使用两个加速度计和半色调方法的具有自动均匀照明区域的数字LED台灯外文翻译资料
2022-12-24 16:57:02
英语原文共 2 页,剩余内容已隐藏,支付完成后下载完整资料
毕业设计(设计)
英文文献翻译
Title:Digital LED Desk Lamp with Automatic Uniform Illumination
Area by Using Two Accelerometers and Halftone Method
使用两个加速度计和半色调方法的具有自动均匀照明区域的数字LED台灯
Chi-Huang Hung, Ying-Wen Bai, Jung-Ming Hsu, Po-Wen Chen, and Hsu-Yao Wu
摘要 :本文设计了一种可以在用户旋转灯时调节LED阵列中LED亮度的数字LED台灯,该LED 灯可以通过调节LED 阵列中的LED 亮度以此来获得均匀照明区域的阴影。该系统包含三个部分:LED光源,倾斜的测量单元和控制单元。当用户调整灯罩的位置时,系统可以通过测量两个加速度计的角度差来改变半色调图案以产生均匀的照明区域。
1. 引言
有很多关于讨论市场上各种带调光器的台灯的现存产品论文[1],但大多数使用几个大功率LEDPWM调光器来调节亮度。这种方法确实实现了有效的亮度调节,但通常对照明区域的调整整体集中在中间[2]。
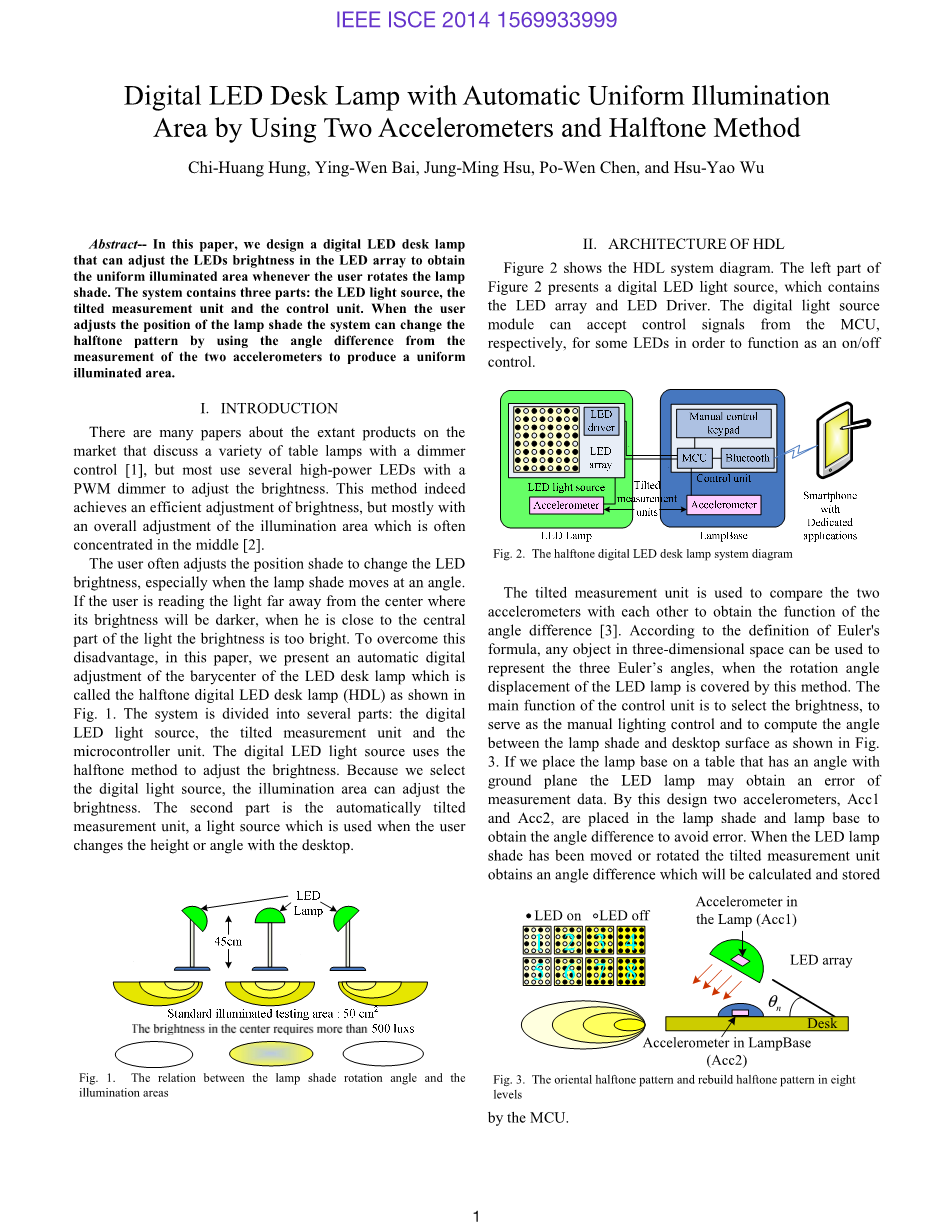
用户经常需要调整阴影位置来改变亮度。特别是当灯罩以一定角度移动时,如果用户正在远离光线中心的地方阅读,当他靠近中央时,偏亮部分的光线亮度就会过亮。为了克服这一缺点,在本文中,我们提出了一种被称为半色调数字LED台灯(halftone digital LED)的自动数字化调整LED台灯,如图1所示,系统分为几个部分:数字LED光源,倾斜测量单元和微控制器单元。数字LED光源使用半色调方法调整亮度,因此我们选择数字光源,这样照明区域就可以进行亮度的调节。第二部分是自动倾斜测量单元,光源在用户更改桌面的高度或角度被启用。
图1. 灯罩旋转角度与照明区域之间的关系
2. HDL框架
图2显示了HDL系统图。图2左边的部分显示了一个数字LED光源,其中包含LED阵列和LED驱动器。数字光源模块可以接受来自MCU的控制信号,对于某些LED,分别用作开/关控制。
图2. 半色调数字LED台灯系统图
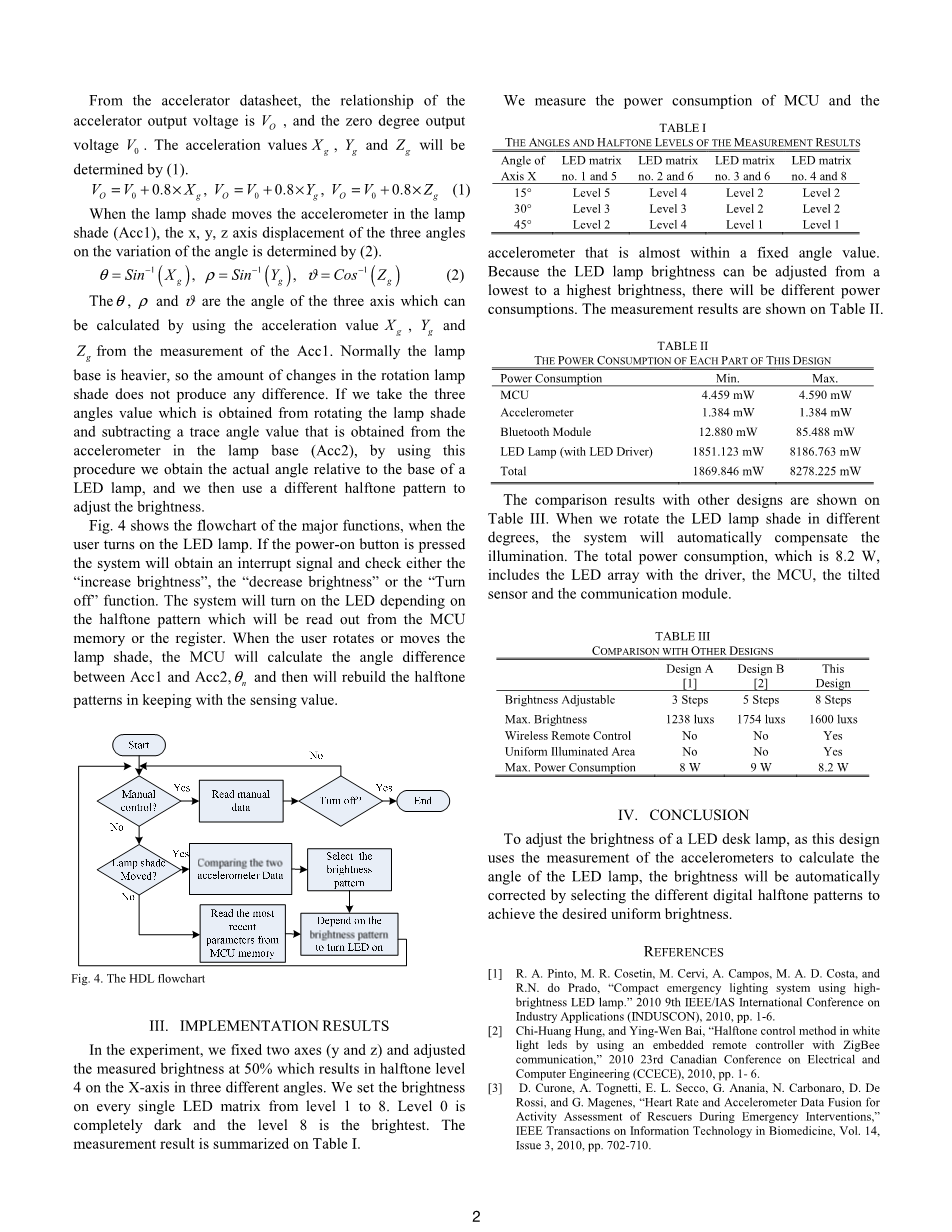
倾斜测量单元用于比较两者加速度计获得的功能角度差[3]。根据欧拉公式的定义,当旋转角度通过上述方法覆盖LED灯的位移时,三维空间中的任何对象都可以用来代表三个欧拉角。该控制单元的主要功能是选择用作手动照明控制并计算在灯罩和桌面之间角度的亮度。如图1所示。如果我们将灯座放在一个与地平面成角度的桌子上,LED灯可能会产生误差测量数据。通过这种设计,将两个加速度计,Acc1和Acc2,放在灯罩和灯座中获得角度差以避免错误。当LED灯阴影已移动或测量单元旋转倾斜时将获得由MCU计算和存储的角度差。
图3. 东方半色调方案和八个级别的重建半色调图案
在加速器数据表中,加速器输出电压为VO,零度输出电压V0。加速度值Xg,Yg和Zg他们之间的关系由(1)确定:
VO=V0 0.8times;Xg,VO=V0 0.8times;Yg,VO=V0 0.8times;*Zg (1)
当灯罩移动灯罩(Acc1)中的加速度计时,三个角度的x,y,z轴位移关于角度的变化由(2)确定:
theta;=Sin-1(Xg), rho;=Sin-1(Yg), v=Cos-1(Zg) (2)
rho;、theta;、v是通过计算由Acc1的测量出来的三轴的角度加速度值Xg、Yg和Zg来获得。通常是灯底座较重,所以旋转灯的数量变化阴影不会产生太大差异。如果我们拿三个通过旋转灯罩获得的角度值减去从灯座(Acc2)中的加速度计获得的跟踪角度值,使用此功能程序我们可以得到相对a基数的实际角度LED灯。然后我们使用不同的半色调图案调整亮度。
图4显示了用户打开LED灯主要功能的流程图。如果按下开机按钮,系统将获得一个中断信号并检查“增加亮度”,“降低亮度”或“转动关闭”功能。系统将依赖于从MCU读出的半色调图案记忆或寄存器打开LED。当用户旋转或移动时灯罩,MCU将计算角度差在Acc1和Acc2之间,theta;n然后将重建半色调模式,使之与感应值保持一致。
图4. 半色调LED流程图
3. 实验结果
在实验中,我们修复了两个轴(y和z)并进行了调整。测量的亮度为50%,这导致半色调水平4在X轴上以三个不同的角度。 我们设定每个LED 灯亮度在1到8的级别之内,0级是完全黑暗,8级是最亮的。该测量结果总结在表I中。
我们测量MCU和加速度计的功耗几乎在固定角度值内。因为LED灯的亮度可以a调整从最低到最高的亮度,这就会不同的功率消耗。
测量结果如表II所示。与其他设计的对比结果如表III。 当我们以不同角度旋转LED灯罩时,系统会自动补偿照明。其总功耗为8.2 W,包括带驱动器的LED阵列,MCU,倾斜传感器和通信模块。
表1 测量结果的角度和半色调级别
表2 该设计每个部分的功耗
表3 与其他设计比较
4. 结论
这样设计,使用加速度计的测量来计算LED灯的角度从而调整LED台灯的亮度,亮度会通过自动选择不同的数字半色调图案来校正,进而达到理想的均匀亮度。
参考文献
[1] R. A. Pinto, M. R. Cosetin, M. Cervi, A. Campos, M. A. D. Costa, and R.N. do Prado, “Compact emergency lighting system using highbrightness LED lamp.” 2010 9th IEEE/IAS International Conference on Industry Applications (INDUSCON), 2010, pp. 1-6.
[2] Chi-Huang Hung, and Ying-Wen Bai, “Halftone control method in white light leds by using an embedded remote controller with ZigBee communication,” 2010 23rd Canadian Conference on Electrical and Computer Engineering (CCECE), 2010, pp. 1- 6.
[3] D. Curone, A. Tognetti, E. L. Secco, G. Anania, N. Carbonaro, D. De Rossi, and G. Magenes, “Heart Rate and Accelerometer Data Fusion for Activity Assessment of Rescuers During Emergency Interventions,” IEEE Transactions on Information Technology in Biomedicine, Vol. 14, Issue 3, 2010, pp. 702-710.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20730],资料为PDF文档或Word文档,PDF文档可免费转换为Word



