高级辅助驾驶车道线检测的研究毕业论文
2020-04-13 11:07:18
摘 要
随着人们生活水平的日益提高,关于汽车驾驶的安全保障问题得到人们的重视日益增强,无人驾驶车辆的研究的竞争也越来越激烈,所以高级辅助驾驶之一的车道线检测的研究就凸显的越来越重要。
本文先通过大量车道线的检测的相关论文的检索,总结得出车道线大多是机器视觉与数字图像处理结合进行检测的,我们将它的检测过程分为5个模块,图像预处理、特征提取、模型拟合、实时性、图像坐标与世界坐标的通信。
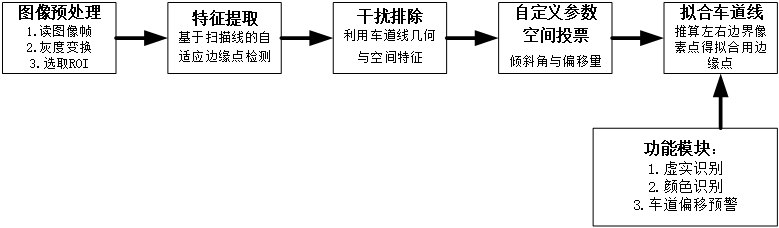
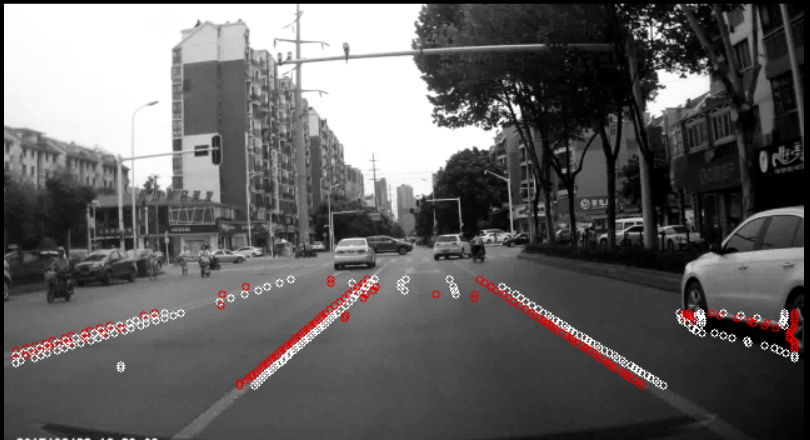
同时,本文也研究一个具体的车道线的检测算法,并将其基于pc机重现成功。以图象帧为单位读取图像,进行灰度变换,选择算法的感兴趣区域;对图像的R通道采用基于扫描线的自适应边缘检测算子提取图像特征点;利用车道线的几何特征和空间连续性进行非车道线的干扰排除;在自定义的参数空间对边缘点进行投票,得到车道倾斜角与偏移量。最后拟合处车道线。
最后对结果进行分析得到车道线的检测可以得到具体的实现,并对采用的车道线检测方法提出一定的改进方向,同时展望自己对车道线的检测接下来的研究方向
关键词:数字图像处理;车道线检测;特征提取;参数空间
Abstract
With the improvement of people’s living standards, people’s attention has been paid to the issue of safety and security of car driving. The competition for research on driverless vehicles is also becoming more and more intense. Therefore, the research on lane detection of advanced driver assistance is Prominent and more important.
This article first through the retrieval of a large number of lane line detection related papers, concluded that the lane line is mostly detected by combining machine vision and digital image processing, we divide its detection process into five modules, image preprocessing, feature extraction , model fitting, real-time, image coordinates and world coordinates of communication.
At the same time, this paper also studies a specific lane line detection algorithm, and based on the PC to reproduce successfully. Read images in units of image frames, perform gradation transformation, and select the region of interest for the algorithm; use the adaptive edge detection operator based on scan lines to extract image feature points for the R-channel of the image; use the geometric features of lane lines and Space continuity is used to eliminate interference from non-lane lanes; voting is performed on edge points in a custom parameter space to obtain lane tilt and offset. Finally fit the lane line.
Finally, the analysis of the results to obtain the detection of the lane line can be achieved, and the direction of improvement of the adopted lane line detection method is proposed. At the same time, the future research direction of the detection of the lane line is also expected.
Key Words:digital image processing;lane detection;feature extraction;parameter spa
目 录
第1章 绪论 1
1.1课题研究背景及意义 1
1.2 与课题相关的国内外研究现状 1
1.3 研究内容及论文结构 3
第2章 车道线检测理论分析 5
2.1车道线检测系统分析 5
2.2 车道线检测的环境多样性 6
2.3 车道线检测图像预处理 7
2.3.1 图像预处理概述 7
2.3.2 感兴趣区域的获取 7
2.3.3 图像的灰度化 8
2.4 特征提取 10
2.5 车道跟踪 10
2.6 车道偏离警告 11
第3章 车道线检测方案的实现 13
3.1 方案流程 13
3.2 车道线获取的具体实现 13
3.2.1图像帧的灰度变换 13
3.2.2 ROI的选取 14
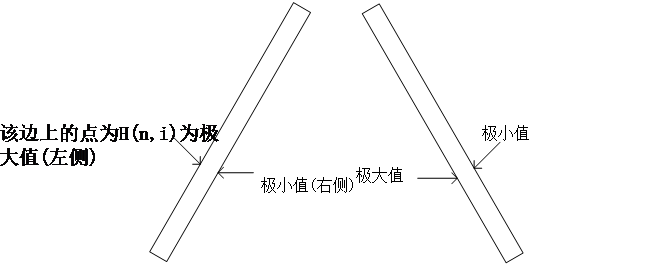
3.2.3边缘点的提取 15
3.2.4干扰点排除 16
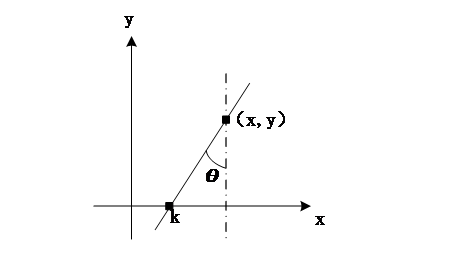
3.2.5自定义参数空间投票与拟合车道线 17
3.3功能模块的实现 18
第4章 PC机上的系统测试 20
4.1 测试环境 20
4.2 测试结果分析 20
4.2.1 测试结果 20
4.2.2 结果分析 22
第5章 总结与展望 24
5.1总结 24
5.2展望 24
致 谢 26
参考文献 27
第1章 绪论
1.1课题研究背景及意义
根据美、英等发达国家的道路交通事故的详细分析可知:车祸发生频繁的主要是车辆在驾驶员无意识偏离本车道,从而导致车辆间发生碰撞。根据国家安全监管总局和交通运输部2017年12月19日联合发布的2017年道路交通运输安全发展报告显示[1],就目前为止,中国道路交通事故年死亡人数仍然高居世界第二位,每年交通运输事故总量仍居高位,事故起数、死亡起数分别占全国重特大事故总量的70%和80%。根据公安交通管理部门注册登记的机动车显示,截止2017年,全国汽车保有量达2.17亿辆。在我国当今发生的各种交通事故中,由驾驶人员无意识使车辆偏离车道从而引发的交通事故占其50%左右。无意识的车道偏离是危害人民生命的首要原因。为了使车辆在道路上安全的行驶,杜绝道路上行驶车辆与行驶车辆间发生碰撞甚至更严重的交通事故,于是针对车辆的高级驾驶辅助系统(ADAS)之一的车道线检测重要性就凸显出来了。同时,如果车辆能个较为严格的按照道路上的车道线所划分的车道行驶,并且有一定的车道偏离预警,那么交通事故就可大量减少甚至杜绝。这带来的不仅仅时人们生命安全,更提高公路的交通性能,从而带来巨大的经济效益。所以,关于车道线检测的研究意义重大。
车道线是一种常见的交通指示标,它规定了车辆的基本的行驶范围。不管是在传统的辅助驾驶人员还是当前的热门研究无人车中,车道线检测都发挥着重要作用。传统的辅助驾驶人员通过车道线检测,是为了对驾驶员进行预警当车辆偏离车道线的规定范围时,解决了车辆与车辆间发生碰撞发的可能。而在无人车研究中,车道线检测提供了最重要的基本信息,是自动巡航驾驶、车道保持、车辆超车等操作一个必不可少的前提。最终实现车辆的安全的行驶,其具有深远研究意义和不言而喻的重要性,。
高级驾驶辅助系统中的车道线检测以及基于其上的车道偏,离警告是连续检测车辆所行驶的车道的车道线,如果车辆距离车道线的距离超过预定的危险位置时,司机就将别通知,并且可以采取动作纠正。使用车道线检测,无意识的车道偏离,驾驶员的注意力不集中,分心,疲劳等可以减少。国内外很多机构都在研究汽车车道线检测及基于其上的车道偏离预警。。
1.2 与课题相关的国内外研究现状
道路上的车道线检测是高级驾驶辅助系统的关键因素。因此,在过去二十年来,它一直是一个活跃的研究领域,并在过去的几年取得了相当大的进展。
基于视觉的成像在车道线检测的任务中起主导作用。这样是因为有两个主要原因:首先,视觉数据无疑是人类驾驶员参与时使用的主要方式。设计了车道标志和道路边界,这样司机就能在所有驾驶条件下看到它们。由于道路和道路标记基础设施最适合人类的视觉系统,所以使用摄像机获得相同的视觉线索对于一个计算相当的系统来说是很有意义的。事实上,一般情况下,由于车道标记只在视觉域上有一个信号,所以在不涉及视觉形态的情况下,就不可能实现车道线探测系统。其次,从“进化”的观点来看,现在的相机显然是汽车应用最便宜和最健壮的方式。消费级批量生产的相机模块的成熟,再加上机器视觉上的大量投资,可以实现高性价比的解决方案
车道线检测目前常采用的是计算机视觉与图像处理结合的方法,是通过检测图像来找出车道线。车道线检测是利用安装在挡风玻璃的上方,作为后视镜安装座的一部分(现与行车记录仪结合,同使用一个摄像头)。它捕捉前方道路的视图。车道线检测系统检是测复杂环境中的视图的车道标志,并利用它们进行车辆位置和轨迹的可靠估计。当然,这种位置和轨迹是车辆相当于车道线标志的。当车辆偏离并接近或到达车道标记时,司机会得到警告。该警告可以是方向盘或驾驶员座椅上的可听音,或视觉警告或振动。如果驾驶员故意越过车道(换道)即开启信号,则不会有警告。为了开发能够使用各种条件的稳健车道检测系统,必须将车道线标志检测器与车道线跟踪系统集成来开发该系统。
无论是用于辅助驾驶车辆,还是用于无人车驾驶中,车道线检测都是使车辆正常安全的行驶的一个重要基础条件。虽然车道线检测已经在上个世纪90年代就已经有人开始研究了,但是就目前为止,依然是一个很难的研究课题,主要是因为现实世界的道路构造非常复杂多变。不同的国家有着不同的交通法规,对于交通中的车道线标志当然就有所不同。在同一个国家中,受到地貌环境以及区域文化的影响,不同的城市之间的车道线标志也可能存在差异。这是车道线检测需要克服的难题之一。另外,车道线自身也是脆弱的,可能因为收到大雨等的冲刷,车辆轮胎的磨损等出现腐蚀、模糊不清的现象,这就造成一些图像算法很难检测出这些受损的车道线。同时,天气也对车道线检测产生一个明显的影响。当出现下雪、暴雨、有雾等天气,摄像机所采集的图像很难分析出车道线的准确位置,有时直观检测车道线根本就无法进行,此时,一些基于其他规则的车道线检测方法就需要被我们所考虑。因此,车道线检测的任务仍然是一个艰难的挑战。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: