Mecanum轮式工业AGV室内导航与自动驾驶系统设计开题报告
2020-03-01 09:32:08
1. 研究目的与意义(文献综述)
1.1研究目的及意义
伴随着计算机、传感器、控制工程、人工智能等技术理论的不断完善,有关机器人的研究与应用已经发展到了一个崭新的阶段。移动机器人作为其中一个重要的分支,其应用领域也在不断地扩大,包括了工业、国防、医疗、物流等各个领域。
早在60年代,就已经开始有关于移动机器人的研究,关于移动机器人的研究涉及许多方面。首先,要考虑移动方式,可以是轮式的、履带式、腿式的,对于水下机器人,则是推进器。其次,必须考虑驱动器的控制,以使机器人达到期望的行为。最后,必须考虑导航或路径规划。因此,移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。由于对移动机器人的研究,提出了许多新的或挑战性的理论与工程技术课题,引起越来越多的专家学者和工程技术人员的兴趣,更由于它在军事侦察、扫雷排险、核、化污染等危险与恶劣坏境以及民用中的物料搬运上具有广阔的应用前景,使得对它的研究在世界各国受到普遍关注。
2. 研究的基本内容与方案
本文以mecanum轮式工业agv为研究对象,在beckhoff驱动器中搭建软plc系统开发环境,使用软plc系统对mecanum轮式工业agv进行驱动,并基于激光雷达传感器实现基础的agv室内导航与自动驾驶。
本设计首先需要了解实验室现有的基于beckhoff驱动器和sick激光雷达的mecanum轮式工业agv的运行原理、软硬件架构和驱动方法;其次学习软plc系统的编程与开发等相关技术;然后学会软plc系统的使用方法和基本的python、c 或梯形图编程技术;最后熟悉slam等室内构图与导航算法的基础内容,从而能实现基于激光导航的agv运动。
整个agv的硬件架构分为以下几个模块:工业pc控制器,伺服驱动控制系统,激光导航系统。硬件架构如图1所示。整个系统的核心是beckhoff工业pc控制器,负责人机交互,包括指令参数输入、参数状态显示以及相关算法的实现,在其中进行软plc程序编写和运行,对伺服控制系统发出指令进行运动控制,从而使麦克纳姆轮开始运动。激光导航仪确定agv的当前位姿,然后将参数反馈到软plc系统并与期望位姿比较,来确定agv的运动控制参数。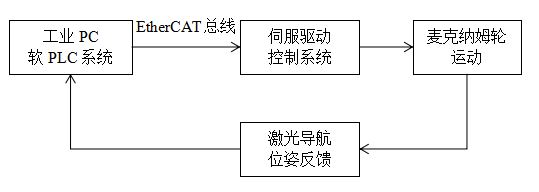
3. 研究计划与安排
第1-3周:查阅agv相关文献资料,明确研究内容,学习毕业设计研究内容所需理论的基础。确定毕业设计方案,完成开题报告。
第4-5周:熟悉掌握麦克纳姆轮、激光导航等基本理论,完成英文资料的翻译。
第6-9周:搭建并熟悉软plc系统开发环境,编写代码进行仿真。
4. 参考文献(12篇以上)
[1] schueftan d s, colorado m j, bernal i f m. indoor mapping using slam for applications in flexible manufacturing systems[c]. automatic control. ieee, 2015:1-6.
[2] zhu s, guo q. ladrc-based agv trajectory tracking controller design and parameter tuning[j]. beijing huagong daxue xuebao. 2017, 44(4):95-100.
[3] hajjaj s s h, sahari k s m. establishing remote networks for ros applications via port forwarding: a detailed tutorial[j]. 2017, 14(3):172988141770335.



