基于UR5多协作机器人的数字孪生系统研究开题报告
2020-02-18 18:35:49
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等。通过人与智能机器的合作共事,去扩大、延伸和部分地取代人类专家在制造过程中的脑力劳动。它把制造自动化的概念更新,扩展到柔性化、智能化和高度集成化。推进智能制造,能够有效缩短产品研制周期,提高生产效率和产品质量,降低运营成本和资源能源消耗,加快发展智能制造,对于提高制造业供给结构的适应性和灵活性、培育经济增长新能动都具有十分重要的意义。
工业互联网作为新一代信息技术与制造业深度融合的产物,不仅能为制造业乃至整个实体经济数字化、网络化、智能化升级提供新型网络基础设施支撑,还不断催生新模式、新业态和新产业。工业互联网平台作为工业互联网实施落地与生态构建的关键载体,正成为全球主要国家和产业界布局的关键方向。工业互联网平台的核心是工业paas平台,而工业paas平台的核心是数字化模型。工业互联网平台要想将人、流程、数据和事物都结合在一起,必须有足够的工业知识和经验,并且把这些以数字化模型的形式沉淀到平台之上,即把工业的技术原理、行业知识、基础工艺、模型工具规则化、软件化、模块化,并封装为可重复使用的组件。
2. 研究的基本内容与方案
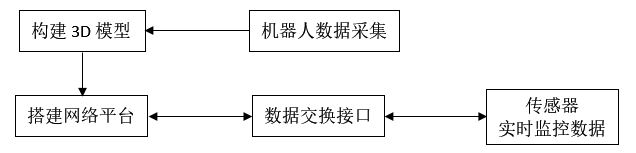
本课题在深入研究机器人物理参数和运动逻辑的基础上,建立机器人的三维空间模型库,设计基于javaweb的数字孪生平台,完成ur5多协作机器人的实时运动参数的在线监测。
本课题针对ur5多协作机器人的数字孪生系统,从真实机器人数据采集、机器人数字模型建立、javaweb平台建立和基于tcp/ip协议的数据通信四个方面进行数字孪生平台的设计。
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉相关工具软件的使用。
第6-9周:实现机器人的建模和机器人的实时运动参数获取。
4. 参考文献(12篇以上)
[1] schleich b, anwer n, mathieu l, et al. shaping the digital twin for design and production engineering[j]. cirp annals - manufacturing technology, 2017:s0007850617300409.
[2] uhlemann h j, lehmann c, steinhilper r. the digital twin: realizing the cyber-physical production system for industry 4.0[j]. procedia cirp, 2017, 61:335-340.
[3] schroeder g n, steinmetz c, pereira c e, et al. digital twin data modeling with automationml and a communication methodology for data exchange[j]. ifac-papersonline, 2016, 49(30):12-17.



