基于SIFT特征描述的物体识别毕业论文
2020-08-13 20:45:28
摘 要
图像处理的目的就是计算机通过辨别目标物体的特殊的地方即所谓的特征来进行判断与分析从而完成对目标物体的识别工作。所以图像处理的核心就是正确识别该图像的目标特征。本文提到的SIFT算法就是一种提取图像特征的算法。
Britih Columbia大学大卫.劳伊教授正式提出了一种以尺度空间为基础的图像局部特征描述算子——SIFT,这种算子能够在图像旋转,模糊,光照,缩放的条件下仍然具有很好的鲁棒性。而且有很强的抗噪性能。
本文就SIFT的这种对于目标物体旋转,模糊,光照,缩放的条件下仍然具有鲁棒性进行实验探究,并用最近邻法与之对比实现了这一目的。
关键词:图像处理 SIFT 鲁棒性
Abstract
The purpose of image processing is that the computer can judge the target object by distinguishing the special part of the object, that is called the characteristic, so as to complete the recognition of the target object. Therefore, the core of image processing is to correctly recognize the target features of the image. The SIFT algorithm mentioned in this paper is an algorithm for extracting image features.
Britih Columbia University Professor David Lowe formally proposed a scale space based local image feature description operator SIFT, the operator can rotate the image, blur, illumination, still has good robustness under the condition of zoom. And it has a strong noise immunity.
In this paper, we investigate the robustness of SIFT, which is robust to the rotation, blurring, illumination and scaling of target objects, and then compare it with the nearest neighbor method.
Keywords: image processing, SIFT, robustness
目录
摘要 1
Abstract 2
第1章 绪论 4
1.1 研究背景及意义 4
1.2国内外研究现状 4
1.3研究内容及组织结构 5
第2章 MATLAB 6
2.1 MATLAB概述 6
2.2 MATLAB发展史 6
2.3 MATLAB的基本功能 7
第3章 SIFT算法 8
3.1 构建尺度空间 9
3.1.1 尺度空间的提出及其发展历史 9
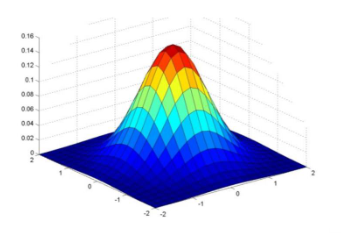
3.1.2 高斯模糊 10
3.1.3高斯金字塔及高斯差分金字塔的构建 12
3.2 定位关键点 13
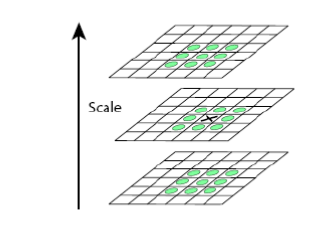
3.2.1 尺度空间极值点 13
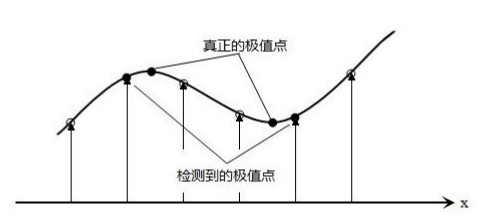
3.2.2 关键点过滤及精确定位 13
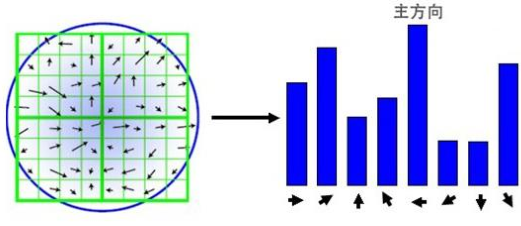
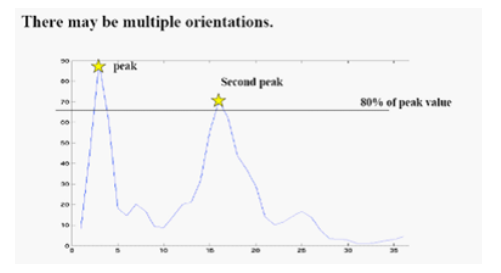
3.3 分配关键点方向 14
3.4 计算特征描述子 16
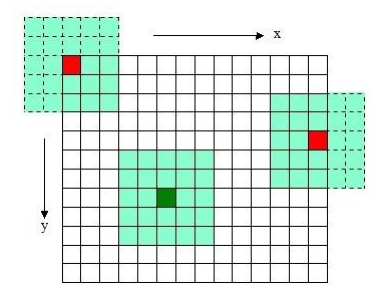
3.4.1 确定描述子所需图像区域 16
3.4.2坐标轴旋转及采样点分配 17
3.5关键点匹配 17
第4章 基于SIFT算法的物体识别 19
4.1 最近邻法 19
4.2 SIFT算法 26
4.3实验结果分析 31
第5章.总结与展望 32
5.1 内容总结 32
5.2 研究展望 32
参考文献 33
致谢 35
第1章 绪论
1.1 研究背景及意义
人类的视觉系统在人类的生活学习当中有着非常重要的作用,大约 有75% 的信息是人类通过眼睛感觉到的。但是人类的视觉系统有很多弱点,人类的主观意识很大程度的干扰到了视觉系统的判断,以及人类的精力毕竟是有限的并不能像机器一样保持持久的工作精度。以及人的视觉系统的图像处理不是高精度的视觉处理,并不能细致的判断出差别。如果把工作交给计算机工作则完全不一样,计算机可以通过自己高精度的计算来避免人类的错误,从而实现更加高效更加稳定的图像处理。
图像处理的目的就是计算机通过辨别目标物体的特殊的地方即所谓的特征来进行判断与分析从而完成对目标物体的识别工作。所以图像处理的核心就是正确识别该图像的目标特征。越是稳定的、有区别度的特征越是容易进行识别工作,所以人们一直都在研究能够提出这些特征的方法。Britih Columbia大学大卫.劳伊教授正式提出了一种以尺度空间为基础,能够在图像旋转,模糊,光照,缩放的条件下仍然具有很好的鲁棒性的图像局部特征描述算子——SIFT(尺度不变特征变换),这种算法集合了当时的以不变量技术为基础的特征方法最终被完善在2004年。Sift特征是不是一个图像的整体特征而是图像的某些特征,这个特性就使他对尺度缩放,模糊,光照还有旋转能保持不变性。SiFT算法具有多种优点,不仅高效、稳定而且多量可扩展。在图像处理各个领域中均能看到SIFT算法的身影,比如社区监控,指纹与人脸识别,航空航天,交通定位等等。由此看来SIFT算法非常具有研究价值。
1.2国内外研究现状
图像特征能从多个方面反应出图像具体信息,所以人们研究出了非常多针对特征提取的方法。一般我们会用到的的特征提取方法有很多:Mata提出了一种算子用来特征的提取,它具有很强的稳定性,他存在于一定的稳定区间内,尤其对于空间的几何变化有很强的鲁棒性;比较出名的特征检测算子还有SR算子,该算子基于显著性方法,提出他们的是Kadir等人;另外Harris算子也是比较常用的方法,他的主要面对的方向是角点检测算法,该算子的提取对象是目标图像的拐点,提出完后在进行配对;比较优秀的特征检测算子还有LOG算子,这种算子在角度变化方面有很强的稳定性,即使在目标图像被处理之后还是可以优秀的提取出特征。在众多方法中Lowe提出的SIFT算子是一颗闪耀的星,它作为尺度空间检测算子因为对图像的变形以及一定的视角变化具有的鲁棒性,所以SIFT算法被应用到了各种领域之中。
因为SIFT算法的众多优点,得到了大量的学者的关注,SIFT算法被进一步研究。该算法自诞生以来就因为计算困难,算法复杂被人们所诟病,所以人们研究的方向就是如何在保证SIFT算法的完整情况下尽量简化该算法的纷杂程度。这些年来SIFT算法被许多学者所改进。特征点提取和特征点描述以及特征点匹配是基于特征点图像匹配算法的三个主要步骤。
SIFT算法被前人不断完善改良,对比刚研究出来时已经进步了很多,然而它是图像特征匹配的核心,还有很大的改进空间。思考如何为特征提取提供更便利的环境比如说需要加快SIFT 匹配与提取特征的速度。为了解决存在模糊、旋转、缩放及遮挡图像的匹配问题,怎样为这样的图像匹配进行建模与仿真。比如为了深刻的体现出图像的本质属性,如何选择有效的算法流程结构以及匹配策略。上面的问题都需要我们来研究与完善。
1.3研究内容及组织结构
本文对基于SIFT特征描述的物体识别进行了研究,着重了解了图像特征提取的基本理论与技术。对SIFT的每一步的步骤都进行了详尽的阐述。然后通过不同角度及方向拍摄的图片经处理后来采用SIFT对其进行特征描述从而实现物体的识别。
相关图片展示: