视频运动目标速度实时检测仿真研究毕业论文
2020-04-09 15:41:19
摘 要
如今社会与个人经济蓬勃发展,人民生活蒸蒸日上,由此中国汽车的数量逐年递增,交通压力日渐增加,因此急需要开发出一种人力依赖少、环境鲁棒性高、成本低、效果好的这能交通系统来处理日益严峻的交通状况。基于此种现状,智能交通系统技术得以日趋发展与成熟。
而在交通安全中,速度参数尤为重要。基于视频监控的车辆测速技术满足了维护成本低,安装简单方便而且检测精度高的要求,是智能交通系统的重要组成部分。本文以固定摄像头交通流量监控为应用背景,基于视频对于经典的道路车辆跟踪与测速技术进行深入分析,并以此实现了基于视频背景差和基于Harris角点特征匹配的视频车辆测速系统设计。
关键词:智能交通系统;背景差;角点匹配;测速
Abstract
With the social-economic development and people's living standards improving,the number of cars in China has increased year by year,while at the same time traffic pressure is also rising day by day.Therefore, there is an urgent need to develop a traffic system with less human dependency, high environmental robustness,low cost and good efficiency to deal with the increasingly severe traffic conditions.In this context,intelligent transportation system technology has been increasingly developed and matured.
In traffic safety,speed is especially important.The vehicle speed detection based on monitoring video images meets the requirements of low maintenance cost,simple and convenient installation and high detection accuracy, which is very important to intelligent transportation.In this paper, based on the video traffic monitoring of the fixed camera for the application background,We analyse the classic road vehicle tracking and speed measurement technology in depth, and propose a vehicle speed measurement system based on video frame difference and Harris corner matching.
Key Words: Intelligent traffic system;Frame difference;Corner matching;Speed measurement
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究背景 1
1.2 研究现状 1
1.3 车速检测技术概况 2
1.3.1多普勒雷达 2
1.3.2.激光雷达测速 3
1.3.3.视频测速 3
1.4 论文结构与安排 3
第2章 视频车速检测方法 5
2.1引言 5
2.2背景差分法 5
2.3车牌定位法 6
2.4车灯定位法 7
2.5虚拟线圈法 7
2.6小结 8
第3章 车辆测速系统原理与设计 9
3.1 基于背景差的车辆测速系统功能设计 9
3.1.1 概要设计 9
3.1.2 详细设计 9
3.1.3小结 16
3.2基于Harris角点特征匹配的车辆测速系统功能设计 16
3.2.1 概要设计 16
3.2.2 详细设计 17
3.2.3小结 23
第4章 实验结果展示及分析 24
4.1结果展示 24
4.1.1 基于背景差的车速系统仿真结果 24
4.1.2 基于Harris角点匹配的车速系统仿真结果 26
4.2 小结 30
第5章 总结与展望 31
5.1总结 31
5.2展望 31
参考文献 33
致谢 34
第1章 绪论
1.1 研究背景
如今,随着中国城镇化进程的加快,中国人民收入水平以及生活质量的不断提高,车辆也成为了各家各户的必需品,也因此中国的汽车数量逐年递增。但是汽车的普及以及高速公路的快速发展给人们提供便利的同时,也存在着许多问题,影响着道路交通,威肋着人民生命财产,而这已成为世界各国所面临的共同问题。据国家统计局统计,2016年全国有约864.3万起汽车交通事故发生,其中涉及人员伤亡的事故有212846起,共造成了63093人死亡、226430人受伤,造成直接财产损失12.1亿元。而大多数汽车交通事故发生的原因在于车速。在这种严峻的现状之下,人们为了协调道路和车辆之间的关系,保证交通安全,智能交通系统由此诞生[1]。
其中,基于视频监控的车辆速度测量技术是当今智能交通系统的重要组成部分。它是测速技术与图像采集技术的有机结合,不仅能够能够实时监测车辆速度,降低事故发生的可能性,还可以应用于交通驾驶行为观测。速度鉴定是责任认定的依据之一。当有交通事故发生后,通过对事故车辆连续速度鉴定,可以判断车辆是否超速行驶,从而确认事故起因,可以更准确地描述事故的性质,有利于了解事故发生的过程并进行重现。对公路某些交安设施,比如说类似于限速标志等一些起减速效果的设施进行测评时,车辆在经过限速标志前后的车速变化就是最直接有效的标准。因此,可以计算出车辆的连续速度对于安全设施的评估具有重要意义[2]。
而视频监控测速技术拥有:(1)无需专用传感器测速设备,系统建立成本低,传统的超声波技术、红外技术等需要价格高昂的传感器,且难以实现复杂环境下的监控[3];(2)图像去雾、增强技术的存在使得对于自然情况鲁棒性高;(3)可在监控道路环境的同时测出车速,设备安装简单,使用率高;(4)测量结果准确等优点,可以很好的满足对车辆速度的实时性要求。因此希望研究出一种基于视频的车辆测速系统,能够在消耗较小硬件资源的条件下对于监控画面中的汽车速度有较精确的测量,且对于天气情况、道路情况有较好的鲁棒性。此外在测速的同时,能够有效地进行车牌识别等功能扩展,对于特殊路段的违章行为,压黄线闯黄灯,逆行等违法行为监控,提高交通管理的集成性和智能性[4]。
1.2 研究现状
当今的智能交通控制系统是国内外研究的热点和重要课题。世界上使用智能交通系统最为普遍的国家是日本,其次美国、欧洲等一些国家的应用也较为普遍。与此同时中国的智能交通系统也迅速发展起来,北京、上海、广州等大城市目前也已建造了一些智能交通
系统。其中,北京设立的ITS系统应用于高速公路管理、道路交通控制、公共交通指挥以及调度和紧急事件管理4个方面;广州建立ITS系统应用于交通信息共用主平台、物流信息平台系统以及静态交通管理3个方面[5]。
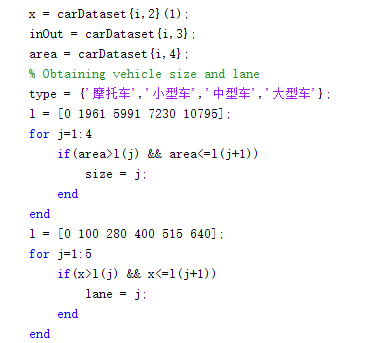
智能交通系统交通信息的提取主要都是通过监控视频来实现[6],主要功能是统计来往车辆的数量、实现测速、对车型进行分类,了解每个车道的车流量、占道信息以及平均速度等,有助于缓解道路拥堵,更好的分配车道,提高道路利用率。对此的大量需求以及系统维护的低成本进一步促进了该领域的发展,目前实现车辆目标的检测和跟踪,研究方向大都基于静态摄像机。
国外Viet-Hoa Do等人提出了用于测量标定后车辆的行驶速度的摄像机标定方法。这种方法简单鲁棒性好,并对摄像头安装位置无特殊要求。主要利用摄像机拍摄的地面上的等边三角形作为参考对象,并用来确定相机参数。然后使用运动矢量光流法,结合标定得到的摄像机参数来计算车辆实际的移动速度[2][7]。
2014年张帆把高速公路车道线作为关键,使用车道线划定测速区域。首先利用混合高斯背景模型来训练背景图像,从而检测和提取车道线。其次采取基于车辆特征点的光流跟踪法,确定车辆中心,通过虚拟撞线法来确定车辆的进入和离开。该方法使用车道线作为测算距离的参照标尺,解决了传统视频测速所需的摄像机标定的难点[2][8]。
随后国内巨志勇等学者在张帆学者提出的用高速公路车道线测量车辆的行驶速度的基础上,提取车身的特征并分析车道线的倾料角度,将车灯作为对应块,然后利用车灯的对称性筛选车灯带,实现车灯的准确定位,最后通过摄像机标定将车灯移动的距离转换到实际坐标中,解决了监控录像中拍摄角度的问题[9]。
1.3 车速检测技术概况
如今交通系统中常见的速度测量方法包括:1.多普勒雷达、2.激光雷达测速、3.视频测速。
1.3.1多普勒雷达
多普勒雷达即利用多普勒效应获得目标速度。工作原理具体为:雷达发射的脉冲波,当遇到活动目标后会出现频率差,即多普勒频率[10]。根据多普勒频率的大小以及发射与接收之间的时间差,可测出目标相对于雷达的径向相对运动速度以及距离。且脉冲多普勒雷达具有抗杂波干扰能力更强的优点,即通过频率过滤法既可以滤除干扰杂波,又可以检测出多普勒频率讲线,从而使雷达能够区分出目标信号与强杂波,可以检测出背景中的运动目标。
过去的多普勒雷达信号发射角大,在使用过程中易受到相邻车道车辆的干扰,导致测速产生偏差。如今使用的大多数多普勒雷达模型被称为“窄振幅”,这意味着脉冲触发角度非常小,在一定的距离内,脉冲的发送和接收可以限制在一个小范围内,以避免相邻通道的干扰。
1.3.2.激光雷达测速
由于激光具有指向性好,散射角度小的优点,一些雷达使用激光脉冲来测量速度,并发射和接收激光脉冲来计算目标速度。这种雷达速度精度高,可以实现“定点测速”[11],即可以在较短的时间间隔内完成小范围内的速度测量。抗干扰能力强,但成本高,稳定性差。
1.3.3.视频测速
视频测速是依靠速度公式实现的,如公式(1.1)所示:
 (1.1)
(1.1)
大多数情况下,Δt或是Δd的其中一个很容易获得,而利用其他得出另一个。在视频测速中,Δt是由于固定的帧间接获得的,Δd是间接获得的。而不是使用公式(1.1)进行速度计算,而是使用以下公式:
 (1.2)
(1.2)
其中,f(s)是单映射函数,s值表示位置,是实际应用中比较容易获得的值。假定函数f(s)的表达式是已知的,两个变量 和
和 的值,则可以通过f(s),由
的值,则可以通过f(s),由 和
和 计算得到,二者相减即可得到
计算得到,二者相减即可得到 ,实际测量可以直接得到
,实际测量可以直接得到 和
和 的值,从而可以由式(1.2)计算v的值。
的值,从而可以由式(1.2)计算v的值。
然而,利用公式求出的是在图像中的移动速度,而不是实际速度,得到的速度单位应该是公里/小时,而不是像素/时间[12]。因此,必须要找到 与的对应关系。从计算机视觉角度来看,s坐标(x,y,z)与d坐标(X,Y,Z)之间的矩阵关系为
与的对应关系。从计算机视觉角度来看,s坐标(x,y,z)与d坐标(X,Y,Z)之间的矩阵关系为
 (1.3)
(1.3)
1.4 论文结构与安排
第一章:主要介绍了目前基于视频的车辆测速的研究背景与现状以及相关技术综述。
第二章:简述了视频车速检测方法的原理。
第三章:描述了基于背景差法和Harris角点匹配测速系统的框架及实现原理。
第四章:基于 MATLAB 平台对两种测速系统进行仿真,记录实验结果,并对其进行小结。
第五章:针对两种测速系统实现的结果进行总结,比较其优缺点,并对系统存在的问题进行讨论,对未来方向的发展做出展望。
第2章 视频车速检测方法
2.1引言
目前,基于视频的车速检测方法主要包含两个方面技术:运动目标检测和运动目标跟踪。主要通过各种手段来获得汽车在视频画面中的运动轨迹,从而获得汽车的运动速度。目前使用的车速检测方法包括背景差分法、帧差法、车牌定位法、特征匹配法、虚拟线圈法等,其中速度的计算可以通过道路位移固定利用通过的时间来求出。
实现基于视频的速度检测有四个关键点:
1.首先是能在视频的不同车道中找到车辆目标的具体位置,可以通过背景差分法或者帧差法来确定车辆目标,也可以通过车辆的对应块进行查找,目前比较常用的对应块方法是车灯、车牌以及车轮,车灯比较适用于夜间,车牌运算量较大。因此根据不同要求能够采取合适的方法实现车辆目标的检测十分重要。
2.其次出于实时性的考虑,这就要求设计能够尽可能快地实现定位。众所周知,摄像头能够拍到的车辆运动的轨迹范围是有限的,因此需要在汽车经过摄像头有限的时间内找到汽车目标并且能够定位,这就要求要快,符合实时性。再者出于对道路安全的考虑,若是某辆车严重超速,那么这辆车经过的时间会更短,要做到很快定位并能够做出判断就要求实现车辆定位的算法要简单且准确。
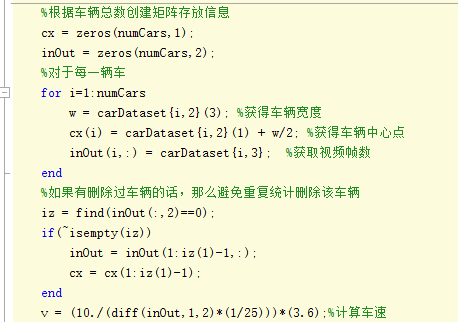
3.当然也需要严格控制帧率,计算车速需要的时间通常是在帧率固定的基础上求得的。
4.最后也要能够实现视频中车辆移动距离与实际坐标的转换,可以在视频的道路上设置两个框,在已知路面的实际距离基础上,简单地利用比例来计算车速。但是若想实现更为精确的测速,则需要使用摄像机的标定。
由于车速检测方法较多,本文主要介绍了背景差分法、车牌定位法[13]、车灯定位法以及虚拟线圈法。
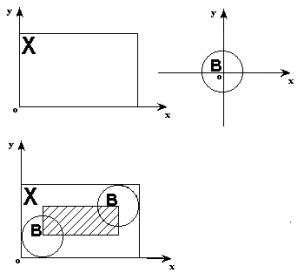
2.2背景差分法
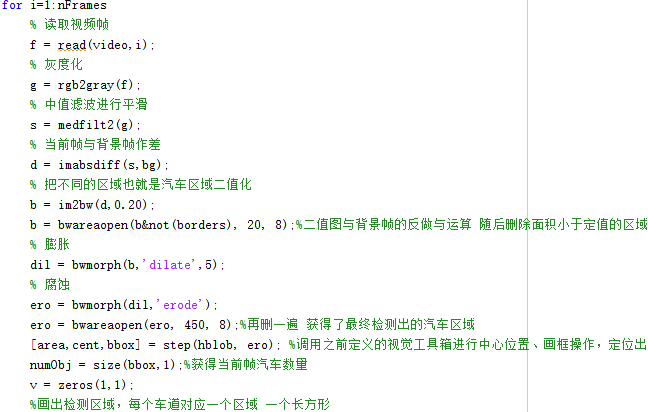
背景差法是常用的运动目标检测方法之一,具体流程如图2.1所示。它的基本思想是基于当前图像与背景图像之间存在的差异性来确定运动区域。也就是说,将输入图像与背景模型进行比较,通过判定灰度等特征的变化,或用直方图等统计信息的变化来判断异常情况和分割的运动目标的发生[14]。最简单和最常用的方法是直接提取视频序列中的特定图像,或计算多个图像的平均值作为背景。
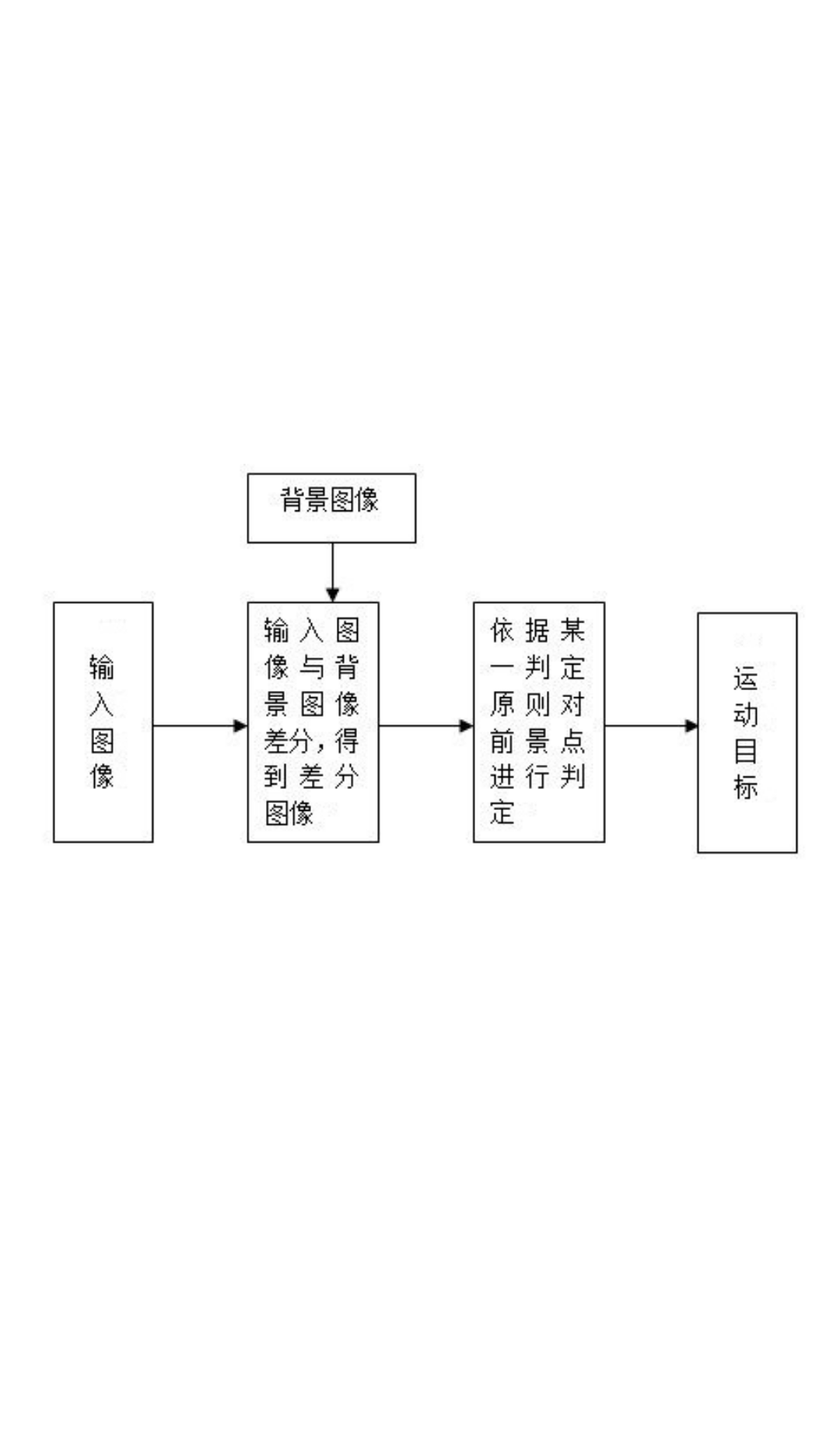
图2.1 背景差分流程图
预处理、背景建模、前景检测、背景更新大体上可以被归为背景差法的4个过程。对图像进行灰度化和滤波处理为预处理过程。目前大多数思路是基于多帧平均的方法来建模作为初始背景,能够消除因自然情况变化导致的背景变化所带来的影响,而针对背景固定的特性,可以将无车辆驶入的照片当作背景。当车辆经过时,可以通过从当前框中减去背景框来定位车辆即为前景检测。背景更新顾名思义,即对背景模型进行更新。
2.3车牌定位法
车牌识别的关键在于车牌定位、字符分割和字符识别三部分,其中车牌定位的准确与否直接决定后面的字符分割和识别效果,是车牌识别技术中最为关键的一步。车牌定位流程图如图2.2所示。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: