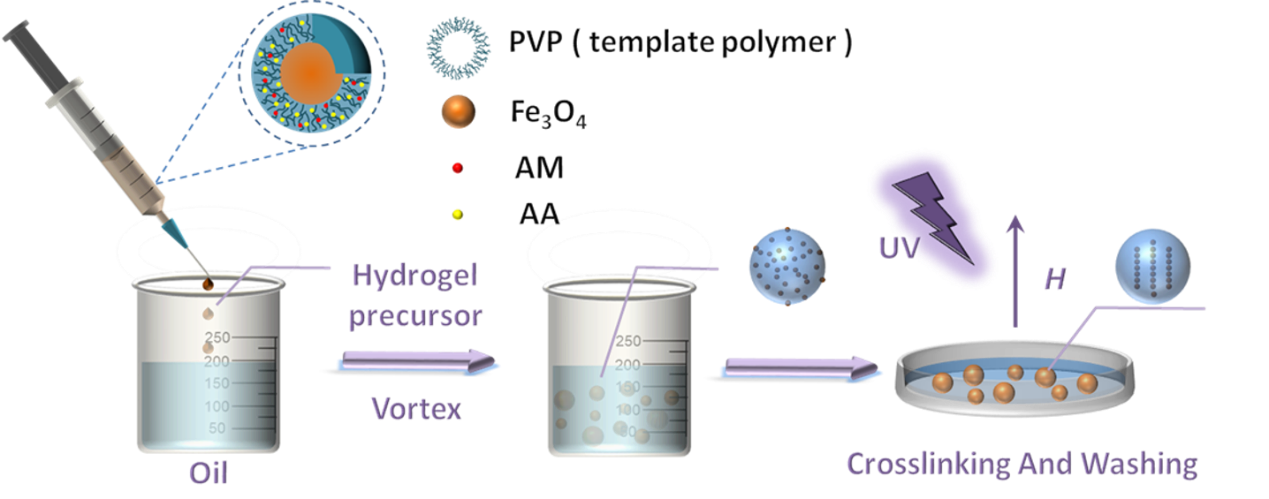
1. 利用表面修饰有聚乙烯吡络烷酮的单分散超顺磁Fe3O4粒子(Fe3O4@PVP)的磁组装和反相乳液聚合的方法,将Fe3O4光子晶体链封装在聚丙烯酸-丙烯酰胺(poly(AA-co-AM))水凝胶微球中,制备得到了具有pH值响应性的Fe3O4@PVP @poly(AA-co-AM)磁驱响应性光子晶体微米机器人。通过提高转速可制备出小尺寸微球,并提高微球的尺寸均一性。
2. 在施加yz平面上的旋转磁场后,磁驱响应性光子晶体微米机器人以滚动的方式在基板表面运动,通过改变xy平面上磁场的方向来改变微米机器人的运动方向。
3. 随着介质中的pH变化,磁驱响应性光子晶体微米机器人产生响应性膨胀或收缩,进而改变其内部光子链的粒子间距,呈现出不同的结构色。当pH增加时,微米机器人衍射波长红移,降低时,微米机器人衍射波长蓝移。通过实验验证和机理分析证明了磁驱响应性光子晶体微米机器人可实现对微环境的化学信号进行“运动”感知和反馈,为开发新一代智能微纳米机器人提供了新思路。
关键词:响应性水凝胶;光子晶体;磁驱动微纳米机器人;微环境传感
Abstract
Magnetically driven micro/nanorobots are typical micro/nanomachines driven remotely by using external field energy. Because of the advantages of magnetic field, such as strong tissue penetration, non-invasive, easy to control the intensity and direction, the magnetically driven micro/nanorobots have a broad application prospect in drug delivery, in vivo imaging and signal sensing. However, the current design of the magnetically driven micro/nanorobots is based on inorganic micro/nanoparticles. Although they can deliver goods, their low level of intelligence and lack of environmental perception ability hinder its wide application in the field of biomedicine. To solve this problem, we propose a method of constructing responsive photonic crystals to realize the sensing and feedback of chemical signals in the liquid medium by magnetically driven micro/nanorobots, and study the method of size control, magnetically driven motion behavior and pH sensing performance of the magnetically driven photonic crystal microrobots. The details are as follows:
1. Using the method of magnetic assembly and inverse emulsion polymerization of monodisperse superparamagnetic Fe3O4 particles with surface modified polyvinyl pyrrolidone (Fe3O4@PVP), the Fe3O4 photonic crystal chains were encapsulated in poly(acrylic acid-co-acrylamide) (poly(AA-co-AM)) hydrogel microspheres, and Fe3O4@PVP@poly(AA-co-AM) magnetically driven photonic crystal microrobots with pH responsiveness were prepared. By increasing the rotating speed, the small size microspheres could be prepared and the size uniformity of microspheres could be improved.
