基于ROS的工业机器人运动规划系统设计与实现毕业论文
2020-02-17 21:08:32
摘 要
目前我国工业化发展快速,在生产过程中工业机器人能够完成操作简单、劳动力大的工作,减轻人类的劳动。为了能够更好地实现人机合作,我国在智能制造业方面致力于提高机器人的技术。我们需要不断完善机器人系统软件的开发,ROS(an open-source robot operating system,开源机器人操作系统)是一款常用的机器人开发系统,可以实现对软件代码的复用性和模块化,包含大量的库、工具和插件等。同时,合理的轨迹规划也是提高机器人控制技术的重要部分。
本文基于ROS开发设计了一个工业机器人运动规划系统,设计了机器人在无障碍物与有障碍物的避障规划对比研究以及基于碰撞避免的工业机器人抓取任务研究,并在RViz中可视化机器人运动轨迹。首先分析机器人的构造以及运动学正反解,创建机器人模型使其可在ROS上进行仿真,然后通过碰撞检测和RRT(Rapid-exploring Random Tree,快速探索随机树)算法实现工业机器人无碰撞路径规划,通过插值技术对路径进行平滑,确保机器人的平稳运动。
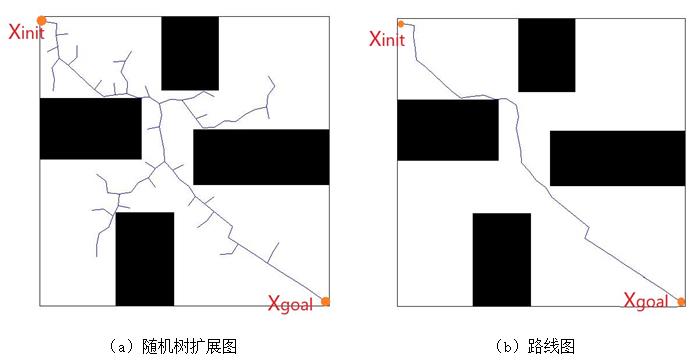
实验结果表明了机器人在基于RRT算法下规划出的路径具有随机性,且在环境中加入障碍物后,调用MoveIt!中的库进行碰撞检测后可规划出一条合理的路径。机器人的取放运动是在无碰撞路径规划的基础上加入夹爪的运动,实验结果显示了机器人在抓取物体后的运动过程中实现了避免自身以及目标物体与障碍物的碰撞。基于本文中两个实验的工业机器人运动原理可以设计出更多的机器人工业操作,因此本研究结果对于实际研发机器人具有重要的指导意义。
关键词:ROS;工业机器人;MoveIt!;碰撞检测;运动规划
Abstract
At present, China's industrialization is developing rapidly. In the process of production, industrial robots can complete simple operation, large labor force and reduce human labor. In order to better realize man-machine cooperation, our country is committed to improving the technology of robots in the intelligent manufacturing industry. We need to constantly improve the development of robot system software. ROS (an open-source robot operating system) is a commonly used robot development system, which can realize the reusability and modularization of software code, including a mass of libraries, tools and plug-ins. At the same time, reasonable trajectory planning is also an important part of improving robot control technology.
In this paper, an industrial robot motion planning system is designed based on ROS. A comparative study of obstacle avoidance planning between obstacle-free and obstacle-free robots is designed, and the grasping task of industrial robots based on collision avoidance is studied. The robot motion trajectory is visualized in RViz. Firstly, the structure of the robot and the forward and backward kinematics solutions are analyzed, and the robot model is created to simulate on ROS. Then, the collision-free path planning of industrial robots is realized by collision detection and RRT (rapid-exploring random tree) algorithm, and the path is smoothed by interpolation technology to ensure the smooth motion of the robot.
The experimental results show that the path planned by the robot based on RRT algorithm is random, and after adding obstacles in the environment, a reasonable path can be planned by calling the library of MoveIt! for collision detection. The grasping motion of the robot is based on the path planning without collision. The experimental results show that the robot avoids collision between itself and the object and the obstacle in the process of grasping the object. Based on the motion principles of industrial robots in the two experiments, more industrial manipulations can be designed. Therefore, the results of this study have important guiding significance for the actual research and development of robots.
Keywords: ROS; Industrial Robots; MoveIt!; Collision Detection; Motion Planning
目录
第1章 绪论 1
1.1 课题研究背景 1
1.2 研究现状和意义 1
1.2.1 国内外研究现状 1
1.2.2研究意义 2
1.3 研究内容及章节安排 2
第2章 工业机器人原理与ROS简介 3
2.1 工业机器人运动学分析 3
2.1.1 正运动学求解 4
2.1.2 逆运动学求解 5
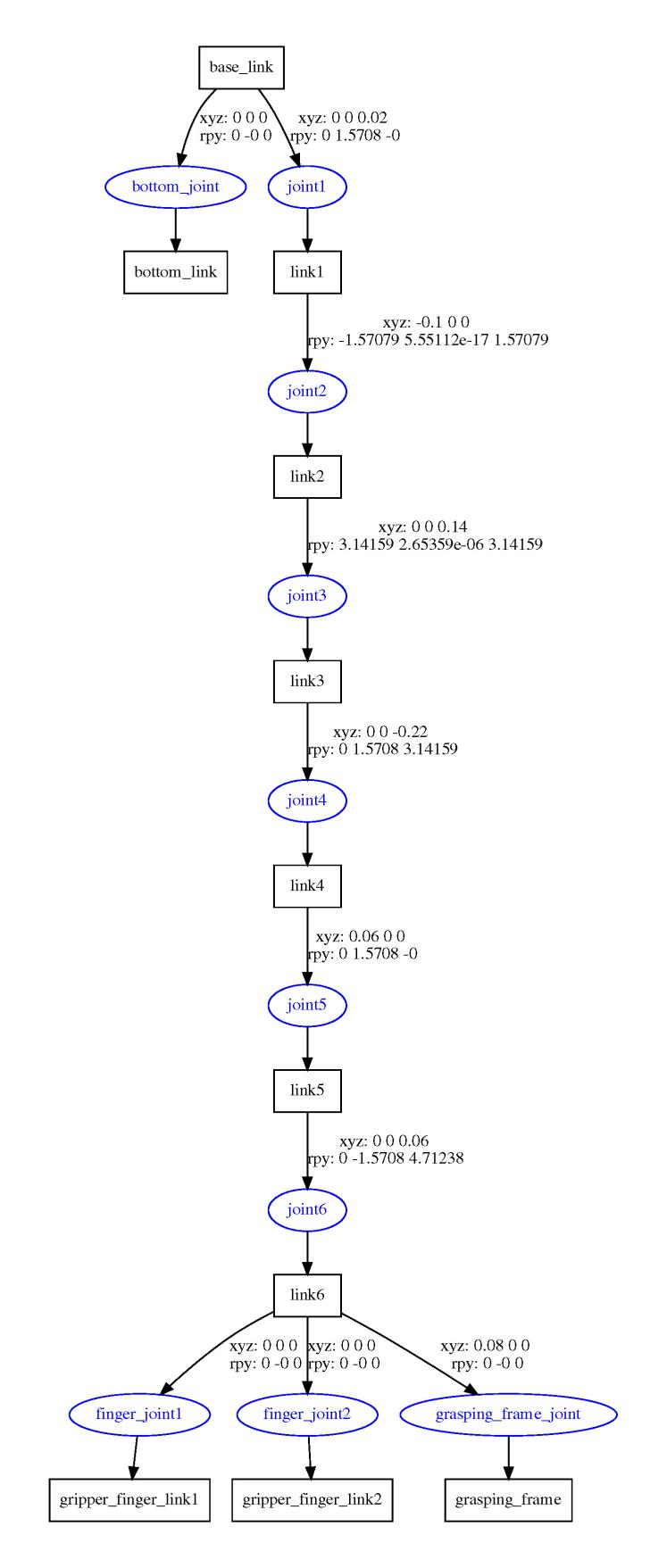
2.2 机器人URDF模型 6
2.3 ROS相关介绍 7
2.3.1 ROS 7
2.3.2 RViz 8
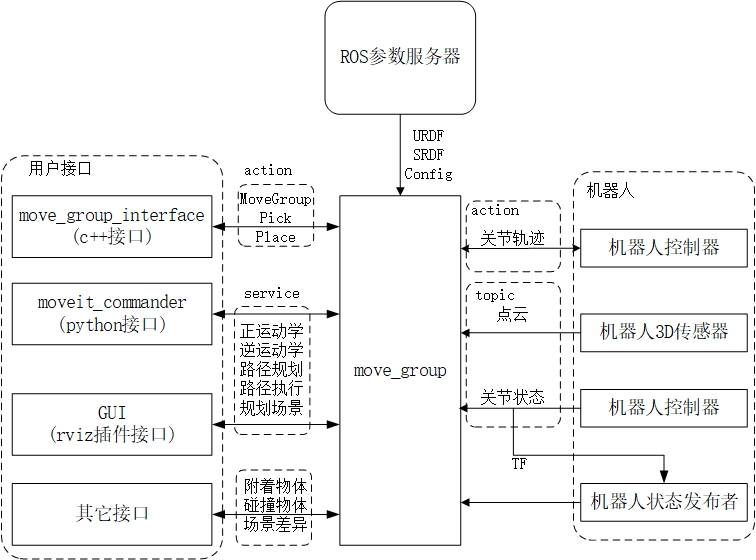
2.3.3 MoveIt! 9
第3章 基于碰撞避免的运动规划原理 12
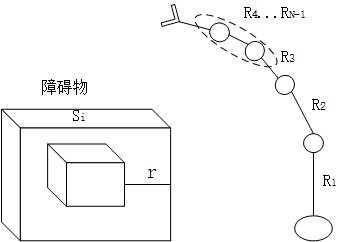
3.1 基于长方体包络的碰撞检测 12
3.2 RRT算法规划路径 13
3.2.1 基本RRT算法 14
3.2.2 算法改进 15
3.3 B样条函数插值 16
第4章 工业机器人运动规划系统实现与仿真 18
4.1 基于碰撞避免的运动规划 18
4.2 基于碰撞避免的抓取运动 20
第5章 总结 22
参考文献 23
致谢 25
第1章 绪论
1.1 课题研究背景
如今,随着人们对于智能化的需求不断提升,机器人在工业、农业、生活、教育、交通、海洋、航天、救灾、军事等方面都获得了大量应用。计算机和互联网成为了现代生活必不可少的部分,与此相关,工业机器人的智能化应用也在逐渐改变着人类的生活和生产方式。工业机器人结合电子、计算机和人工智能等多种学科中的相关技术快速发展,可以完成搬运、导航和焊接等工作,协助人类劳动力,是制造业工厂中重要的自动化装备。工业机器人部分替代中低端劳动力是大势所趋,企业对工业机器人的需求量在不断增加[1]。目前出现的工业4.0新模式对机器人和人类之间的合作有安全性要求,与一般的机器人不同,这类工业机器人可以在没有安全措施的情况下协作作业,人机协作要求人类工作者不受机器人的伤害,同时不违反生产约束,以保证一定的生产率[2]。
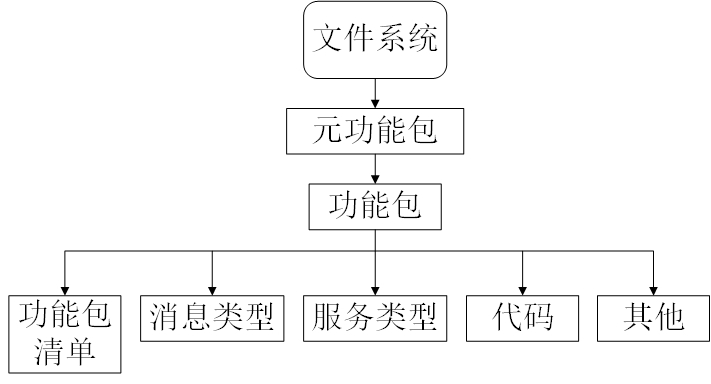
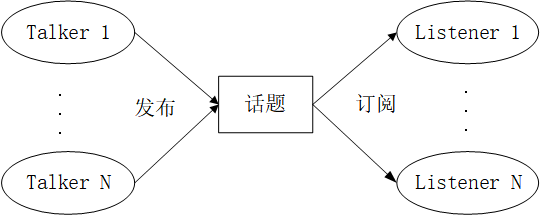
ROS是一个开放源代码的机器人元级操作系统,提供了进程间消息传递和功能包管理,适用于机器人软件的灵活编写。通过创建工作空间和功能包搭建起机器人的运作环境,使用插件和工具等实现路径规划、碰撞检测、抓取任务。同时,ROS中还可以进行机器人仿真控制,成为现代工业机器人研发的重要平台。
1.2 研究现状和意义
1.2.1 国内外研究现状
当前,智能化工业机器人成为国内外很多公司和工厂研制的重点。美国在20世纪50年代末设计出了第一台电子可编程序的工业机器人,第一代机器人由此诞生。晚于美国5年的日本在机器人领域发展非常迅速,其机器人的数量处于世界领先地位[3]。工业机器人的广泛应用不仅体现在制造业方面,还表现出在建筑和采矿等非制造领域中占据重要地位。在这些领域中,路径规划技术一直是学术界研究的热点,即设法使机器人在实际应用环境中避开周围物体运动,对此国内外学者进行了大量的研究并取得了一些卓越成果,规划方法可分为传统方法和智能方法[4]两大类,如A*算法、RRT算法、遗传算法、神经网络算法等。
我国工业机器人的起步较晚,在创新方面相较于国外还有很长一段路。现今,我国愈发重视机器人的智能化发展,经过多年的研究与开发,很多工厂的工业机器人已经能够完成搬运、点焊、装配等工作,我国在机器人避障技术上也取得明显进步,但我国工业机器人市场现在仍然大多依赖进口,核心零件的自主创新还未发展成熟,在制造过程的精确度与效率、产品品牌和产品质量上与国外仍有一定差距,目前工业机器人四大家族abb、库卡、安川、发那科[5]为首的外企品牌占中国机器人行业的大部分市场份额。下一个阶段,我国要加大力度优化工业机器人在动态环境中的运动,提高机器人工作精度与灵活性,保证人机物三者的安全协作。
1.2.2研究意义
现代制造业的快速发展要求工业机器人能应对各种复杂的场景,因此对工业机器人的研究成为目前的重点。机器人辅助智能制造不仅可减轻劳动强度,还可以提高劳动效率。然而,在机器人的实际应用过程中,要考虑周围环境复杂的情况下机器人如何运动这一问题,所以,实现机器人自主搜索一条无碰撞且最优的路径在工业制造中尤其重要。在工作过程中,工业机器人还会碰到障碍物或者运动不平缓等问题,这些都可以通过ROS平台来进行虚拟仿真来分析解决。ROS提供类似操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能执行、进程间消息传递,以及包管理[6]。开发者通过调用强大的库文件来完成机器人的基本运动和感知操作,在成熟的库文件上进行改进从而简化编程过程,提高机器人开发效率。
在机器人的工作过程中,规划一条合适的运动路径以保证完成机器人的正常运动是研究机器人的首要问题。很多热门学科都和机器人的路径规划技术相关,该技术的应用在很多领域也占有重要地位,因此,研究和设计工业机器人的运动规划是有现实意义的。本文研究中的机器人操作简单,运动速度平稳,准确率较高,且对机器人的路径规划做了优化处理,可以给工业生产带来很大便利,具有广泛的研究意义和应用价值。
1.3 研究内容及章节安排
本课题以工业机器人的运动规划为背景,基于ROS搭建工业机器人运动规划平台,通过RRT算法实现工业机器人无碰撞路径规划,通过B样条插值技术对路径进行平滑,最终完成避障和抓取任务。
本次毕业设计论文共分为五章,其具体安排如下:
第一章主要介绍了对工业机器人应用及软件开发的相关背景,并对国内外机器人的发展现状和本设计的研究意义进行简单阐述。
第二章介绍了工业机器人的运动学原理。首先介绍机械臂的组成结构和空间坐标系的表示形式,然后对机械臂的正反运动学分析,最后介绍机器人所要用到的软件平台ROS。
第三章介绍了运动规划的原理。首先介绍基于长方体包络的碰撞检测,然后介绍随机探索生成树算法的原理,并提出优化算法,最后加入插值技术对规划出的路径进行平滑。
第四章介绍了本次设计的实现内容及研究结果。分为两步实验,首先进行基于碰撞避免的路径规划,然后在前一个实验基础上进行夹爪的抓取与放置操作。
第五章是对本次设计的总结。
第2章 工业机器人原理与ROS简介
机器人的整体运动由各个部分的关节和连杆的配合运动组成,想要控制机器人的运动就要了解关节运动和末端执行器运动之间的关系,掌握连杆上的坐标变换。本章通过了解机器人的组成结构从而学习其运动学正反解,进而建立起机器人的模型,并掌握机器人在ROS平台上的运行过程。
2.1 工业机器人运动学分析
机器人由关节和连杆组成,其自由度由连杆、关节数、关节类型及机器人的运动链所决定。组成一个机器人各部分的独立部件称为连杆,连杆上任意两点的距离是恒定不变的。连杆由运动副或关节耦合,每个关节耦合两个连杆,并且为连杆的相对运动提供物理约束。一个六自由度机器人如下图2.1所示。
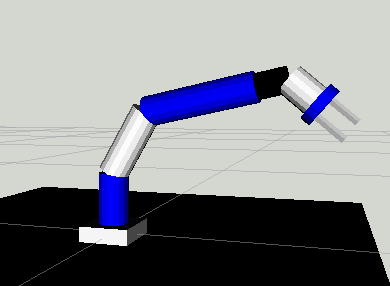
图2.1 六自由度机器人结构
在三维笛卡尔坐标中,处于空间中的一个刚体的自由度为6,刚体运动包括沿x,y,z轴的平移运动和绕这三个轴的旋转运动,表明空间中一个物体的位置可以通过3个平移坐标来描述,方向可以通过3个旋转坐标来描述[7],因此一个刚体的运动要通过6个独立参数来定义。
空间中一个刚体的位置可用刚体上一点相对于固定坐标系 中原点的位置进行表达,如果移动坐标系
中原点的位置进行表达,如果移动坐标系 相对于于固定坐标系的方向设为
相对于于固定坐标系的方向设为 ,那么固定坐标系中的向量
,那么固定坐标系中的向量 就可以表示为
就可以表示为 。因此,在固定坐标系中向量
。因此,在固定坐标系中向量 可以表示为:
可以表示为:
 (2.1)
(2.1)
式(2.1)表示刚体上点 从移动坐标系到固定坐标系的“坐标变换”。这个变换过程包括平移和旋转[8]。
从移动坐标系到固定坐标系的“坐标变换”。这个变换过程包括平移和旋转[8]。
为简化坐标变换过程,引入4×4的矩阵 ,坐标变换可写为:
,坐标变换可写为:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: