机械臂多自由度轨迹追踪控制系统的设计与实现毕业论文
2020-08-13 20:47:23
摘 要
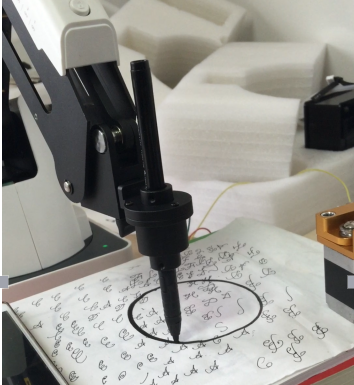
本文实现桌面机械臂在3D空间内多自由度轨迹追踪控制的系统的设计。在查阅相关文献并深入研究桌面机械臂动力学建模、轨迹规划算法以及运动控制策略等相关理论,在此基础上设计出适用于桌面机械臂结构及运动特性的较精确轨迹追踪控制系统。
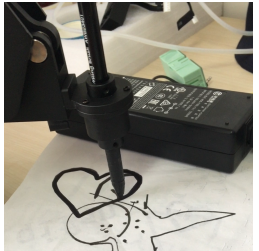
论文阐述了机械臂整个控制系统设计方案,包括整个系统的硬件组成,追踪系统的软件设计,上位机显示界面的搭建,完成了机械臂系统与STM32硬件平台和PC端VS的协议通信,并且最终通过控制硬件平台STM32实现对我们输入端的输入采集,对Dobot越疆魔术师机械臂进行轨迹控制,完成VS2015对机械臂系统的实时通信,实现实时坐标位置的曲线绘制,并对整个系统进行总结和不足,并对下一步的研究提出了展望和规划。
关键词:工业桌面机械臂;轨迹控制与追踪;数据处理;通信协议;上位机
Abstract
In this paper, the design of multi degree of freedom trajectory tracking control system of desktop manipulator in 3D space is realized. In the literature review and in-depth research on related theories of desktop manipulator dynamics modeling and trajectory planning algorithm and motion control strategy, based on the designed tracking control system more accurate trajectory of robot arm structure and motion characteristics of the desktop.
This paper describes the design of the manipulator control system, including the hardware and software design of the tracking system, PC display interface, the communication protocol of mechanical