基于功能性电刺激的膝关节控制技术研究毕业论文
2020-04-11 17:51:32
摘 要
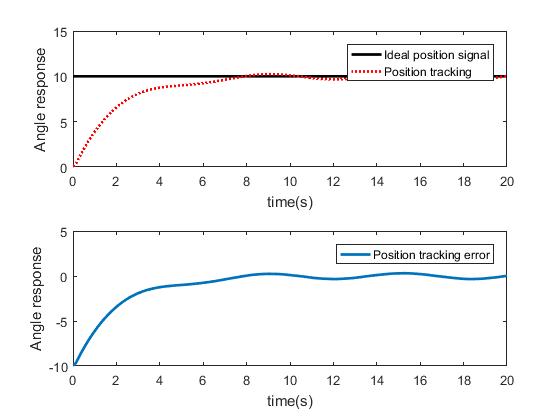
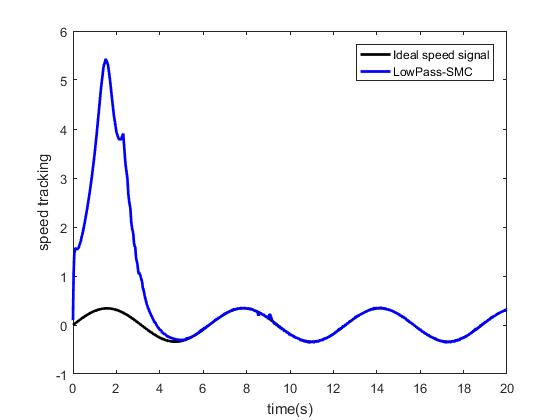
为研究在功能性电刺激(Functional electrical stimulation ,FES)下外部干扰对人体的关节运动会产生怎样的影响,并确定最适合的控制方法来实现更精确的关节运动,本文首先建立了电刺激下的膝关节运动模型,在此模型的基础上设计了三种滑模控制律,利用所建立的膝关节运动模型,通过仿真和实验研究验证了神经网络滑模控制方法相对于常规的滑模控制及低通滤波滑模控制来说,不仅可以准确地控制电刺激而获得期望的关节运动,而且当关节运动受到外部干扰的影响时,还可自适应地对此进行补偿,效地调节电刺激强度以获得准确的关节运动。
关键词:功能性电刺激、滑模控制、低通滤波、神经网络
Abstract
In order to study the effect of external interference on joint movement of human body under functional electrical stimulation (Functional electrical stimulation, FES), and to determine the most suitable control method to achieve more accurate joint motion, this paper first established the motion model of the knee joint under electrical stimulation, based on this model. Three kinds of sliding mode control laws are proposed. By using the established motion model of the knee joint, the simulation and experimental study shows that the neural network sliding mode control method can not only control the electrical stimulation but also obtain the desired joint motion compared with the conventional sliding mode control and the low pass filtering sliding mode control, and the joint motion is affected by the joint motion. The effect of external interference can also be compensated adaptively, effectively adjusting the intensity of electrical stimulation to obtain accurate joint movement.
Keywords:Functional electrical stimulation, sliding mode control, low-pass filtering, neural network
目录
第1章 绪论 1
1.1 研究目的及其意义 1
1.2 国内外研究现状 2
1.3 功能性电刺激技术 3
1.3.1 功能性电刺激技术 3
1.3.2 功能性电刺激的原理 4
1.4 本课题的主要研究内容 4
第2章 滑模控制基本原理与膝关节运动模型 6
2.1 滑模变结构控制基本原理 6
2.1.1 滑模变结构控制简介 6
2.1.2 滑模变结构控制基本原理 7
2.1.3 滑模变结构控制的抖振问题 8
2.2电刺激下的膝关节运动模型的建立 11
第3章 滑模控制器的设计与仿真验证 13
3.1 滑模控制器的设计 13
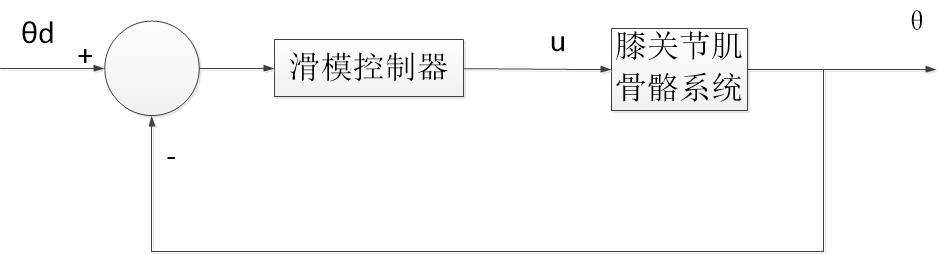
3.1.1 滑模控制器设计 13
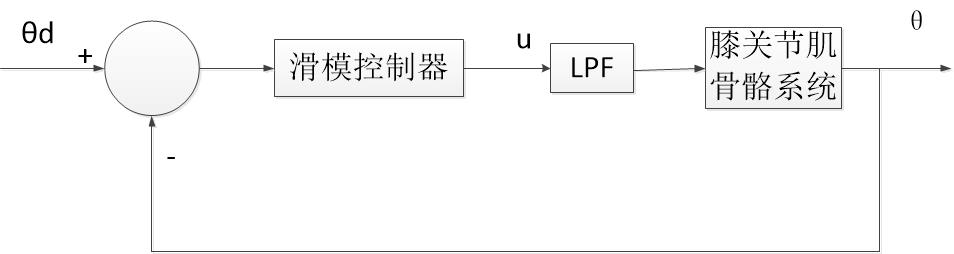
3.1.2 低通滤波滑模控制器设计 14
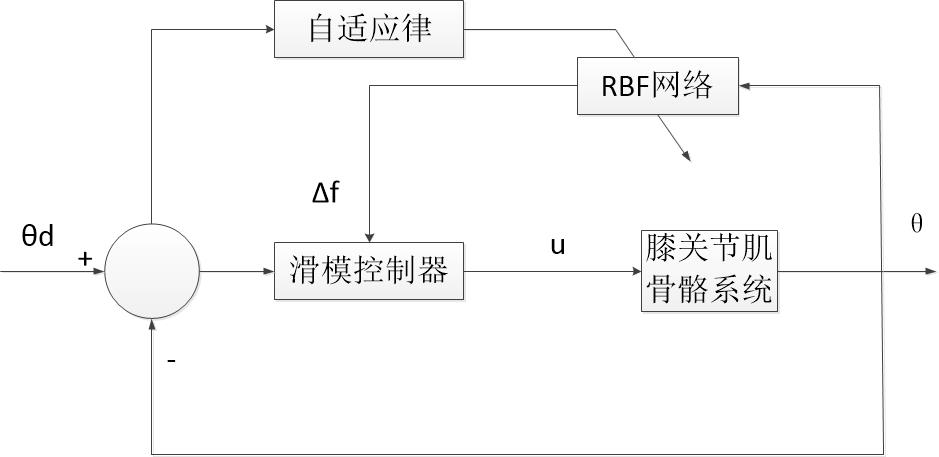
3.1.3 神经网络滑模控制器设计 14
3.2 滑模控制器的仿真验证及结果分析 16
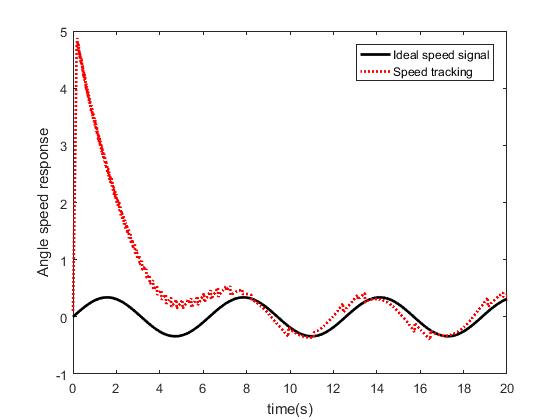
3.2.1 无干扰仿真验证分析 16
3.2.2 有干扰仿真验证分析 18
第4章 总结和展望 20
4.1 论文工作总结 20
4.2 研究工作展望 20
参考文献 22
致谢 23
第1章 绪论
1.1 研究目的及其意义
脊髓损伤(Spinal Cord Injury, SCI),是脊柱损伤并发症的最严重的一种,患者通常情况下表现为损伤节段以下的肢体功能丧失或者是具有严重的功能障碍,脊髓损伤一方面会摧残患者本身的身心健康,另一方面还会给患者家庭乃至整个社会带来巨大的经济压力。截瘫,属于瘫痪的一种,其症状表现为在脊髓受损急性期间,受损节段平面以下的肢体丧失反射能力、运动功能和感觉等等,此外,人体的膀胱、肛门括约肌功能也都会同时消失,称为脊髓休克,而造成截瘫的常见原因主要是以下几个方面:脊髓肿瘤,脊髓空洞证,脊柱压缩性骨折,脊髓损伤,横断性脊髓炎等等[1]。由于如今已经步入人口老龄化时代,生理机能衰退的人数越来越多,并且随着社会发展,交通运输工具的数量呈指数上涨趋势,这也导致了交通事故的频繁发生,使得因此的肢体运动型障碍患者的数量迅速飙升,而在这些人当中膝关节运动障碍患者占最大比重。目前,仅仅美国就已经大约存在268,000名脊髓损伤患者[2],而在全世界范围内,这个数量更是达到了惊人的3,000,000例,除了交通事故和人体机能衰退导致脊髓损伤,由脑溢血、脑血栓等脑中风疾病引起的并发症使患者丧失运动功能的也不在少数,其中,绝大部分的患者身体活动不便,难以自理,生活质量下降,给自己和他人带来沉重的负担。于是,康复治疗势在必行,其中功能性电刺激等治疗方式最有望使患者回到正常生活中。当下,对于肢体运动功能受损的患者主流方式是利用康复机器人辅助治疗,然而肢体运动仍然受限于康复机器人,运动条件十分受限,难以完成复杂的动作。如何脱离康复机器人的限制、实现肢体运动功能重建,具有广阔的研究前景。而功能性电刺激疗法,仅仅只需携带体积微小的功能性电刺激仪就可以辅助康复训练,这相较于康复机器人辅助运动有着明显的优势。
功能性电刺激(Functional Electrical Stimulation, FES)技术是利用一定强度的低频脉冲电流,通过预先设定的程序来刺激一组或多组肌肉,诱发肌肉运动或模拟正常的自主运动,以达到改善或恢复被刺激肌肉或肌群功能的目的[3]。1961年,首次通过功能性电刺激技术成功地矫正了由中风引起的足下垂并发症,在1977年,在众多医学家的努力下,又成功解决了由炎症性脱髓鞘导致的多发性硬化的问题,目前,功能性电刺激疗法已经成为很多领域中的辅助康复的主要治疗方法,特别是在脊髓损伤恢复方面表现出极佳的效果,利用功能性电刺激疗法,一方面能够瘫痪患者实现行走功能;另一方面对于脊髓损伤患者,通过电刺激肢体行走对其进行康复训练,最终达到恢复独立行走的目的。因此,功能性电刺激对辅助人体肢体恢复与重建有着深远的研究意义。
1.2 国内外研究现状
1960年,Kantrowitz为使完全脊髓损伤患者站立起来,采用连续的表面FES来刺激其四头肌、臀肌等多块肌肉并成功达到目的;1961年,Liberson首次通过功能性电刺激技术成功地矫正了由中风引起的足下垂并发症,开创了功能性电疗法的先河,并将其作为辅助运动和感觉功能恢复的新途径,第二年,该方法被Moe和Post正式命名为FES;1967年Gracanin等人给FES一个明确的定义:通过电信号刺激丧失神经控制的肌肉组织,使目标肌肉收缩发力并产生已经丧失的运动功能;1976年到1977年间,先是加利福利亚的波莫纳开展了以“神经假体与功能性电刺激”为题的研讨会,而后在这次会议的基础上,发表了《功能性电刺激:神经假体的应用》一书,该书主针对上肢瘫痪,主要谈到了功能性电刺激在这类疾病中的临床应用情况,随后,科学家菜开始把焦点放到对FES的研究上,美国、日本、加拿大及很多欧洲国家都展开了大量深入的FES研究。
当下,为发展功能性电刺激系统,世界范围内很多科研单位都投入了大量的人力物力和财力。美国的克利夫兰FES中心已经确切表明接下来的研究将重点围绕EEG控制的运动神经恢复展开,欧盟的相关科技部门也倡议多学科团队集中攻克EEG控制的功能性电刺激系统。国内目前主要有清华大学对功能性神经肌肉电刺激展开了初步的研究,此外,浙江大学和中科院生医工研究所也有过类似的研究,天津大学生物医学工程系对功能性电刺激的下肢神经假体系统的研究设计同样功不可没,国内外对FES技术的研究热潮就此开始,但是目前仍停留在实验室应用阶段。
随着科学技术的不断发展,滑模变结构控制的领域的现阶段的研究问题主要有以下几个方面:滑模控制系统抖振的消除、滑模面的设计、滑动控制与其他控制理论方法的结合、向更广的控制系统渗透,尽管提出看各种滑膜控制方法,但抖振问题扔是滑膜控制待解决的问题最近,一种高阶滑模控制方法出现在大家视野中,该方法由ALevant团队提出,采用微分估计和螺旋切换算法研发出了任意高阶滑模控制器,该控制方法不但在去除系统抖振方面表现出极佳的效果,而且相较于传统的控制方法有更强更高的鲁棒性和控制精度,尤其是在面对非线性不确定系统和黑箱系统时,只要设计出合理的控制律,就能够有效地抑制系统的抖振信号,同时还能使系统有限时间收敛,然而这种控制方法的算法太过繁杂,有很大的局限性,虽然高阶滑模控制仍处于萌芽阶段,但是这种控制方法具有很广阔的应用前景,目前已经开始应用在高度不确定的非线性系统当中并表现出很好的控制效果,在不影响滑模控制器其他方面有点的前提下,只要对控制器进行合理的设计,就可以完全消除系统中出现的抖振现象。
然而,由于人体的肌肉骨骼系统是具有高度非线性和随时间推移时刻发生变化的特性,除此之外,不可忽略的影响因素还有肌肉疲劳、痉挛以及个体差异性等,这些都是导致FES控制器在多次重复后运动控制的准确度降低的重要原因,严重甚至无法完成预期运动,康复效果大打折扣,因此,以目前的技术,试图将FES辅助康复系统投入商用是非常难以实现的[4]。
干扰肌肉骨骼肌系统的因素大部分来源是震颤、痉挛、外界环境的扰动对运动肢体的影响以及活动肌肉外肌肉兴奋的时刻。其中,肌肉疲劳会引发肌肉收缩,从而产生肌肉力量[5]。与神经冲动相反,外部电刺激更容易引起疲劳,因为肌肉纤维招募的相反原因。因此,为了降低重复运动的控制误差,肌肉系统的内外干扰和肌肉疲劳成为了FES控制系统设计的两大突出障碍[6]。国内外的很多知名学者进行了大量的实验研究,并获得了重大的成果。为了分析验证肌肉疲劳和外界扰动对FES控制系统的影响,利用仿真平台分别观察分析了PID(Proportion integration differentiation)控制、增益调度控制和滑模控制在不同程度的痉挛和肌肉疲劳下的控制效果。分析实验结果得到以下结论,在高强度和疲劳的情况下,PID和滑模控制是有效的。这个系统甚至不能完成预期的运动。邱等等,采用遗传算法和神经网络达到了PID控制器参数的在线调整的目的,并用其控制膝关节的屈伸的健康受试者[7],具有快速响应和跟踪精度高的优势,但是抵抗干扰的能力和疲劳控制系统在实验中并未得到验证。
基于滑模控制不连续的特性,该方法在面对非线性系统时表现出优秀的控制效果,此外还能很好地处理建模带来的不确定性和外界干扰,这是SMC被广泛应用在FES控制系统中的主要原因。其工作原理是分析判断系统当前状态来切换控制律,强制系统状态移动到预期的滑动模态。在系统进入该模态后,受控对象的参数变化和外部干扰将不会影响系统状态,然而实际系统存在控制延迟和运动惯性,系统状态将越过预设的滑模面,引发抖振同时使滑模控制的性能降低。[8]。在设计控制器时,我们通常使用边界层法来削减甚至消除抖振,也就是说,在边界层内外我们分别采用不同的控制方式,内部使用滑模控制,而将线性化反馈控制技术应用在外部。然而,由于系统不可能完全屏蔽干扰以及系统的建模参数可能不够准确,这就导致系统处于稳态时出现较大的偏差,而且不能确保系统状态收敛于滑模面[9]。
1.3 功能性电刺激技术
1.3.1 功能性电刺激技术
功能性电刺激技术(Functional electrical stimulation, FES)是利用某种特定的电流(电压)信号刺激易兴奋的肌肉、组织或器官,以改善、恢复或重建由神经损伤而丧失的活动功能的技术,结合在截瘫行走领域的应用,其具体可定义为使用某种特定的电流(电压)信号刺激由于脊髓损伤等而失去神经控制的肌肉,并使其收缩,以替代或矫正肢体的运动形态,实现其原有的活动功能。FES主要用于辅助由于中风和脊髓损伤等神经损伤而丧失肢体运动功能的患者康复,最终重建患者的运动能力。FES不仅有助于促进血液循环[10],还能够预防肌肉消除萎缩,促进肌肉再学习,这是FES独特的优势,具有非常宝贵的研究价值。
1.3.2 功能性电刺激的原理
如图1.1所示,患者由于脊髓神经受损,由大脑发出的控制肢体运动的指令无法传递至目标肢体神经,因此失去控制肢体运动的能力,这也就是肢体运动功能丧失的原因,但是同时我们也发现患者肢体的下单元神经元、肌肉等功能性仍然完好,因此只需要通过适当的电流刺激目标肌肉组织系统,诱发肌肉收缩,从而产生运动功能[11]。
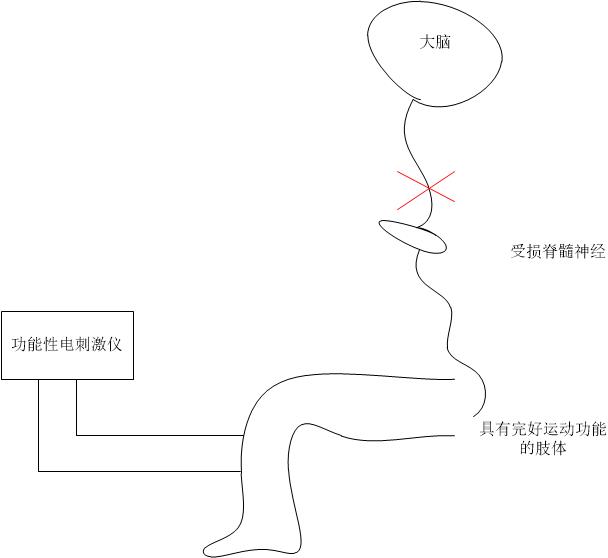
图 1. 1
1.4 本课题的主要研究内容
本文主要是根据功能性电刺激有关的基础知识,以及其在医学辅助康复中运用的实际情况,针对功能性电刺激应用中的两个方面的问题——刺激效果和干扰下的刺激效果,分别设计了滑模控制器、低通滤波器下的滑模控制器和神经网络下的滑模控制器,比较不同控制器的控制效果以及抗干扰效果。第1章绪论部分首先介绍了本课题的研究目的及其意义,随后阐述了国内外的研究现状,最后简单说明了功能性电刺激技术以及该技术的原理。第2章第一部分首先对滑模变结构控制进行了简单的介绍,接着详细讲解了滑模变结构控制的基本原理,最后提出了滑模变结构控制的最主要问题——抖振问题,并说明了抖振问题的产生原因和一些能够降低抖振影响的方法;第二部分则是在电刺激下人体膝关节运动模型的建立。第3章设计了几种不同的滑模控制器并对其控制效果和抗干扰效果进行了仿真验证和分析。最后一章则是对本课题的总结并提出了本课题未来的研究方向。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: