双数字电位器 DS1267外文翻译资料
2023-06-15 17:08:05
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
附录 B 外文译文
双数字电位器 DS1267
1 特点
低功耗,低噪声,无泵钻进设计;
每片封装中含有两只 256 结点的电位器;
串行口实现电位器参数设置与读取;
各电阻可串联而增大总阻值;
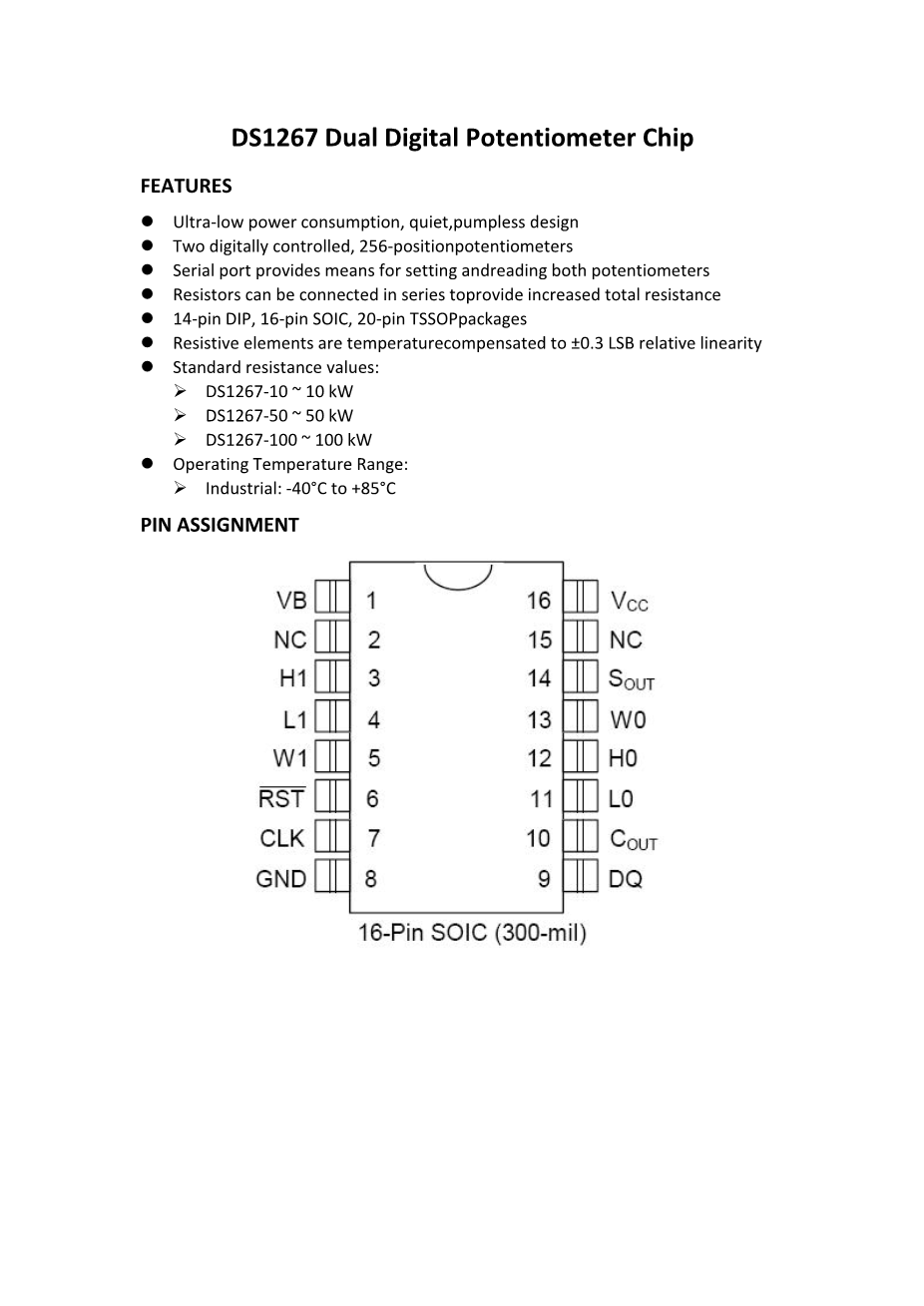
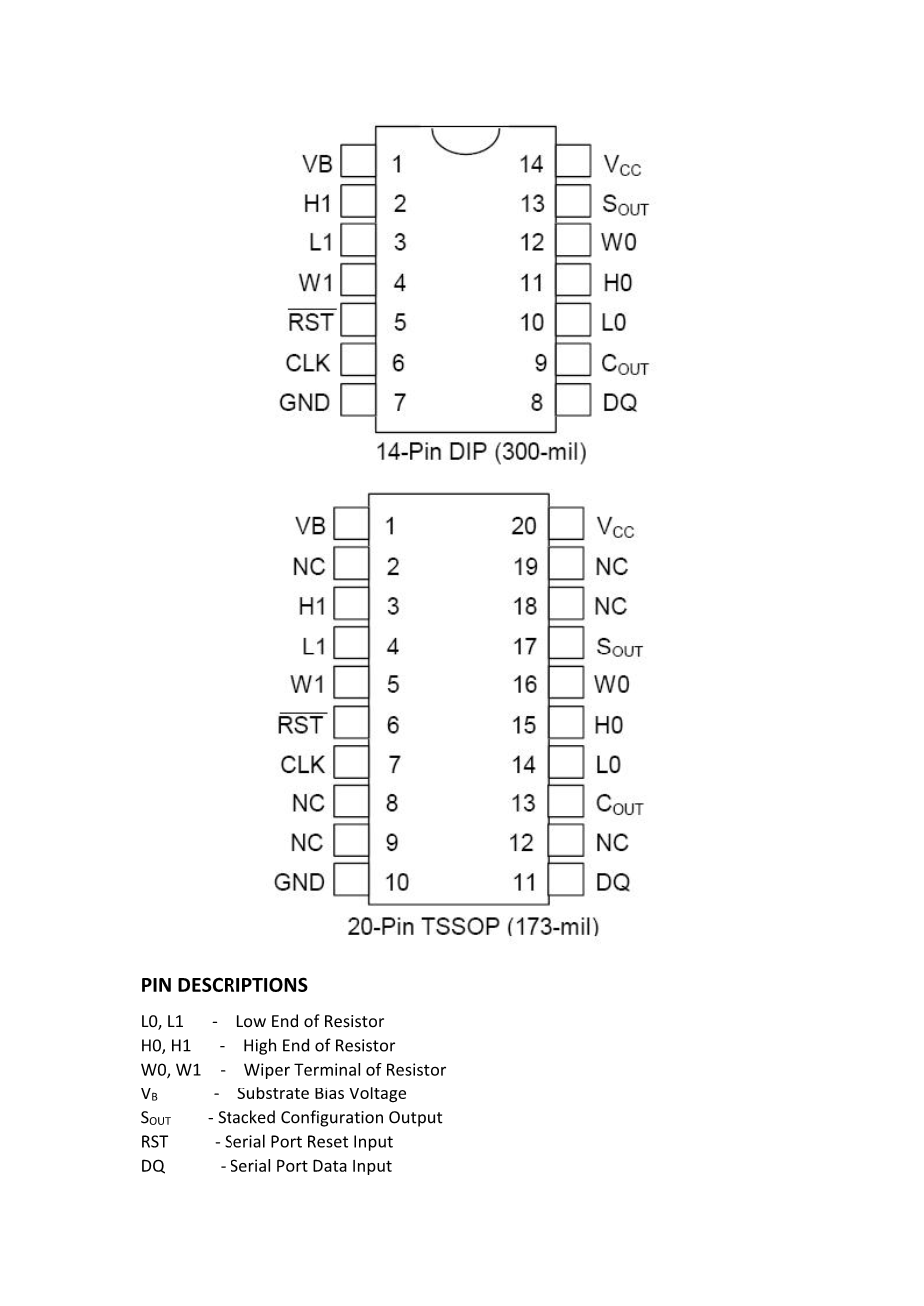
有 14 脚 DIP 封装、16 脚贴片式 SOIC 封装和 20 脚 TSSOP 封装形式;
温度补偿为plusmn;0.3 LSB,相对线性;
电阻标准值为:
– DS1267-10 ~ 10 k
– DS1267-50 ~ 50 k
– DS1267-100 ~ 100 k
工作温度范围:工业上-40°C 至 85°C。
2 引脚分配
3 引脚介绍
L0,L1 – 电位器低端
H0, H1 – 电位器高端
W0, W1 – 电位器滑动端
VB – 基片偏压
SOUT – 两个电位器串接时的输出端
RST – 串行口复位输入端
DQ – 串行口数据输入端
CLK – 串行口时钟输入端
COUT – 多个DS1267环路连接时的数据输出端
VCC – 5 V电源
GND – 地
NC – 无内部连接
4 DS1267 简介
DS1267双路数字电位器内含两个受控制的固态电位器,每个电位器由256个电阻结点组成,滑臂可以到达每个结点及电位器两端。滑臂在电阻阵列上的位置由一个8位二进制数控制,滑臂与哪个结点相连则输出相应的电阻值。芯片内部的信息传递与控制通过三线串行端口实现。滑臂的位置可通过接口进行读写。两个电位器可进行串联(或并联),滑臂的分辨率将增加一倍。在单处理器的环境下,若有多个DS1267,将多片DS1267进行级联或环联可以使多片DS1267共享三线总线。
DS1267有三种标准阻值的电阻,分别为10 k, k, k。其封装有14脚DIP封装、16脚贴片式SOIC封装和20脚TSSOP封装形式。
5 应用
包含256结点的双路数字电位器DS1267的滑臂位置由一个8位数设定,这两个8位数被写入到一个17位的I/O移位寄存器,此寄存器用于保存两个滑臂的位置及芯片在工作状态下的电位器选择位。DS1267结构图如图1所示。
DS1267内的信号传输与控制通过一个三线串行接口实现驱动内部控制逻辑单元。三线串行接口由RST ,CLK, DQ三个输入信号组成。RST信号控制三线串行接口的运行,当RST信号为高电平时,芯片被选中,只有当RST信号为高电平时,数字电位器可进行相关信息传递。CLK信号用于确保数据输入及输出同步。DQ信号线用于传输电位器滑臂设置位置及电位器选择位数值至DS1267的17位移位寄存器中。
图9(a)为三线串行接口的工作时序图。如图,当RST信号为低电平时,三线串行接口不工作,当RST由低电平转变为高电平时,三线接口激活,DS1267内通信可正常进行, DQ端数据即在CLK的上升沿向内部移位寄存器传输。三线串行实时要求如图9(b)-(c)所示。
数据通过三线串行接口写入DS1267,并存入17位移位寄存器(如图2)。17位I/O移位寄存器内数据表示电位器的选择及所选电位器的滑臂位置值,I/O移位寄存器的组成如图2,b0为滑臂选择位,b1~b8为电位器1的滑臂位置数据,b1为高位,b8为低位。b9~b16为电位器0滑臂位置数据,b9为高位,b16为低位。
图1 DS1267结构图
图2 I/O移位寄存器
数据传输是从b0开始,b16结束。若滑臂的位置值欲写入DS1267,则17位数据(或整数倍)将一直被传输。数据传输结束时应发送结束信号,否则可能出现传输不完全或滑臂位置错误的状况。一组数据传输完成后,RST信号须转为低电平以避免任何疏忽而造成移位寄存器内数据变化。当RST信号变为低电平,I/O移位寄存器内容加载入相应的多路复用器中以设置滑臂的位置。新的滑臂位置只在RST信号变为非活动状态而生效。初次上电时,DS1267滑臂的位置设置在总阻值的1/2处或二进制数10000000
6 级联配置
DS1267内的电位器可进行串联,如图3: 图3 DS1267级联配置图
上图中的结构被称为级联结构。此结构可使得端到端的总阻值增加为原来的两倍,滑臂的位置数值最大可为512(或9位分辨率)。
两个滑臂W0 和W1 可通过滑臂选择多路器选择其一并从SOUT 输出,SOUT是两个电位器串接时的滑臂位置输出端。选择的电位器滑臂在SOUT输出是由17位I/O移位寄存器中的滑臂选择位设置控制的。
如果滑臂选择位值为0,多路输出SOUT输出为W0位置;如果栈选择位值为1,多路输出SOUT输出为W1位置。
7 环联操作
DS1267特点之一是多个设备可共用一个单处理器。多个DS1267可被链接或环连,如图4所示。当一个数据位送入DS1267的I/O移位寄存器,在50ns的最大延迟内将在COUT输出信号上显示。DS1267的数据传输初始为为滑臂选择位,另外,无论RST处于何种状态,COUT脚总是处于活动状态,这使得无需改变I/O移位寄存器值即可对其进行读操作。
图4 多个DS1267环联图
前一个DS1267的COUT输出信号可作为下一个DS1267的DQ输入信号。多个电阻器相连时,总的传输数据位数为17乘以环连的DS1267的个数。
最后一个DS1267的COUT端与第一个DS1267的DQ输入间可放置一个可选择的电阻作反馈,用于控制处理器读/写数据或时钟信号循环。反馈电阻或隔离电阻的值应在1~10 k间。
从COUT脚读数时,因隔离电阻使DQ线置于浮态。RST为高电平时COUT表示的是b17的值,并通过隔离电阻反馈到DQ端。CLK信号为上升沿时,b17加载到I/O移位寄存器的第一位,b16成为COUT及下个数字电位器的DQ。移位17次后(或17乘以环连中DS1267的个数),数据移位完成并回到开始位置。RST信号转为低电平以结束数据传输,数据(与读操作前的数据一样)送入滑臂0、滑臂1及滑臂选择位。
8 绝对线性度和相对线性度
绝对线性度定义为真实测量输出电压值与预期输出电压值之间的差值,图5所示测试电路用于测量绝对线性度。当滑臂移至某一位置时,其绝对线性度取决于最小增量或者预期输出值。就测试电路而言,最小增量(MI)或LSB大概为10/512伏。
绝对线性度计算公式如下:
(1) 绝对线性度 AL={VO(真实值)-VO(期望值)}/MI
相对线性度表示相邻两个滑臂位置点间的测量误差,取决于MI值,相对线性度计算公式如下:
(2) 相对线性度 RL={VO(n 1)-VO(n)}/MI
图6表示在25℃下数字电位器DS1267不同滑臂位置所对应的绝对线性度和相对线性度值。
图5 线性度测量电路图
注意:在这样的电路中,总电阻R0~R1中的plusmn;2%▽,会导致plusmn;2.5MI的误差。
图6 DS1267的绝对和相对线性度
9 典型应用配置
图7和图8所示为DS1267的两种典型应用。将元件的滑臂终端与高阻抗负载相连,滑臂电阻的影响最小,因为根据滑臂端电压的不同,滑臂电阻的变化范围为400~1000。图所示为DS1267与反相可变增益放大器相连接,其增益计算公式如下:
AV=-n/(255-n); n=0~255
图8中DS1267工作于固定增益衰减器中,其作用是衰减接收到的信号,注意电阻R1的选择必须比滑臂电阻大以减小滑片电阻对电路增益的影响。
图7 反转可变增益放大器
图8 固定增益衰减器
10 绝对最大额定值
任一脚对地电压(VB=GND) -0.1V~ 7.0V
VB=-5.5V时,电阻两端电压 -5.5V~ 7.0V
VB -5.5V~GND
工作温度 -40℃~ 85℃
储藏温度 -55℃~ 125℃
焊接温度 260℃/10s
*这仅适用于压力额定且元件的功能操作在这些或其他条件下以外的那些指明说明书的操作部分是不可取的。延长绝对最大额定时间的曝光可能会影响可靠性。
推荐直流操作条件
(-40C ~ 85C; VCC=5.0V plusmn;10%)
|
参 数 |
符 号 |
最小值 |
类 型 |
最大值 |
单 位 |
备 注 |
|
电源电压 |
VCC |
4.5 |
5.5 |
V |
1 |
|
|
输入逻辑1 |
VIH |
2.0 |
VCC 0.5 |
V |
1 |
|
|
输入逻辑0 |
VIL |
-0.5 |
0.8 |
V |
1 |
|
|
衬底偏压 |
VB |
-5.5 |
GND |
V |
1 |
|
|
电阻输入 |
L,H,W |
VB-0.5 |
VCC 0.5 |
V |
2 |
直流电气特性
(-40C ~ 85C;
VCC = 5.0V plusmn; 10%)
<td
剩余内容已隐藏,支付完成后下载完整资料</td
资料编号:[604017],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
参 数 |
符 号 |
最小值 |
类 型 |
最大值 |
单 位 |
备 注 |
|
电源电流 |
ICC |
22 |
650 |
uA |
9 |
|
|
输入漏电流 |
ILI |
-1 |
1 |
uA |
||
|
滑动电阻 |
RW |
400 |
1000 |



