基于YOLO v3的智能驾驶行人检测算法研究开题报告
2020-02-18 19:28:54
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
当今社会,汽车已经成为人们日常出行中非常普通的交通工具,城市道路上汽车数量的增加不仅导致了城市道路拥堵,而且还严重影响了道路交通安全,尤其特大城市的道路安全形势更为严峻,每年都有大量的汽车交通事故发生,行人作为道路上的弱势群体,因没有安全防护往往成为交通事故中最大的受害者,因此要保证道路上行人的安全,我们国家相关部门除了制定相关法规准则,提高行人安全防范意识还可以从技术层面去减少行人受到伤害的机率。
近几年来,随着人工智能技术获得重大进展,众多科技企业开始进军智能驾驶汽车领域,目标的检测技术已经受到越来越多的关注。在对目标检测的研究中,将行人检测技术应用到智能汽车的安全辅助驾驶系统成为相关专家和汽车制造企业研究的一个热点。行人检测技术研究的目标就是通过车载摄像头获取汽车前方的道路视频信息,对检测到的行人进行短时跟踪,做出安全预警,提醒司机注意行人。因此,行人检测技术应用到汽车安全驾驶系统能在一定程度上保障行人的安全。
2. 研究的基本内容与方案
通过阅读近年行人检测领域内的经典综述文章,进一步掌握该领域的发展动态。自从2012年深度学习技术被应用到大规模图像分类以来,研究人员发现基于深度学习学到的特征具有很强层次表达能力和很好的鲁棒性,可以更好的解决一些视觉问题。因此,深度卷积神经网络被用于行人检测问题是顺理成章的事情。
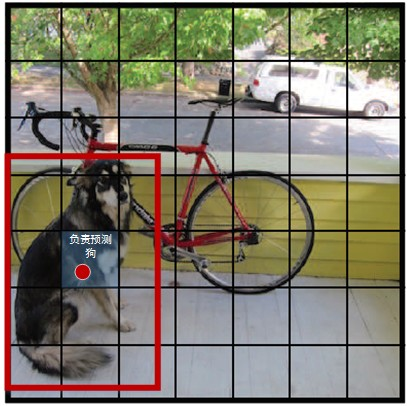
学习掌握深度学习的基本知识,了解目标检测的各类算法及其创新和技巧。仔细研读yolo系列文章,理解yolo算法与其他基于神经网络的目标检测算法的区别和创新。yolo将输入图像分成sxs个格子,若某个物体 ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这个物体。每个格子预测b个bounding box及其置信度(confidencescore),以及c个类别概率。bbox信息(x,y,w,h)为物体的中心位置相对格子位置的偏移及宽度和高度,均被归一化。置信度反映是否包含物体以及包含物体情况下位置的准确性。
3. 研究计划与安排
第1-3周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
第4-5周:熟悉掌握基本理论,完成英文资料的翻译,熟悉开发环境。
第6-8周:编程实现各算法,并进行仿真调试。
4. 参考文献(12篇以上)
[1] dollar p, wojek c,schiele b, et al. pedestrian detection: a benchmark[c]//2009 ieee conference oncomputer vision and pattern recognition. ieee, 2009: 304-311.



