基于51单片机的液晶显示倒车测距系统毕业论文
2020-02-17 23:21:21
摘 要
本文借助51单片机的编程软件Keil和仿真软件Proteus对一种基于51单片机的倒车测距系统进行了电路设计和程序编写。基于51单片机的开发环境这一倒车测距系统首先应具备一个距离测量模块,其次需要一个显示模块及时传递信息,最后需要一个报警模块提示使用者及时刹车。首先在显示电路和测距电路的模块选择方面本文对多种情况进行了比较,综合分析了每种模块的优缺点,其次考虑到选用模块的使用环境,最终选择使用超声波模块测量距离,使用1602液晶作为显示模块。本文所得的设计系统对于辅助驾驶员泊车具有重要的指导意义。
研究结果表明:该系统的超声波测距模块、液晶显示模块以及报警模块均可以正常工作,可以精确的实现在倒车情况下的距离测定,不存在测量延时的问题,基本达到预期设计目标且具有实用价值。
本文的特色:本文对单片机的基础原理有详细的介绍和讲解,对所使用的模块以及使用方法也记录详尽,作者设计思路清晰,在设计过程中不断简化流程得到最终的设计成品,旨在对读者进行单片机相关设计时提供一定的帮助。
关键词:51单片机;倒车测距;液晶;超声波
Abstract
In this paper, with the programming software of Kei1 and simulation software Proteus of 51 single-chip microcomputer, the circuit design and programming of a 51-microcomputer-based reverse ranging system are carried out. Based on the development environment of 51 single-chip microcomputer, this reversing distance measurement system should first have a distance measurement module. Secondly, a display module is required to transmit information in time. Finally, an alarm module is required to prompt the user to brake in time. Firstly, in the module selection of display circuit and ranging circuit, this paper compares various situations, comprehensively analyzes the advantages and disadvantages of each module, and secondly considers the use environment of the selected module, and finally chooses to use ultrasonic module to measure distance, use 1602 the liquid crystal is used as a display module. The design system obtained in this paper has important guiding significance for assisting driver parking.
The research results show that the ultrasonic ranging module, liquid crystal display module and alarm module of the system can work normally, and the distance measurement under reverse condition can be accurately realized. There is no problem of measuring delay, which basically achieves the expected design goal and has Practical value.
The characteristics of this paper: This article has a detailed introduction and explanation of the basic principles of the single-chip microcomputer. The modules used and the methods of use are also recorded in detail. The author's design ideas are clear, and the process is simplified in the design process to obtain the final design finished product. The reader provides some help when designing the microcontroller.
Key Words: 51 single-chip microcomputer; reversing distance measurement; liquid crystal; ultrasonic.
目 录
第1章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 1
1.3研究的主要内容 2
1.4本次设计应解决的关键问题 2
第2章 电路方案选择 3
2.1方案比较 3
2.1.1激光测距 3
2.1.2红外线测距 3
2.1.3超声波测距 3
2.2电路总体方案 4
第3章 单片机概述 5
3.1STC89C52主要性能 5
3.2STC89C52的外部结构及工作特性 5
3.3 STC89C52的内部组成 6
第4章 超声波测距技术 7
4.1超声波传感器介绍 7
4.2HC-SR04超声波测距模块 7
4.2.1HC-SR04超声波测距模块的优势 7
4.2.2HC-SR04超声波测距模块工作原理 8
4.2.3HC-SR04的电气参数以及管脚分布介绍 8
4.2.4HC-SR04超声波模块时序图 9
第5章 系统硬件电路设计 11
5.1STC89C52单片机最小系统 11
5.1.1单片机复位电路 11
5.1.2单片机晶振电路 12
5.2驱动显示电路及报警电路 12
5.2.1 1602液晶显示屏 13
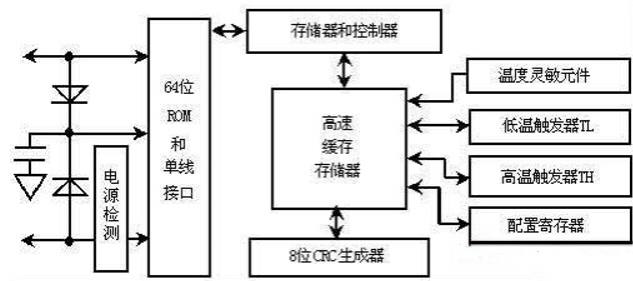
5.3温度检测电路 14
5.3.1温度检测方案分析 14
5.3.2数字温度传感器DS18B20 14
第6章 系统的程序设计 16
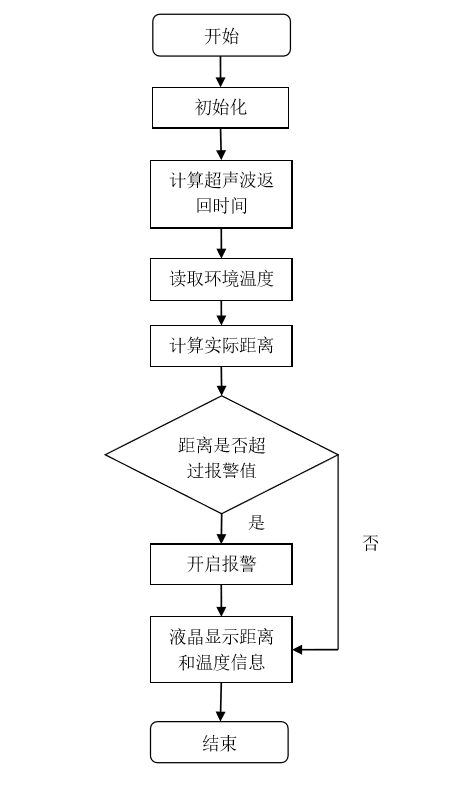
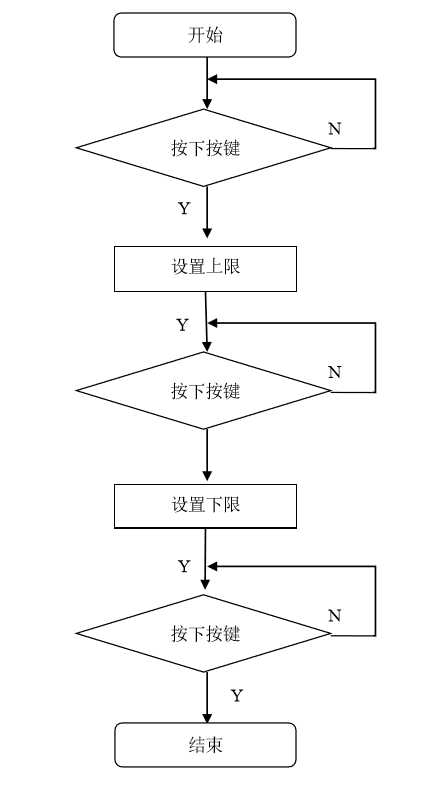
6.1系统主程序 16
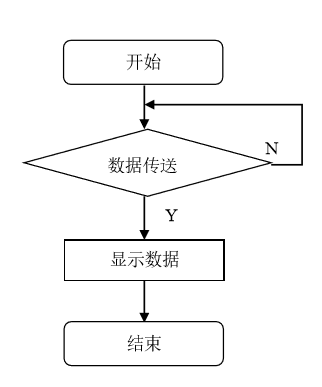
6.2显示部分子程序 17
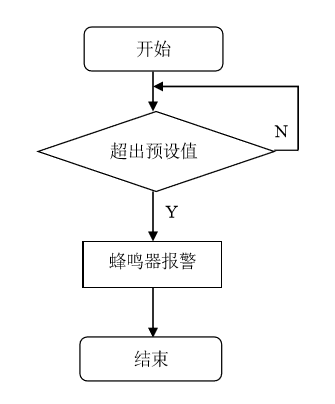
6.3报警及按键子程序 18
6.4超声波模块程序 19
第7章 电路仿真测试 21
7.1仿真软件的选择 21
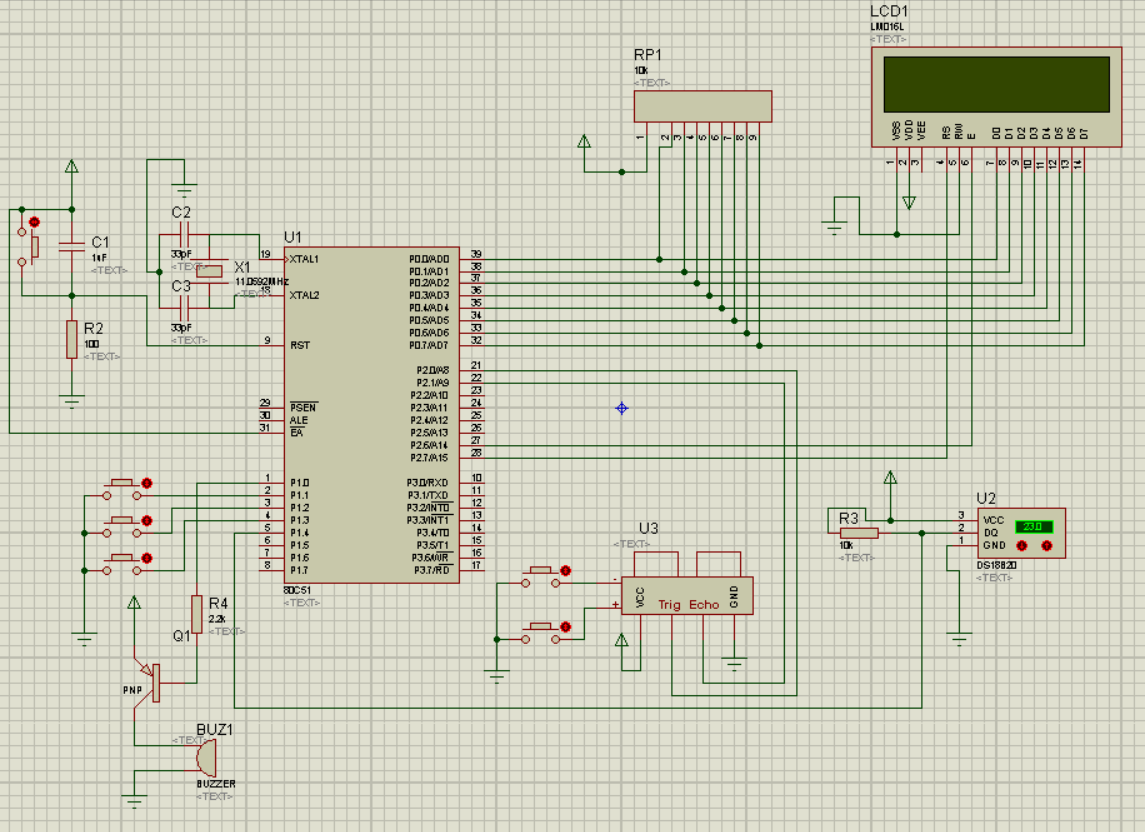
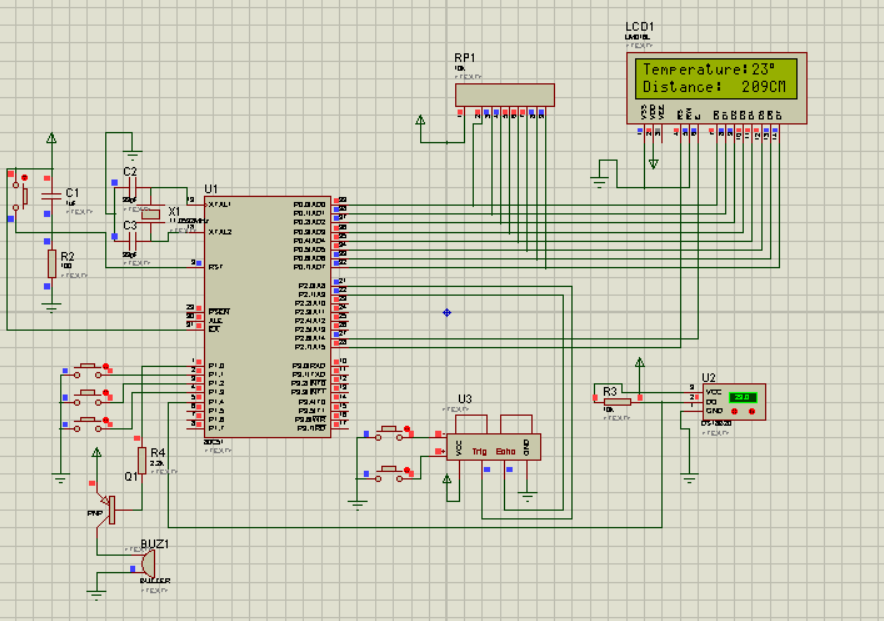
7.2原理图绘制 21
第8章 实物的制作与验证 24
第9章 结论 26
参考文献 27
附录A 电路整体原理图 28
致谢 29
第1章 绪论
1.1研究背景及意义
近年来单片机技术蓬勃发展,正因为单片机运行稳定,安全性较高且成本相比于其他途径是比较低的,所以单片机受到众多使用者的青睐因而其应用越来越广泛。现如今单片机这一类型的集成芯片已经融入到我们生活的各个角落,如果善于观察单片机可以说是随处可见。我们日常生活所使用的手机、智能家具、空调以及汽车电子设备等等物品中都可以找到单片机的身影。单片机集成度较高因此其本身的体积并不大,单片机的内部结构可以看成是普通计算机结构的简化版本。日常使用的单片机都带有多组扩展接口,具有很强的扩展性,因此可以通过适当添加一些外部电路来构成一个单片机系统实现多种多样的功能。单片机的数据处理能力并不比普通的计算机差,在单片机上应用合理的算法可以使单片机具有强大的计算能力以便于应用到工业中来实现工业设备的智能控制和监控。
超声波技术发展到今天已经是一种较为成熟的技术了,随着社会的智能化进程加快,超声波测距系统也在越来越多的场合发挥着作用。超声波测距技术在应用过程中并不需要与被测物体有实质性的接触,因此超声波测距技术受到的局限较少,在恶劣的环境中仍然可以正常使用。超声波测距技术目前主要应用于对地形图的测绘,土木工程相关领域的房屋修建、桥梁以及隧道等工程。除此之外超声测距在工业工程也具有很强的应用价值,比如用来测量管道的长度或者是某一深井里的液面深度。超声波测距技术使用起来方便快捷,计算也较为简单,其测量结果的精度也达到了现在工业施工的标准[1]。
1.2国内外研究现状
就我国目前的汽车研制来看,计算机辅助汽车驾驶的使用还很少见,用于倒车辅助的系统基本上仍停留在语音提示报警或者增加一个显示功能。中高档车型目前使用的辅助倒车系统可以将放置在车后的摄像头拍摄的画面实时传送到车载显示器上从而方便驾驶员安全倒车,此类系统虽然具有画面感,但是驾驶员是无法直观的感受到具体距离的。从另一方面来看,过多的图像信息会分散驾驶员的注意力,不利于安全。
在国外,美国、德国、日本等发达国家在技术上远远比我国走在前面。他们在汽车信息化方面起步较早,并且在半导体和微电子领域都有着较高的水平。这些国家的辅助倒车系统通常会配置超声波雷达摄像头,其中部分车型甚至已经实现了安全的自动泊车,这一系统的投入使用为技术不熟练的驾驶者节省了大量时间,也减轻了心理压力。该系统的功能模块并不复杂,分别是显示部分、声光报警以及超声波探测模块。国外对这一方面的研
究已经不单单局限于倒车系统,开始逐步衍生成为汽车避撞技术。这一技术可以在驾驶员行车过程中实时监控周围道路状况,预判行人以及车辆的状态,当遭遇紧急情况时可以优先于驾驶员操作避免意外交通事故发生。这一系统一旦研发成功可以大大解放驾驶者的行车压力,为自身及他人的安全提供更高的保障[2]。
1.3研究的主要内容
本次课题的设计内容为基于51单片机的液晶显示倒车测距系统。对于测距模块部分可以直接选用合适的测距模块来完成,显示部分与报警部分同理。本次设计的难点在于选择适当型号的模块并把它们的功能整合起来。首先拟定大致要实现的功能,其次结合汽车在行驶中的实际状态,尤其考虑倒车这一过程,最后确定需要的元器件开始电路设计部分。本次设计的电源部分为5v直流稳压电源。为保证该系统能正常工作,还添加了温度补偿传感器用于监测使用的环境温度。
1.4本次设计应解决的关键问题
首先是规划出硬件电路的整体组成,即硬件电路的设计,在实物制作过程中要考虑环境温度对测量结果的影响。
其次是软件编程设计,先分析每一个模块的编程方法然后再整合到一起,最后使用仿真软件对编程结果进行分析验证。若仿真结果通过便可以开始实物制作。
第2章 电路方案选择
2.1方案比较
2.1.1激光测距
激光测距仪的结构相对简单,激光本身具有单色性好和方向性强的特性因而在实际应用中用途广泛。激光测距仪测量距离的效率可以说是众多测距仪中较高的,测量的量程较大而且测量精度也相对较高。激光测距仪已经在很多领域都得以广泛的应用,但是在汽车方面应用的激光测距仪主要有以下两种,分别是成像式激光雷达和非成像式激光雷达。由于汽车在运行过程中并不稳定,同时还要考虑供电以及对人眼的伤害因此激光测距仪的光源被局限在半导体激光器。但是车载测距仪又对体积方面有较高的要求,激光测距仪在这一方面处于劣势。除此之外,激光测距的准确性受到外界环境的干扰较大,在恶劣气候条件下失去了使用价值。
2.1.2红外线测距
红外线处于人眼可见的光谱之外,红外线自身具有一定的热效应和穿透能力,当它应用于车载系统时可以通过分析前方物体的反射红外线的强弱和波长来综合判断前方物体的运动状态。红外成像技术同样可以作为夜间驾驶的辅助设备。这一系统的使用效果很好,但是存在价格过高的缺陷,目前只在一些高端车型上有所使用。对于倒车测距系统而言红外线测距仪有些大材小用。
2.1.3超声波测距
超声波测距的原理非常简单,它的测距原理与现在军事上经常使用的雷达非常相似。超声波既可以看成是一种波动形式也可以看成是一种能量形式,它以波动形式传播,本身负载一定的信息,传播时具有一定的方向性和穿透能力,在空气中传播时不容易发生信号衰减现象,反射效果较好,超声波测距仪就是依据超声波的反射特性而制成的。超声波在空气中的传播速度虽然会受到环境温度影响而有所变化,但是这些数据都是已知的。若需要测得两物体之间的距离只需要计算超声波从发出到被物体返回的时间间隔即可,通过速度时间公式计算就可以测得距离了。超声波测距仪在工作时每间隔一定时间就会沿特定的方向发射出超声波,系统本身会记录超声波发出与遇到障碍物返回之间的时间间隔。超声波测距的缺点就是声波速度会根据使用环境的温度的改变而变化,不同的室外温度对应不同的超声波声速,仅添加一个温度传感器就可以解决这一问题。其次超声波的能量会随着距离的增加而减少,因此其测量范围不宜超过10米,理想范围是4-5米。对于高速行驶的车辆,超声波测距仪是不适用的[3][4]。
从以上三种方案中可以看出,超声波测距的工作原理较为简单,相应的硬件电路设计和软件编写也较为简单,同时超声波测距的成本较低,实用性较高。考虑到汽车在倒车过程中的行驶速度较慢,汽车车体自身的空间有限以及倒车测距所测量的范围较小等问题,因此超声波测距更加适用于倒车测距系统,故本次倒车测距系统选用超声波测距的方法。
2.2电路总体方案
根据倒车测距系统的实际需要可以知道该系统的组成应包括以下几个部分。首先选用51单片机最小系统用于系统的整体控制,超声波测距模块选择的型号是HC-SR04主要用于进行距离测算。按键电路部分使用轻触开关,设置可以调节报警距离,使用者可以根据自身的需要和驾驶技术水平来选择倒车时需要得到提示的距离。选用蜂鸣器对检测到的障碍物进行报警以便提醒该系统的使用者对障碍物及时做出反应。本次设计的显示电路需要同时显示障碍物距离以及环境温度,若采用数码管显示,显然一个数码管是不足以满足的,若选用多个数码管的方案则程序编写较为复杂,且可能涉及到单片机I/O的扩展问题,点阵显示的字符过于生硬亦不是最佳选择,因此本系统最终选用1602液晶作为显示电路。电路整体采用5V电源进行供电。由于超声波的传播速度是会受到外界温度影响的,且这一影响不可忽略,因此该系统还加入了温度补偿模块,单片机根据温度补偿模块测得的温
度来找到对应的超声波传播速度进而计算出障碍物的距离。该电路的整体框图如图2.1所示[5][6]。
图2.1 倒车测距系统原理框图
第3章 单片机概述
3.1STC89C52主要性能
STC89C52 是STC公司生产的一种芯片,它与STC89C51单片机一样都隶属于AT系列,这两款单片机都非常的经典,就其本身性能而言较为一般,由于其价格较低,现阶段通常作为教学工具使用。在学习单片机相关课程时大部分同学会选择购买基础款的51系列单片机用做自身课外练习使用。通过对51系列单片机应用的练习可以为其他型号单片机的使用打下基础,提升自身处理嵌入式问题的能力。51系列的单片机和52系列基本上相同, 52系列单片机可以看成是51系列的增强版,内部存储器更大还额外增加了一个定时器。目前鉴于STC89C51这一型号系统内存较小,且全部功能都可以由STC89C52代替所以这一型号已经停产了,其他方面两者是完全兼容的。
3.2STC89C52的外部结构及工作特性
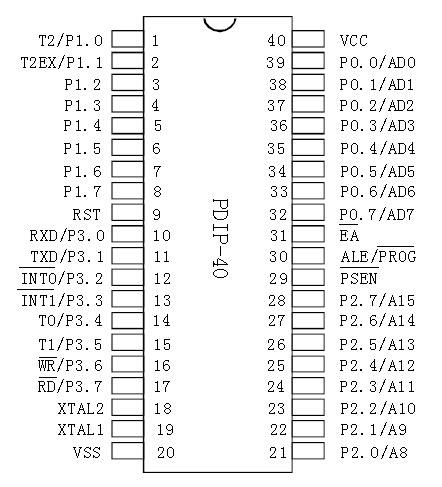 这款单片机的外形封装有三种形式。第一种是我们常见的双列直插式封装,简称为PDIP,成品共有四十个引脚,其封装图如图3.1所示。该款芯片也可以选用薄四方扁平封装或者是特殊引脚芯片封装,后面两种封装形式成品均为正方形其自身 带有四十四个引脚,但其中四个引脚是不使用的。
这款单片机的外形封装有三种形式。第一种是我们常见的双列直插式封装,简称为PDIP,成品共有四十个引脚,其封装图如图3.1所示。该款芯片也可以选用薄四方扁平封装或者是特殊引脚芯片封装,后面两种封装形式成品均为正方形其自身 带有四十四个引脚,但其中四个引脚是不使用的。
图3.1 STC89C52引脚图
3.3 STC89C52的内部组成
STC89C52虽然体积不大,但是在芯片的内部集成了多个功能模块,其中包括芯片的核心:中央处理器、用于存放代码的只读程序存储器和存放数据变量等数据的可读可写数据存储器、定时器和计数器、硬件看门狗以及具有多种功能的四组输入输出端口。从这款单片机的构成来看基本已经达到了一台计算机的基础配置。
为了更清晰的了解STC89C52单片机的内部结构,本文作者将其整理成为表3.1。
表3.1 STC89C52单片机内部结构
名称 | 数量 | 备注 |
中央处理器 | 1个 | 8位 |
数据存储器 | 1个 | 256B |
程序存储器 | 1个 | 8KB |
定时器/计数器 | 3个 | 16位 |
I/O口 | 32个 | 双向可编程 |
片内振荡器和时钟 | 1个 | 12MHZ |
中断 | 4路 | 两个优先级嵌套 |
全双工异步串行口 | 1个 | 可编程 |
看门狗 | 1个 | 最高优先级 |
总线扩展控制电路 | 1组 | 64KB |
第4章 超声波测距技术
4.1超声波传感器介绍
超声波顾名思义,可以理解为频率超高的声波,科学上定义超声波为频率高于两万赫兹的声波。处于这一波段的声音是我们人类的耳朵无法感知的,因此使用在工业以及其他领域使用超声波技术很少会对人类的正常活动带来影响。超声波可以沿着一定的方向进行传播且当输出功率较高时和以传播很远的距离,这一特点也使得超声波可以在军事领域有较多应用。超声波传播时需要的介质不受限制,在我们日常中接触到的固液气三态物质中都可以较好地传播,除此之外在固溶体这种类型的介质中传播也不受影响,因此超声波可以应用的领域很广。日常生活中可以接触到超声波洗牙,医生在实际操作过程中会混合水一起进行,因为超声波在液体中传播时的音波压强可以达到真空甚至是负压状态,在牙齿表面产生强烈的冲击从而清洁牙石[7]。
超声波虽然震动频率很高但仍属于声波的一种,同时也具备波应具备的性质,超声波测距仪就是利用波的反射性质制成的。从超声波传感器工作的本质来看是一个能量转换的过程,其中压电晶体类型的超声波传感器是将电源提供的电能转换为机械震荡从而产生超声波。目前所使用的超声波传感器都同时具有超声波的发射与接受功能,较为先进的超声波传感器还自身带有温度补偿功能和数据处理功能,不需要外部设备的辅助就可直接使用。
4.2HC-SR04超声波测距模块
目前较为常用的超声波模块型号有URM37,它的默认接口形式为232但是也可调整为TTL接口。除此之外还有一款型号为URM05大功率的超声波传感器,URM05元件的测量限度可以达到10米左右,可以说是超声波模块中测量距离较远的了。除此之外,国外较常用的超声波模块是SRF系列,考虑到本次倒车测距系统的使用环境以及对模块的要求最终选用了HC-SR04超声波测距模块。
4.2.1HC-SR04超声波测距模块的优势
首先该模块的性能稳定,精度也较高,用于保障车辆和驾驶员安全的倒车测距系统中实用性较高。其次,该模块的体积较小,主要体积用于两个发射部分,而接收部分的体积已经缩小到了极限,搭配集成度较高的单片机可以降低产品的体积。该模块的发射部分与接受部分是紧紧相连的,这样的布局形成了与被测目标之间接近于直线的关系,同时它的测量盲区较小,只有在10毫米范围内才会形成三角形区域,造成测量误差。最重要的一点是这一模块的测量周期很短,当检测范围出现高速移动的目标时不会出现检测不到的情况[8][9]。
4.2.2HC-SR04超声波测距模块工作原理
该超声波测距模块的检测范围是2厘米到400厘米,检测方式是非接触式测量,它的测量精度可以达到3毫米,性能较为稳定且使用盲区较小,应用于倒车系统时安全性较高。HC-SR04模块可以完成超声波的发射与接收,除此之外还有一个控制电路。该模块初始化时需要将出发控制信号端口和回响输出端口都定义为低电平。当这一模块开始工作时需要利用单片机的I/O口向HC-SR04的TRIG引脚输入一个高电平触发信号,此信号的持续时长不得少于10微秒,否则无法被检测到。触发信号使得HC-SR04开始工作,并开始发出频率为40KHZ的方波信号。这一信号在传播途中遇到障碍物时会被反射回来重新被HC-SR04接收,检测到有信号被接收时回响信号输出端口产生一个持续一定时常的高电平信号,它的持续时长就是超声波从发射到被返回所消耗的时间。由此我们可以知道障碍物的距离是介质中的声音传播速度与高电平信号时常乘积的一半。该模块的检测周期为10毫秒,若超过10毫秒回响信号输出端口仍没有输出高电平则系统认为在所测量的范围之内是不存在障碍物的[10][11]。
4.2.3HC-SR04的电气参数以及管脚分布介绍
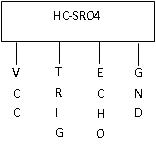 HC-SR04超声波模块的引脚共有四个,主视图角度观察从左到右依次是是:5V的电源接口(VCC)、出发控制信号输入端口(TRIG)、回响信号输出端口(ECHO)以及地线(GND),该模块的管脚排列图如图4.1所示。
HC-SR04超声波模块的引脚共有四个,主视图角度观察从左到右依次是是:5V的电源接口(VCC)、出发控制信号输入端口(TRIG)、回响信号输出端口(ECHO)以及地线(GND),该模块的管脚排列图如图4.1所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: