局部运动模糊的图像恢复算法研究外文翻译资料
2023-05-23 16:00:20

英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
局部运动模糊的图像恢复算法研究
摘要
在本文中,我们的目标是恢复局部运动模糊。 在构建局部运动模糊基本模型的基础上,分析了局部运动模糊的形成机制,提出了一种针对复杂背景下的局部运动模糊的新的恢复算法。 在算法中,简化了复杂背景下模糊图像恢复的问题。 首先,从复杂背景中提取模糊部分,然后将其粘贴到具有单色背景的底部。 在单色背景中恢复后,恢复的部分被粘贴回原来的复杂背景。 所有的操作都可以在空间领域完成。 因为单色背景的模糊图像的恢复更容易,所以本文提出的算法简单,快速,有效。 这是模糊图像恢复的有效方法。
关键词 局部运动模糊;复杂背景 ;物理方法;图像恢复
I.引言
在图像形成过程中,许多原因将导致图像的退化。降解系统可以是线性,加性,空间常数或非线性,不添加,空间变量。在图像系统中,存在许多退化的来源。一些退化因子仅影响图像中某些个体斑点的灰度;其他降解因素可能会使空间区域变得模糊。前者称为退化点,后者称为空间退化[1]。运动模糊是典型的退化模型之一。
在相机的工作过程中,目标和相机之间的相对运动将导致图像的运动模糊。因此,运动模糊图像的恢复算法已成为图像处理领域的研究热点。许多原因可能导致运动模糊,这可以分为以下两类:一种是压缩模糊,这是由于在工作过程中相机的位移引起的,这将导致整个图像的模糊;另一个是局部运动模糊,这是由于目标摄影领域中的一些物体的运动引起的。后一种情况将在本文中进行研究有许多方法用于消除模糊,包括使用硬件或软件的方法。对于硬件方法,Nayar构建了一个混合摄像机,可以在图像集成期间测量自己的运动[2]。在曝光时间内,通过自动测试相机的移动速度来确定模糊参数。然后使用逆滤波器恢复原始图像。但是为了估计运动模糊参数,需要混合照相机,成本很高。另一种方法是棱镜优化[3]。惯性传感器用于补偿摄像机的运动。这种方法通常用于解决相机抖动引起的模糊,并且当相机的曝光时间短时,效果很好。刘设计了一种特殊的CMOS传感器[4]。传感器用于判断是否存在运动。当测试运动时,停止图像的整合。所以,运动模糊被抑制。但是该方法的设计过程很复杂,不适合不断变化的目的。因此,软件方法被广泛用于消除图像模糊。
使用软件方法,当我们继续恢复图像时,我们可以在频域中进行,也可以在空间域中进行[5]。 恢复方法可分为两类:无约束恢复和约束恢复。 无约束恢复是图像恢复过程不受其他约束条件限制的一种方法。 这种方法似乎很容易得到所需的结果,但并不是这样,特别是当噪声被考虑在内的时候[6]。 因此,为了在数学中更容易处理图像,在恢复过程中经常添加约束条件,并且通过这些条件来最小化参数。 这种方法称为约束恢复。 维纳滤波器和约束最小二乘滤波是两种典型的约束恢复方法
维纳滤波器可归因于去卷积(或反向滤波)算法。 它首先由维也纳提出。 从维纳获得的图像的频域表达式为:
其中是降级函数的重复共轭,k是经验值,其值取决于某些图像和噪声,林认为维纳滤波器的误差主要来自边缘误差[8]。 通过增加滤波器参数k,可以减小边缘误差,但可以减少去除图像的分辨率。 当kge;0.01时,图像具有明显的重影效果。
维纳滤波器首先应用于一维信号,取得了很好的效果。 然后将其引入二维信号处理,并取得了令人满意的效果,特别是在图像恢复领域。 由于维纳滤波器具有良好的恢复效果,计算量少,抗噪声性能更好,已广泛应用于图像恢复领域。 维纳滤波器不断改进。 许多有效的恢复算法是基于维纳滤波器的。 维纳滤波器是统计学意义上的一系列图像的最佳恢复。 具有自动抑制放大的能力,噪声更强,效果更明显。 它避免了逆滤波器中出现的噪声的过度放大。
约束最小二乘滤波可以表示为:
要选择合适的s值,可以使用迭代。 但公式必须满足以下约束条件:
默认情况下,约束是平滑度约束。只有噪声的均值和方差是必要的,并且可以通过劣化图像容易地实现。在约束最小二乘滤波器和维纳滤波器之间进行比较。 结果表明,随着高噪声或中等噪声,约束最小二乘滤波器的有效性和低噪声,两种方法具有相同的表示。 要获得良好的反转效果,必须提供PSF和噪声功能。
另外,最大熵恢复方法[9-10],Lucy-Richardson非线性滤波[11-12],盲法恢复方法[13]都具有相应的特征,在某些情况下,它们都具有很好的应用。
由于模糊图像恢复处理与多个领域有关,成为重要的研究课题。 复杂背景下局部运动模糊和复原的问题总是在模糊图像恢复领域面临困难。 在本文中,研究了局部模糊的基本原理。 并提出了基于物理方法的模糊图像恢复算法。 实验结果表明,该算法快速有效。
Ⅱ本地运动的原则
1.水平均匀速度模糊
水平均匀速度模糊是最简单的。根据水平均匀模糊,wecan研究运动模糊的基本方法。 模糊运动图像是在运动期间通过像素的相互叠加而包裹的拖尾拖尾。 因此,物理原理可以用于模拟图像模糊。实际模糊模型和物理模型之间的唯一区别是实际模型的点是连续的。 但是数字图像中的点是分散的,所以在图像的模糊模拟中,模拟图像将出现锯齿波,并且影响与实际模型有一些差异。这是数字图像的常见故障。
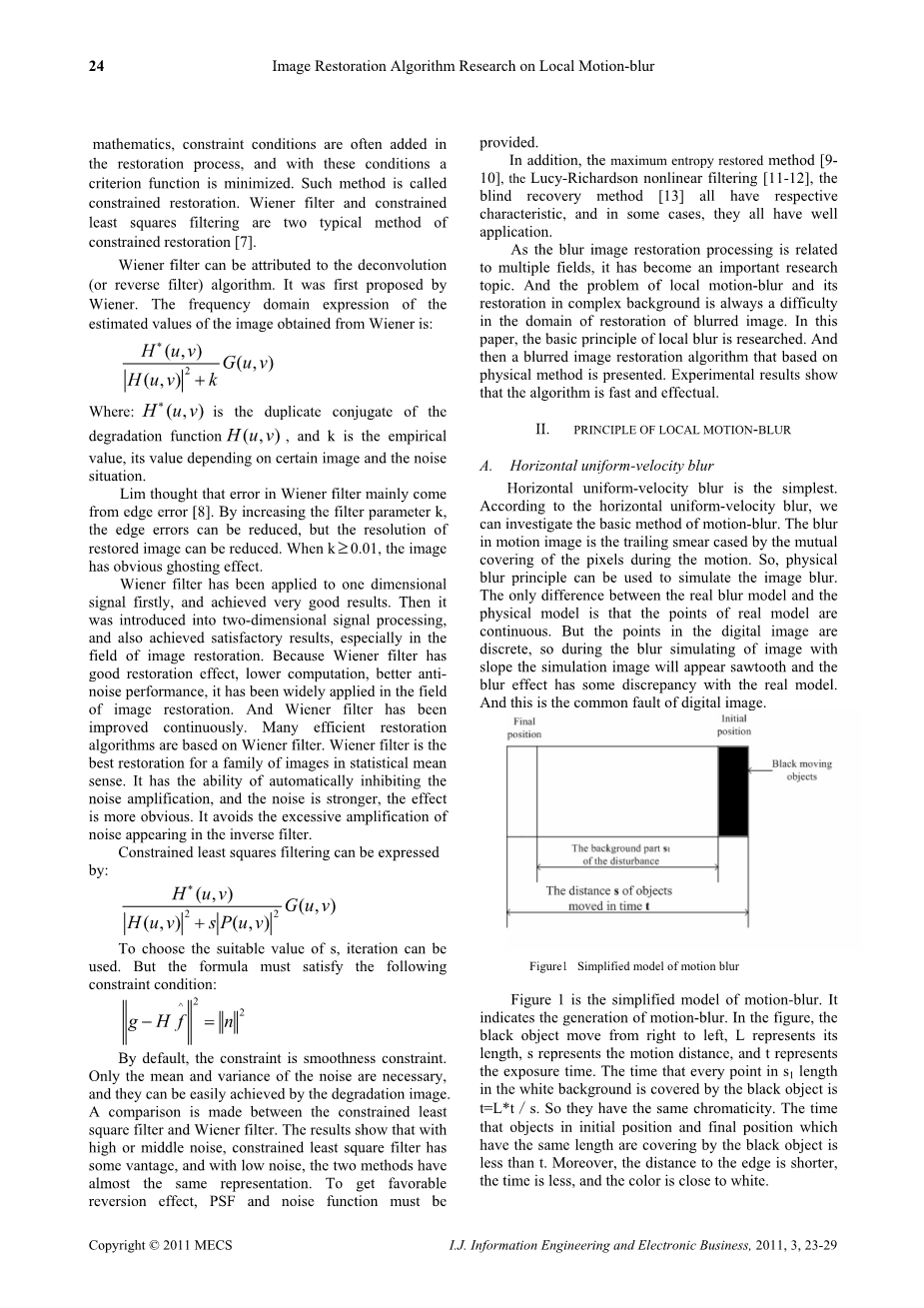
图1运动模糊的简化模型
图1是运动模糊的简化模型。 它表明运动模糊的产生。 在图中,黑色物体从右向左移动,L表示长度,s表示运动距离,t表示曝光时间。 白色背景中s1长度的每个点被黑色物体覆盖的时间ist = L * t / s。 所以他们有相同的色度。 初始位置和最终位置的timethat物体的长度相同,被黑色物体覆盖不超过t。 此外,到边缘的距离较短,时间较短,颜色接近于白色。
图2是原始的清晰图像。 它是两个图像的联合。 图3是功能中添加了一定参数后的模糊图像(例如,水平模糊的步长为30)。
图2 原始清晰图像 图3 模糊图像
2.模糊图像的数学模型
一般来说,造成图像模糊的原因有以下几个方面:(1)在图像采集过程中,相机移动或曝光时间过长; (2)场景不在焦点之外,使用广角镜头,大气引起干扰或短时间曝光会导致进入相机的光子减少; (3)散光变形出现在共焦显微镜下。改进或倒退的图像可以通过以下等式近似:
(1)
其中:g是图像,H是变形算子,它也被称为点扩散函数(PSF),f是原始的真实图像,n是附加噪声,它是在图像的采集过程中产生的,并且会改变 图片。
在上述数学模型中,PSF是一个重要因素; 其值将直接影响恢复图像的质量。 所以它是图像恢复的关键组成部分。 一般来说,图像形成系统中的对象与图像之间的映射关系可以通过以下公式进行整合:[1]
(2)
其中,是输出倒退图像,是输入图像,是成像系统运算符。
为了方便地描述成像系统,成像系统通常被视为线性系统。 实际上,成像系统中总是存在非线性。 如果非线性失真不会引起过大的误差,或者局部地满足线性特征,则即使成像系统完全是非线性的,成像系统通常将被线性系统近似描述。 因此,在实际讨论中,对非线性系统进行了一些线性假设:
(1)运算符是线性的,也就是说它满足线性特征:
(3)
- 运算符是移位不变的,如果输入和输出之间的关系满足(1),,那么对于任何和,则有:
(4)
方程(4)表明,对于图像上的任何一点,计算结果仅与点的灰度值相关,与点的位置无关。
一幅连续图像,可以由二维样本函数的二维卷积表示:
(5)
将放在上。
(6)
令,所以
(7)
在函数中,是点扩散函数(PSF)或系统脉冲响应。 它表示离散图像的每个像素都由操作扩散。影响的影响在大多数情况下,系统是恒定的,它被表示为恒定位移,因此可以由表示。
(8)
随着噪声的增加,图像倒退模型可以表示为:
(9)
其中:是指噪声,这是一个线性移位不变系统模型,移位不变量通常指图像邻域中的空间不变性,图像中的倒退可以通过移位不变模型。
(3)图像的局部运动模糊算法
对于局部运动模糊是通过整个图像中的某些对象的移动创建的,它是相对复杂的。 为了模拟局部运动模糊的形成,本文采用以下实现方法:图像A是具有复杂背景的图像; 图像B用于模拟图像A中的局部模糊部分。图像B被模糊,然后被粘贴到图像A上。背景图像是潜艇图像(图4)。图像需要模糊是海星图像(图5)
图4 背景图片 图5清晰的小海星形象
我们可以建立模糊计算模型:
,A代表背景图像
,B代表模糊的图像
假设:(1)模糊步长k = 3(像素); (2)从图像B的左边缘粘贴到图像A的左边缘开始; (3)最后一个目标图像是C,C是矩阵:
模糊操作的过程如下:
(10)
在模糊过程中,受到背景和模糊图像噪声的干扰。 2/3的干扰来自背景,1/3来自模糊的图像。 该列上其他点的模糊处理与点相同。
(11)
对于点,干扰的1/3来自背景,1/3来自点,1/3来自点。
(12)
的值是已知的,矩阵A和B是未知的。 在自然图像中,一个像素与其相邻像素之间存在强相关性,并且如果像素之间存在一定的距离,则相关性将急剧下降。 所以我们可以用代替,根据(10)可以计算点。 点可以根据(11)计算,那么可以由代替,和之间的相关性将在一定程度上下降。 可以看出,随着模糊步长和矩阵尺寸的增加,计算结果将会变差。
基于上述讨论,设计了一种模糊算法。在算法中,模糊长度k = 60(像素),模糊图像将被放置在背景的中心。因为原始图像中小海星的黑色边缘不是完全黑色的,有些点不是完全黑色的,所以噪音必须被过滤,所以我们可以得到令人满意的结果。 在算法中设置了噪声去除参数,通过它可以获得更好的图像。
首先,通过上述方法叠加两张图像。 通过改变步长k,可以得到不同的模糊结果。 但是出现了一个问题:出现一个大的黑色区域,如下图所示:
图6模糊后的叠加图像
主要原因是在粘贴过程中将黑色背景添加到图像中。 为了改善情况,必须改进图像粘贴方法。 考虑到嘈杂点的出现,噪声降低因子设定为9.糊化效果明显提高。 效果图如下(图7)。
图7去噪后的叠加图像
在改进粘贴方法之后,可以通过上述方法实现更好的模糊图像。 效果图如下(图8):
图8.局部运动模糊过程之后的图
III. 局部运动的恢复算法
模糊拉伸图像和压缩模糊图像之间的恢复模型的差异在于压缩模糊图像的列在模糊后变小。 也就是说,图像的数据量变少,数据被压缩,难以将图像恢复到原始状态。 对于模糊的拉伸图像,在模糊处理后,只需考虑模糊的小图像,它变大。 其数据量也变大。 因为在模糊处理期间模糊的拉伸图像的背景颜色也被曝光,所以模糊图像的数据量受到背景颜色的干扰。 与压缩模糊图像相比,模糊的拉伸图像具有新的干扰源。
如上所述,随着模糊步长和矩阵的尺寸的增加,计算结果将变得更糟。 对于这样的模糊图像,由于背景颜色未知,因此难以恢复图像。 恢复局部运动模糊部分的图像是一个非常复杂的过程。 为了更好地恢复图像,主要思路如下:首先,将模糊部分从复杂背景中提取出来并粘贴在单色背景的底部。 然后在单色背景中的模糊图像上进行恢复过程,这是易于恢复的。 最后,恢复的部分被粘贴回原来的复杂背景。
恢复算法包括以下内容:
- 从原始图像中提取模糊图像的边缘;
- 将模糊图像粘贴到黑色的底部;
- 去除模糊图像中的背景颜色干扰;
- 使用图像模糊的物理原理恢复黑底的模糊图像;
- 将恢复的图像粘贴到原始背景上;
- 恢复原始背景的背景颜色干扰。
在单色背景中,背景可以被认为是不存在的,因此模糊的图像更容易被恢复。 在这种情况下,背景矩阵是零矩阵。
A代表清晰的背景图像。
B表示模糊图像。
假设:(1)模糊步长k = 4(像素)
(2)将模糊图像B的边缘列粘贴到边缘列作为开始。
(3)最后一个目标图片是C
可以通过该循环多次计算所需的矩阵B. 下图是黑底的恢复图像
图9.恢复小海星的形象
从图9可以看出,恢复效果好。 局部运动模糊图像通常具有复杂的背景,因此本文提出的方法简单,有效,快速。 在上述模糊拉伸图像的反演恢复过程中,预先配置了以下四个参数:
- 模糊图像的移动方向
2.模糊图像的移动步长
3.将模糊图像插入背景中的位置
4.去除背景颜色值参与模糊图像的曝光<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[612899],资料为PDF文档或Word文档,PDF文档可免费转换为Word



