基于力反馈的柔性机械手控制策略设计实现开题报告
2020-02-18 19:24:19
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
随着智能制造飞速发展,工业机器人作为一种先进的制造装备扮演着不可或缺的角色。通过对机械手的研究,改变了人力大小难以准确控制的难题,可以精确地控制力的大小来抓取物品,避免了对物品的伤害。由于需要完成各种各样的任务,机器人需要各种不同的末端执行器来完成物料的抓取。在食品包装、农业采摘等行业,对于柔软或酥脆物品的抓取一直是机器人技术应用的难点。如何使机械手自动检测物体信息和夹持力信号,准确地识别物体的软硬程度、重量、表面情况等信息,精确控制抓取力的大小,是目前国内外智能机器人研究的重点之一。
由于柔性机械手是模仿人手,它的五个手指和手掌的仿人机械手具有极强的功能和很高的通用性,因而它可以代替人手在很多场合下完成各类复杂和灵巧的操作。例如,机械制造,军事战备,医疗手术,设备安装,家务劳动等。
2. 研究的基本内容与方案
本课题是基于力反馈的柔性机械手控制策略,在设计搭建柔性机械手之后,用matlab和labview使其按照指定想法工作,再引入力反馈来监测其力度和准度,用迭代算法来减少误差,以此来确定其最佳的工作方式和适应不同环境工作的能力。
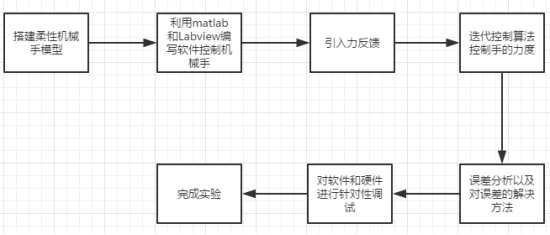
图1 基于力反馈的柔性机械手控制策略研究设计流程图
3. 研究计划与安排
(1)第1-4周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
(2)第5-6周:熟悉掌握基本理论,完成英文资料的翻译,熟悉相关工具软件的使用。
(3)第7-9周:实现控制算法,利用simulink实现仿真验证。
4. 参考文献(12篇以上)
[1]李国昌,赵成,李蕊,迟源,李秀芳.某自动化流水线搬运机械手的仿真与试验分析[j]. 包装工程. 2018(15)
[2]王守城,王熙,段俊勇,王小冲.基于matlab的冲床上下料机械手运动学分析[j]. 机械设计与制造工程. 2018(06)
[3]童俊华,程培林,武传宇,娄海峰,贺磊盈,谢奇志,孙良. 堆聚态采血针管自动分料拾取机械手研究[j]. 包装工程. 2018(03)



