基于运动想象的脚踝康复机器人系统设计开题报告
2020-02-18 18:25:24
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
大脑是人体中最发达而是最复杂的器官,是中枢神经系统的最主要也是最高级部分。大脑由大量的神经细胞组成,而神经细胞的各种活动通过神经肌肉通道实现对外部的控制或与外界环境进行通信。但是,众所周知,有多种疾病可以损伤脑与外部环境进行交流和控制的神经肌肉通路,致使人脑失去对肌肉的控制,导致人脑与外界失去联系。随着计算机技术的飞速发展和对人脑研究的不断深入,人们尝试直接在人脑和外界设备直接建立联系而不是通过肌肉控制,这就是脑-机接口的概念。
2. 研究的基本内容与方案
本文以脑机接口为背景,要求设计一个基于运动想象的脑机接口以控制机器人,首先应做到常用的信号处理算法实现运动想象脑电信号多分类,利用 ica,pca,fft、小波分析等方法,从经过预处理的脑电信号中提取与受试者意图相关的特定特征量(如频率变化、幅度变化等);特征量提取后交给分类器进行分类,分类器的输出即作为控制器的输入。利用 matlab 完成信号分析程序的编写和测试,然后使用 matlab 自带的 com builder 编译器将信号分析程序编译成为 com 组件,最后在 vc 中通过调用该组件来完成信号分析功能。
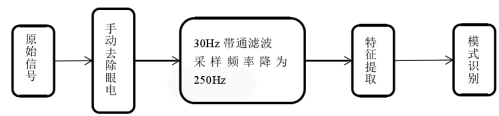
图1 信号处理流程图
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉开发环境。
第6-9周:编程实现各算法,并进行仿真调试。
4. 参考文献(12篇以上)
[1] taRiq m, uhlenbeRg l, tRivailo p, et al.mu-beta rhythm eRd/eRs quantification for foot motorexecution and imagery tasks in bci applications[c].ieee international conference on cognitiveinfocommunications,2017: 000091-000096.
[2]安兴伟,曹勇,焦学军,等. 基于视听交互刺激的认知机理与脑机接口范式研究[j]. 电子测量与仪器学报,2017,31( 7) : 983-993
[3] wolpaw j,wolpaw e w. brain-computer interfaces:principles and practice[m]. new york: oxforduniversity press,2012.



