基于USB的经颅多普勒超声系统高速数据通信的设计外文翻译资料
2022-11-18 19:46:16

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于USB的经颅多普勒超声系统高速数据通信的设计
1,Mandakh Oyun-Erdene2,Sang-Yep Nam3,Dong-Han Kim1*和Seung-Moo Han3
1韩国庆熙大学电气工程系2韩国国立大学电机工程系3庆熙大学生物医学工程系
*通讯作者: donghani@khu.ac.kr
{baterdene,mandakh,smhan}@khu.ac.kr, synam58@gmail.com
摘要
经颅多普勒超声系统测量脑血管的血流速度。 它向电脑显示器显示功率谱密度并测量其他重要参数。 对于这种测量,设备和计算机之间的传输速度起着重要作用。 为了提供高速率数据通信的处理,大多数经颅多普勒超声系统使用数字信号处理器,该处理器以硬件执行处理,并且通过通用串行总线控制器连接到处理器。 这项研究提出了经颅多普勒超声系统的新设计,该系统使用CY7C68013而不使用数字信号处理器,并使用CY7C68013的通用可编程接口波形进行经颅多普勒超声系统。 此外,本研究还介绍了用于个人计算机的控制库和实施的软件。 根据实施的软件,可以进行经颅多普勒超声系统的处理。
关键词:经颅多普勒超声,GPIF,数据转换格式化,USB通信,CY7C68013
介绍
经颅多普勒(TCD)超声系统测量脑血管的血流速度,并执行信号处理,生成血流速度的功率谱密度(PSD)和一些重要参数给计算机显示器。 它测量颅内主要动脉的血流速度,包括基底动脉(BA),左右大脑前动脉(LACA,RACA),左右颈内动脉(LICAE,RICAE),左右大脑中动脉动脉(LMCA,RMCA),左右大脑后动脉(LPCA,RPCA)以及左右椎动脉(LVA,RVA)。 此外,它还利用2MHz和4MHz超声波探头,并基于检测通过脑血管移动的红血球的频率偏移。 然后TCD超声系统诊断不同类型的疾病,如蛛网膜下腔出血的栓子,狭窄和血管痉挛[1] - [3]。 此外,测量的信号由系统处理,并根据血流方向分离。 分离的信号被转换成声音信号,并且被生成用于个人计算机(PC)的声卡[4-6]。TCD超声设备的主要结构由硬件和软件系统组成。 对于信号处理,实信号和虚信号的传输过程是必要。 它是实时通过通信接口从硬件到软件部分的传输过程。 在软件部分,系统使用来自通信接口的实部和虚部接收信号执行复数快速傅立叶变换(FFT)和降噪处理。 处理后,显示血流速度的PSD和一些重要参数。 有时候,根据脑血管的深度,M模式显示它[7-12]。 在这种情况下,使用数字信号处理器(DSP)以硬件执行每个深度的信号处理。 然后处理后的信号被传输到软件,该软件用于PSD的图像和其他重要的计算。 但是,硬件部分没有直接接收实际和虚拟信号的没有DSP的系统,并且在软件部分中执行M模式的处理。
在这项研究中,介绍了通用串行总线(USB)驱动程序的设计和实现。 所提出的方法基于硬件部分没有DSP的TCD超声系统,该系统直接将实部和虚部信号实时传输到软件部分。 USB驱动程序的设计非常简单,并且是一种经济实用的解决方案,因为所采用的硬件不使用DSP。
系统硬件结构
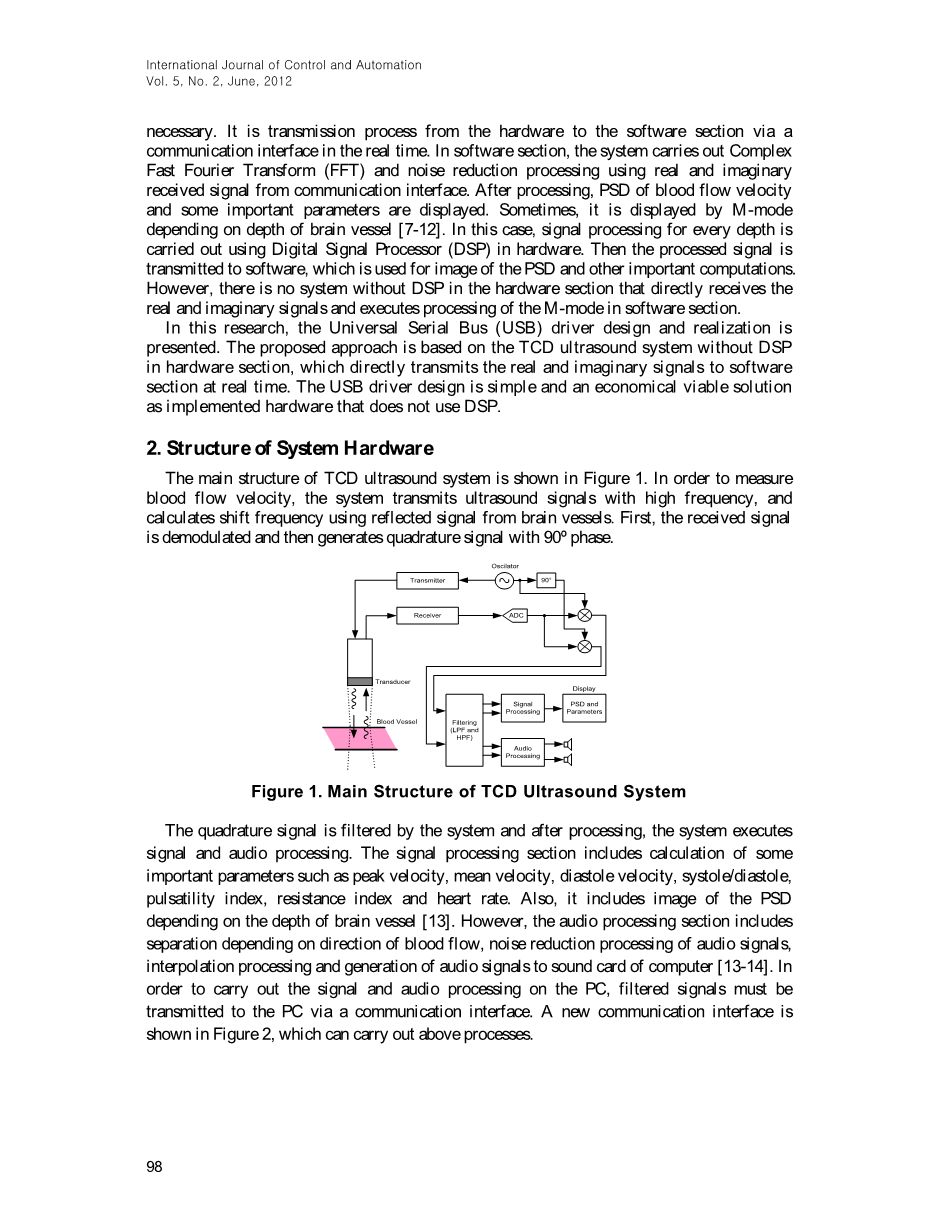
TCD超声系统的主要结构如图1所示。为了测量血流速度,系统发送高频率的超声信号,并使用来自脑血管的反射信号计算移位频率。 首先,解调接收到的信号,然后生成90ordm;相位的正交信号。
Oscilator
传感器
血管
接收器
发射机
90°
ADC
显示
PSD和参数
过滤(LPF和HPF)
信号处理
音频处理
图1. TCD超声系统的主要结构
正交信号由系统过滤,处理后,系统执行信号和音频处理。 信号处理部分包括计算一些重要参数,如峰值速度,平均速度,舒张速度,收缩/舒张,搏动指数,阻力指数和心率。 此外,它包括PSD的图像,取决于脑血管的深度[13]。 然而,音频处理部分包括取决于血流方向的分离,音频信号的降噪处理,内插处理以及计算机声卡的音频信号生成[13-14]。 为了在PC上执行信号和音频处理,必须通过通信接口将过滤后的信号传输到PC。 图2显示了一个新的通信接口,可以执行上述过程。
传感器
WEN#WCLK
RCLK
IFCLK
数据
数据
FIFO A(IDT72V283)
OE 1# PA5
OE2# PA6
FF_USB#唤醒#
重启#
EF1#FF1#REN1#OE1#
USB端口
FD
(15:0)USB
调节器
WEN#WCLK
RCLK
(CY7C68013 FX2)
数据
数据
FIFO B(IDT72V283)
主要的并行接口
重启#
EF2#FF2#REN2#OE2#
RDY0〜5
CTL0〜5
FIFOWCLK
太太#
WENS#
控制块(PLD)
FF1#,FF2#,REN1#,REN2#,EF1#,EF2#MRS#,WENS#
个人计算机
(主办)
Ch.A(I)
ADC(AD9238)
Ch.B(Q)
TCD系统的模拟部分
图2.使用USB用于TCD超声系统的HRDC接口的框图
CY7C68013 FX2用于高速数据通信(HRDC)接口,先进先出(FIFO)IDT72V283用于高速传输的实部和虚部信号处理的每个部分。 CY7C68013 FX2是一款可通过USB端口将数据传输到PC的单芯片[15]。 IDT72V283是具有时钟读写控制和灵活的总线匹配x9 / x18数据流的高速FIFO存储器[16]。
USB控制器通过通用可编程接口(GPIF)接口连接到FIFO。 为了传输控制信号,USB控制器通过主并行接口连接到控制块。 控制块执行以下活动:模拟信号转换,FIFO的数据传输和控制信号传输到USB控制器。 图3显示了实现的USB接口的硬件。
-
- (b)
图3. TCD超声系统硬件图:(a)系统正面,(b)系统背面
-
USB的设计
- USB接口算法
图4描述了USB接口算法的流程。 该算法由两部分组成。 第一部分是用GPIF接口将实部和虚部信号传输到PC的传输部分。 首先,该部分开始USB的重新计数过程,并给出GPIF的起始值。 此外,当FIFO连接到USB控制器时,这部分调用GPIF波形。
开始
USB初始化
2
是
检查供应商请求(控制端点)
没有
1
是
检查输入端点请求
没有
是
读取缓冲区编号 没满
触发GPIF“FIFO读取”波形
GPIF初始化
1
0xB2 检查供应商 0xB9请求代码
0xB3 0xB8
0xB4 0xB5 0xB6 0xB7
2
选择频道B
选择频道A.
调用PLD控制命令部分
阅读GPIFTRIG
寄存器
阅读GPIFREADYSTAT
寄存器
禁用IN
转让
重置外部FIFO
启用IN
转让
图4. USB接口的主要算法
然后,检查控制端点请求。 如果未收到控制端点请求,则会检查输入端点请求。 如果接收到输入端点请求,算法将检查读取缓冲区未满。 然后,它将通过GPIF波形和重启检查过程接收来自外部FIFO的实际和虚拟信号。 但是,如果收到控制端点请求,则程序指针将被移入第二部分。
第二部分是实现与控制块连接的控制命令。 控制命令由以下功能组成:复位外部FIFO,启用IN传输,禁用IN传输,读取GRIFREADYSTAT寄存器,读取GRIFTRIG寄存器,调用可编程逻辑器件(PLD)控制命令部分,选择Channel-A,选择Channel -B”。 以上命令可以执行以下操作:重置FIFO,启用和禁用读缓冲区的信息传输,读取某些状态寄存器以及与PLD部分进行通信。
GPIF框图和波形
USB控制器可以通过GPIF接口与FIFO连接。 在这种情况下,使用GPIF框图和波形,如图5所示。 采用GPIF Designer软件进行波形设计。 首先,该波形执行复位过程,然后启动模数转换器(ADC)转换。 它仍然等待ADC转换结束。 当ADC转换完成时,波形开始从外部FIFO读取数据的过程。 首先,从FIFOChannel-A收集实际信号。 最后,波形收集来自FIFOChannel-B的虚拟信号。
-
-
- (b)
-
图5. GPIF设计:(a)框图,(b)波形
USB接口的可编程状态如图6所示。其中包括七个状态,其中包括两个决策点,五个非决策点和一个空闲状态。 FIFOChannel-A和FIFOChannel-B的所有数据分别在第一和第二判定点被发送到PC中。 此时,两个判定状态检查空标志1(EF#1)和空标志2(EF#2)的标志。 如果发送FIFOChannel-A和FIFOChannel-B的所有数据,则程序指针将移至空闲状态。
状态7
触发
NDP
闲
NDP
NDP
完成
状态0
状态1
状态2
DP
状态6
IF(EF2#= 1和TCXpire = 0)
NDP
州5
NDP
州4
DP
状态3
IF(EF1#= 1和TCXpire = 0)
非决定点
NDP
DP
决策点
图6. USB接口的可编程状态
-
- 数据总线格式和波形
在这个新的通信接口中,USB控制器通过16位数据总线连接到FIFO,实际和虚拟信号的通信数据内容由12位组成。 但是,剩余的4比特的内容关于12比特的通信数据内容传送附加的脑血管的深度信息。 图7显示了FIFO的传输数据格式。
采样门1
采样门2
采样门3
采样门3
数据位15-14
00
01
10
11
数据位13-2
D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15 D16
数据位1-0
00 01 10 11 00 01 10 11 00 01 10 11 00 01 10 11
图7. FIFO的传输数据格式
这种格式的数据流被分成四个采样门。 所有采样门的选择由14到15的数据位的内容分开。可以为每个采样门传送四个深度数据。 然后,脑血管的每个深度数据被从0到1的数据位分开。在这个传输数据格式中,传输16个深度数据,称为D1-D16。 每个深度数据内容都通过数据位2-13传输。 在这种情况下,可以根据这4位生成M模式的图像,其包括所有测量的脑血管的深度信息。
实施的软件
在这项研究中,描述了一个新的库,它可以传送USB接口的计算机软件。 它被称为usb_driver_tcd.dll。 该库执行对从外部FIFO和控制命令接收的实际和虚拟信号的数据传输的控制。 另一方面,这个库可以直接访问USB接口。 图8显示了USB接口库的结构。
4
1
名称:usb_driver_tcd.dll
2
3
USB驱动程序的DLL
5
6
7
重置USB设备
RstUSB()
发送控制字来控制寄存器
USBcmd()
频道选择
S
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[24306],资料为PDF文档或Word文档,PDF文档可免费转换为Word