2. After applying the rotating magnetic field in the y-z plane, the responsive photonic crystal microrobots move on the substrate surface in a rolling way, and it can change the moving direction of the microrobots by changing the direction of the magnetic field on the x-y plane.
3. With the change of pH in the medium, the responsive photonic crystal microrobots will expand or contract in response, and then change the space between particles of their internal photonic crystal chains, presenting different structural colors. When pH increases, the wavelength of diffracted light of microrobots appears redshift, and when the pH decreases, the wavelength of diffracted light of microrobots appears blueshift. Through experimental verification and mechanism analysis, it is proved that the magnetically driven responsive photonic crystal microrobots can realize the motion sensing and feedback of chemical signals in the microenvironment, which provides a new idea for development of a new generation of intelligent micro/nanorobots.
Key Words:responsive hydrogels; photonic crystals; magnetically driven micro/nanorobots; microenvironment sensing
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 研究背景 1
1.2 微纳米机器人的驱动机理 1
1.2.1 气泡反冲型微纳米机器人 1
1.2.2 自电泳型微纳米机器人 2
1.2.3 电场驱动型微纳米机器人 3
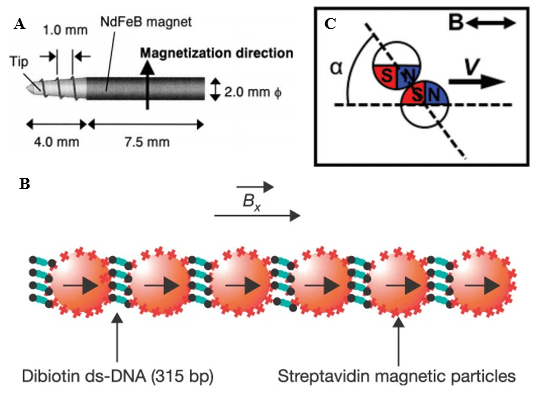
1.2.4 磁场驱动型微纳米机器人 4
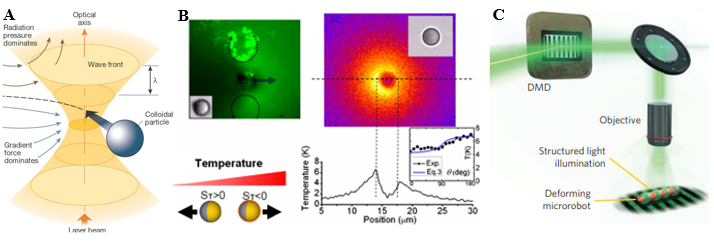
1.2.5 光驱动型微纳米机器人 5
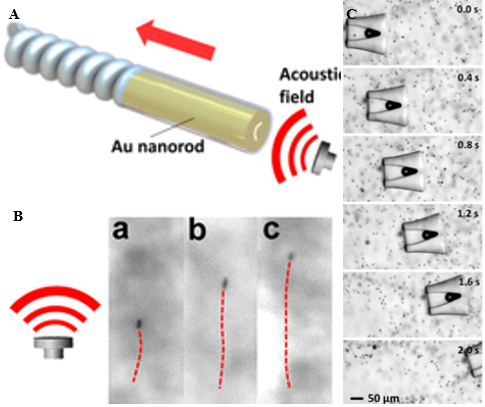
1.2.6 超声驱动型微纳米机器人 6
1.3 微纳米机器人的示踪方法 7
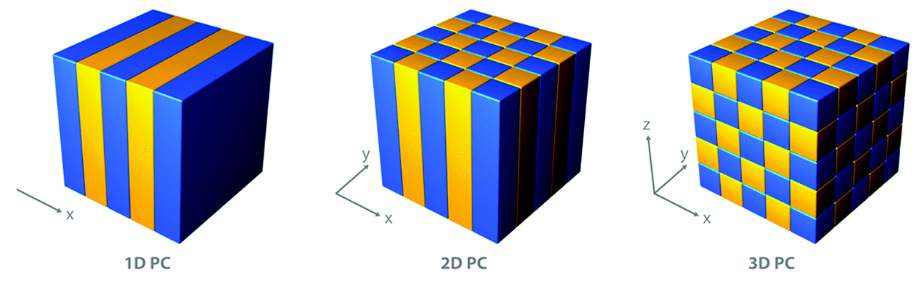
1.4 光子晶体简介 8
1.5 选题依据与研究内容 9
1.5.1 选题依据 9
1.5.2 研究内容 9
第二章 实验部分 10
2.1 实验试剂与仪器 10
2.1.1 实验试剂 10
2.1.2 实验仪器 10
2.2 实验样品制备 11
2.2.1 单分散的超顺磁粒子的制备 11
2.2.2 磁驱响应性光子晶体球微米机器人的制备 11
2.3 材料测试 12
第三章 结果与讨论 13
3.1 磁驱响应性光子晶体微米机器人显微形貌分析 13
3.2 磁驱响应性光子晶体微米机器人运动行为分析 13
3.3 磁驱响应性光子晶体微米机器人传感性能分析 15
第四章 结论与展望 18
4.1 结论 18
4.2 展望 18
参考文献 19
致 谢 23
附录A 24
附录B 25
第一章 绪论
1.1 研究背景
微纳米机器人(Micro/nanorobots)是一类尺寸在微米或纳米尺度,能把其他形式的能量转换成自身机械能并具备执行复杂任务能力的微纳米器件。1959年Richard Feynman在加州理工学院物理年会上的演讲《There’s Plenty of Room at the Bottom》拉开了微纳米技术的序幕。而1966年的电影《Fantastic Voyage》,则激发了科学家们对一种微小的可以在人体血液内航行并实现定点治疗的装置的研究热情。由于微纳米机器人通常在一个低雷诺数的流体介质中运动,其运动不再受惯性力控制。因此,实现微纳米机器人的驱动和运动控制一直是该领域的热点方向。随着纳米制造技术(分子生物技术、微纳米电子、传感器和微纳米电机技术)的发展[1],人们设计和制备出多种类型的微纳米机器人,目前微纳米机器人已在水体修复、环境检测、药物递送、细胞操控、微手术及超结构自组装系统等方面展现出良好的应用前景,是目前科学研究的前沿方向[2-6]。
微纳米机器人按照驱动方式可分为化学驱动型(气泡、浓度梯度等)和外场驱动型(声、光、磁、电) [7-8]。其中,化学驱动型微纳米机器人是基于非对称化学反应产生的气泡反冲,或分子、离子浓度梯度扩散泳力来提供驱动力,因此,非对称结构的设计以及不同的应用场景下材料的选择,是此类微纳米机器人设计的关键。化学驱动型微纳米机器人往往通过金属与半导体耦合来构建不对称结构。此类微纳米机器人利用半导体材料的氧化还原反应可实现对污染环境的运动修复,在环境修复领域表现出良好的应用前景。由于大多数催化材料和动力燃料具有较强的生物毒性,并且反应速率易受表面化学环境变化的影响[9-10],因此此类微纳米机器人运动状态难以精确调控,限制了其在生物医学领域的应用。而外场驱动型微纳米机器人由于材料选择范围广,设计受材料的限制小,具有生物相容性好、运动易控制等特点,已成为生物医学应用研究的热点[11-12]。然而由于目前的外场驱动微纳米机器人不具备对液体介质的感知能力,以至于难以实现智能化和多功能化,这对其在生物医学领域的应用提出了一项重大挑战。
1.2 微纳米机器人的驱动机理
1.2.1 气泡反冲型微纳米机器人
气泡反冲驱动是最早的驱动设计策略[13]。微纳米机器人与化学燃料反应会产生气泡,在气泡脱离微纳米机器人的过程中,微纳米机器人会受到气泡给予的反向推动力,从而实现自驱动。张良方团队[14]开发了一种Mg基微纳米机器人,利用原子层沉积技术将TiO2均匀的覆盖在Mg颗粒上,并通过Mg颗粒与玻璃接触的方法留下一个开口,以形成Janus结构。该微纳米机器人负载有可以治疗幽门螺杆菌感染的克拉霉素。当其处于胃部环境中时,没有被TiO2覆盖的Mg会与胃部盐酸接触发生反应产生H2,从而推动微纳米机器人前进,使微纳米机器人与胃黏膜粘附在一起并相互作用,如图1.1所示。一方面,该运动释药机器人可在胃部病变区域停留,提升局部药物释放时间;另一方面,驱动反应可提高胃部pH值,降低胃酸对药物疗效的影响。因此,该微纳米机器人在治疗胃部疾病方面展现出良好的应用前景。
请支付后下载全文,论文总字数:26378字
相关图片展示:
您可能感兴趣的文章
- 激光作用下ZrNiSn合金热电材料组成、结构和性能的演化规律开题报告
- 原位生长于碳纤维表面的钒氧化物柔性电极制备开题报告
- 锂硫电池用TixOy-S/HGs复合材料的制备与性能开题报告
- MnO2纳米片修饰ZnO纳米棒阵列的气敏性能研究开题报告
- 基于三维碳基孔结构和电解质协同优化的微型超级电容器文献综述
- 基于C-MEMS工艺的微型混合锂离子电容器构筑及性能开题报告
- 多孔碳负载钼基纳米材料作为高性能析氢电催化剂文献综述
- Cu掺杂ZnxCd1-xS纳米晶的制备与性能研究开题报告
- 用于光伏的III-V族半导体低成本生长外文翻译资料
- 太阳能电池中的GaSb / InGaAs 量子点阱混合结构有源区外文翻译资料