arm system and STM32 hardware platform and PC terminal VS completed, and finally through the control of hardware platform to realize the STM32 of our input data acquisition terminal the trajectory control of Dobot more Xinjiang magician manipulator, complete the VS2015 real-time communication of the manipulator system, real-time rendering of the coordinate curve, and the whole system are summarized and the insufficiency, and puts forward the prospect and planning for the next phase of research.
Keywords: Industrial desktop manipulator; trajectory control and tracking; data processing; communication protocol; host computer
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.3 本文主要研究内容 4
第2章 机械臂多自由度轨迹追踪控制系统整体框架 5
2.1 机械臂追踪系统的整体实现 5
2.2 Dobot机械臂介绍 5
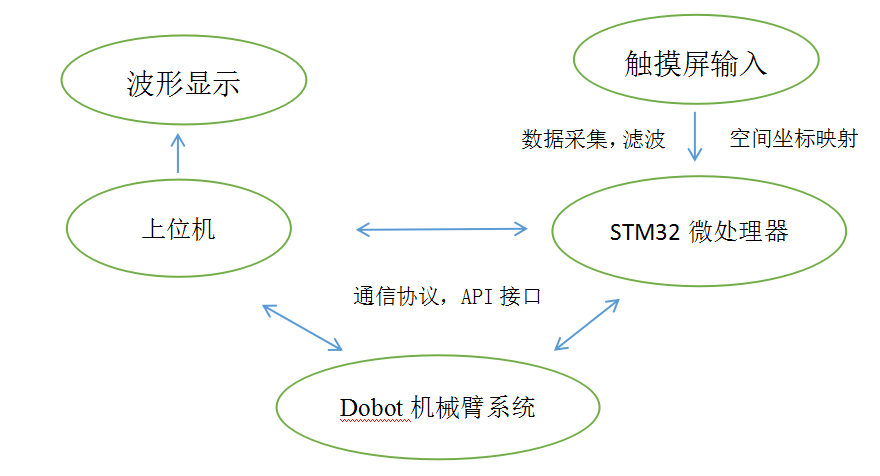
2.3 机械臂追踪系统硬件组成 6
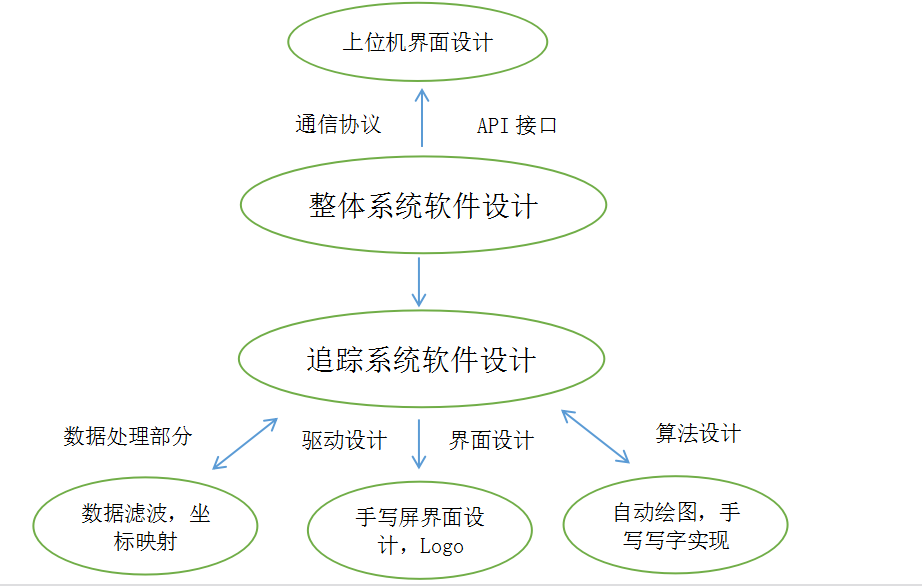
2.4 Dobot机械臂追踪系统的软件部分 7
第3章 机械臂轨迹追踪系统设计 11
3.1 机械臂追踪系统软件设计 11
3.1.1 自动绘图程序算法介绍 11
3.1.3 数据采集和软件滤波处理 14
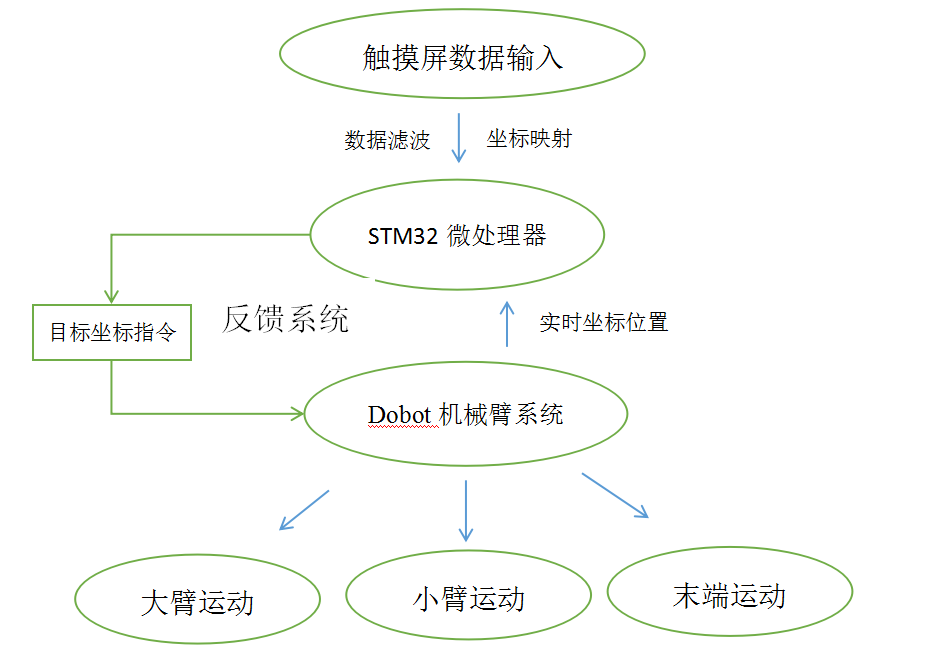
3.2 轨迹追踪系统的实现与触摸屏手写控制 14
3.2.1 STM32微处理器的指令发送 14
3.2.2 触摸屏手势控制实现 15
3.2.3 本章小结 16
第4章 机械臂追踪系统的通信协议以及上位机设计 17
4.1 Dobot机械臂追踪系统的通信部分 17
4.1.1 Dobot越疆机械臂通信协议介绍 17
4.1.2 Dobot越疆机械臂API接口介绍 19
4.1.3 Dobot越疆机械臂与VS2015上位机协议通信 19
4.2 上位机VS界面设计和上位机处理程序设计 19
4.3 本章小结 22
第5章 总结与展望 23
5.1 全文工作总结 23
5.2 下一步研究工作展望 23
参考文献 24
致谢 25
第1章 绪论
机器人最主要的执行机构——机械手臂,是机器人领域中极为重要的机械部分,是一种能够编程并在相关指令代码的控制下自动执行某些操作和动作作业的自动化机械装置,是一种能够接受指令,准确地定位到三维空间上的某一点的非线性系统,具有动作非线性,运动强耦合性的动力学特征,在日常制造,手术治疗,军事作业,娱乐服务,半导体制造以及太空探索领域都可以看见他的身影。伴随时代进步的步伐,包括军事制造、工业生产、日常生活等各个领域对机械手臂的控制技术应用也逐渐广泛和普及起来,因此使得设计出一套灵活作业,能按照我们人类思维进行相关动作的多自由角度机械手臂尤为重要。同时大小型机械工业手臂的运用也越发火热起来,相应的,近些年桌面机器臂的研究应用也针对性的日益增多。
1.1 研究背景及意义
近些年,机器人已经在教育,社交,娱乐,服务等领域得到了越来越多的应用。作为人类近代最富有突出性的创新技术其中一项,机器工业手臂的出现极有力地促使了智能机器人科技的发展,机械工业手臂是个复杂的非线性系统,代表的是一门跨学科综合度极高的科学,他包括了人工智能学,生物信息学,电子科学与技术,控制理论与实践科学,电子信息与工程学,通信工程学,智能算法等方面极具前沿价值的科学领域,因此对智能机器人的应用研究将会对人们的日常生活带来极大的便利和创造性的影响。
随着机械手臂在工业装配、零部件制造、精密医疗手术等领域有广泛应用,对各行各业自动化有着极大促进作用。作为二十世纪机械工业浪潮中的弄潮儿,不同形状,奇形怪状的工业机械臂已经以各种各样的方式呈现在了我们的身边,同时作为在自动化学科和实际工程中重要的机械装备,机械臂被普遍地运用在现代的生产线的产品制作和相关作业。
一个成熟机械臂会包含机械构造、传感器应用、硬件设施、相关驱动软件、智能控制算法。近年来,随着服务机器人的兴起,机械臂也正走进我们的日常生活,近年来出现了一些低成本的、小型的、“桌面版”的机械臂的产品,相信这将是服务机器人的一个重要方向。
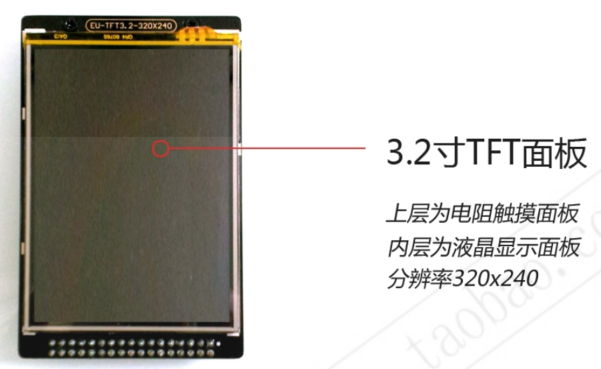
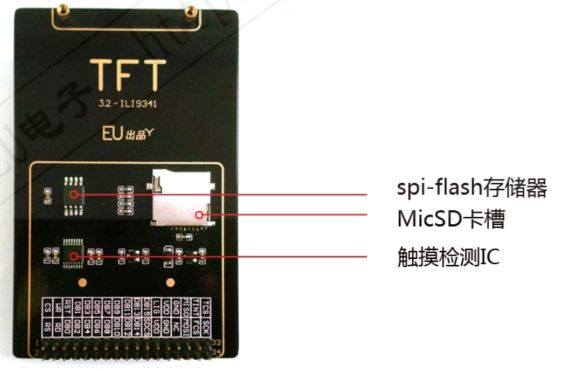
相关图片展示: