基于力反馈的柔性机械手控制策略设计实现毕业论文
2020-02-17 21:46:32
摘 要
随着机器人产业的不断发展,作为与物体实际接触的机械手也得到了越来越多的关注,为了适应各种要求越来越高的工作内容和越来越复杂的工作环境,对机械手的设计也提出了更高的要求。目前,气动柔性机械手在工业机器人和家庭机器人上的应用越来越多,它的应用范围很广,可以代替人手在不同的工作环境下完成规定的动作,在军事、工业、医疗救护和家务劳动上都发挥了很大的作用。气动柔性机械手的内部构造很简单,针对某一项工作的专用性特别强,其中,在用程序控制机械手时,由于程序可变性强,所以在面对变化很快的生产生活中应用性很强,适应的也特别快,在实际的应用中也越来越深入。
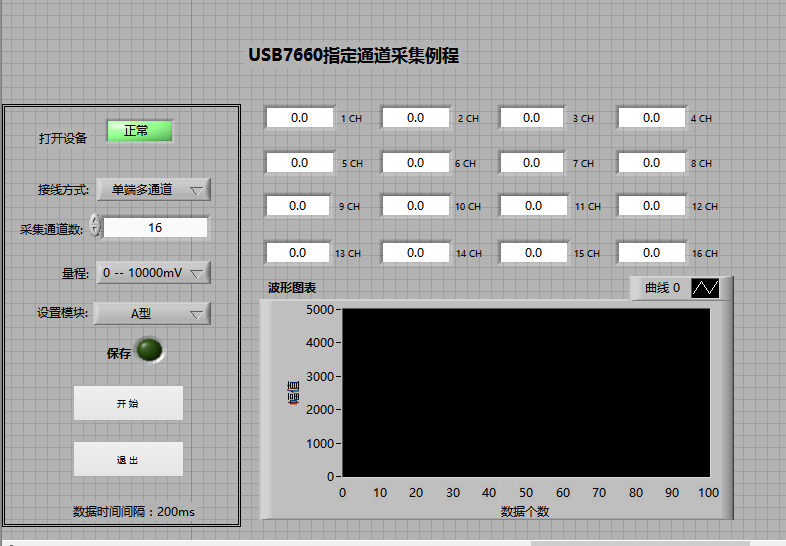
在实际的应用中,面对不同质量和不同材质的物体,机械手上力的大小是抓取动作是否成功的关键因素,所以气动柔性机械手上每个手指的配合使用和力度的大小控制是研究的关键部分。本课题拟通过对气动柔性机械手手指上力的大小进行控制研究,通过引入力反馈,利用压力传感器和压阻转换器传输数据,最后通过数据采集卡来实时采集数据,再利用迭代控制算法控制实时输出手抓的抓取力度,多次迭代从而确定力度的最佳值。算法的仿真是利用Labview和Matlab实现的,并将算法在实际柔性手抓上加以应用,从而验证算法的鲁棒性。
关键词:气动仿人机械手;力反馈;迭代控制算法
Abstract
With the continuous development of the robotic industry, more and more attention has been paid to the manipulator as the actual contact with objects. In order to adapt to the increasingly demanding work content and more complex working environment, higher requirements have been put forward for the design of the manipulator. At present, neumatic flexible manipulator is more and more used in industrial robots and home robots. It has a wide range of applications. It can replace human hands to complete specified actions in different working environments. It plays a great role in military, industrial, medical rescue and housework. The internal structure of pneumatic flexible manipulator is very simple, and it has strong speciality for a certain work. Among them, when using program to control manipulator, because of the strong variability of program, it has strong applicability in the face of rapid changes in production and life, and also adapts very quickly. It is more and more in-depth in practical application.
In practical application, in the face of different quality and different material objects, the size of the force on the manipulator is the key factor for the success of grasping action, so the coordinated use of each finger on the pneumatic flexible manipulator and the size control of the force are the key parts of the research. This subject intends to control the size of the force on the fingers of pneumatic flexible manipulator by introducing force feedback, using pressure sensor and piezoresistive converter to transmit data, finally collecting data in real time through data acquisition card, and then using iterative control algorithm to control the grasping force of the real-time output hand, so as to determine the optimal value of the force through multiple iterations. The simulation of the algorithm is realized by using Labview and Matlab, and the algorithm is applied to the actual flexible hand grasp to verify the robustness of the algorithm.
Keywords: neumatic humanoid manipulator; Force feedback; Iteration control algorithm
目录
第1章 绪论 1
1.1 课题研究的背景和意义 1
1.2 柔性机械手的国内外研究现状 2
1.2.1柔性机械手的国外研究现状 2
1.2.2 柔性机械手的国内研究现状 3
1.3 本论文的主要工作 3
第2章 柔性机械手的相关理论研究 4
2.1柔性机械手的仿生学原理 4
2.2 影响柔性机械手抓取能力的因素 5
2.2.1 柔性机械手抓取原理 5
2.2.2 影响柔性机械手抓取能力的因素 6
2.3 柔性机械手的控制技术研究 6
2.3.1 柔性机械手的控制过程 6
2.3.2 柔性机械手的PLC设计 7
2.4 柔性机械手的抓取动作研究 7
第3章 柔性机械手的软硬件控制 9
3.1柔性机械手的硬件控制 9
3.1.1硬件控制的原理 9
3.1.2 硬件控制的选型 9
3.2 柔性机械手的软件控制 11
3.3 本章小结 12
第4章 自适应迭代学习算法 13
4.1 自适应迭代学习算法原理以及应用 13
4.1.1自适应迭代学习算法原理 13
4.1.2 自适应算法的改进 14
4.2自适应迭代学习算法的仿真和实验结果分析 15
第5章 课题总结与展望 17
5.1课题总结 17
5.2今后工作的展望 17
参考文献 18
附录 19
致谢 21
绪论
1.1 课题研究的背景和意义
全球的机械自动化进程快速发展,机械化程度加快,使得自动化学科和机器人学科的相关研究和发明在现在和未来已经成为最为火热的领域,其中仿人机械手的高度自动化研究在各个高校、自动化工厂以及一些自动化科技公司中紧密展开,但是由于人手经过无数次进化演变,现在结构复杂以及功能较强,要设计出完美满足功能并且结构较为简单的仿人机械手需要克服重重困难。
此时,由于气动结构驱动安全性高同时灵活性强,并且顺从性强而且重量轻,所以在医疗服务领域和工业机器人领域运用极为广泛。经过几十年的研究,机器人和机械手已经从工业慢慢渗入到各种与生活紧密联系的行业,除了医疗业和服务业,在农业和家务劳动上也有了很多的应用。在未来的研究中,旨在让机器人更多地帮助人们完成各种各样的工作,研究出更智能化和全自动化的产物迫在眉睫[1]。
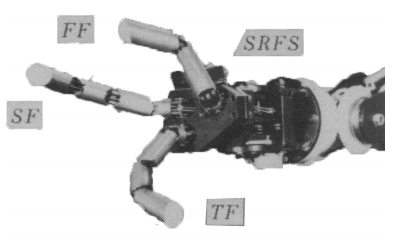
图1.1 Okada仿人机械手
在机器人的整体研究中,由于机械手与人的相似程度最高,在运动过程中,可以实现与环境的交互过程。柔性机械手由于它的重量很轻,易于控制很灵活而且结构相较与其它机器人来说很简单,所以在应用上也很广泛[2]。为了使机械手更加完美地贴合人手的特性,所以在研究中尽可能地贴合人手的特性是重中之重,甚至超过人手在力量和环境上的限制,从而能够让机械手在特定环境中代替人手完成各种复杂的工作和任务[3]。柔性机械手特点是承重能力强,“听话”而且准度很高,但是在医疗和服务领域的要求更高,对柔性机械手的能力和安全性的要求也在提高,特别是顺从性上,要求特别高,在精度上的要求更是直接关乎着机械手的好坏。机械手也加上了人工肌肉的应用,人工肌肉是一种气动的执行器,人工肌肉是“机构之父”Reuleaux在一次实验中用橡胶代替肌肉发明的,以此来模拟人的肌肉的特性,由此打开了气动肌肉研究的大门,经过各种研究改进,现在由美国Joseph L.Mckibben发明了人工肌肉叫Mckibben肌肉[4]。最初应用在医学领域,现在很多领域都有了很多的应用,比如医疗行业和食品行业,从此开辟了更广阔的空间。
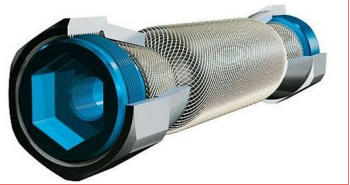
图1.2 气动人工肌肉结构图
1.2 柔性机械手的国内外研究现状
随着机器人行业的迅猛发展,全球机器人方面的专家对机器人和机械手的研究越来越多,对机械手的研究也越来越深,现在已经研究出很多的功能很不同的柔性机械手,针对不同环境下的应用也很广泛。柔性机械手是一种末端执行器,它是否能发挥出跟人手一样的功能,决定着整个机器人的好坏,所以它的设计跟人手的功能和外观相近的程度是设计的关键[5]。其中驱动系统的设计是亟需解决的关键问题,驱动系统是用来产生驱动手指运动的力,但是用来产生力的气缸一般情况下尺寸较大,不能集成在手指的关节部位,所以气缸等驱动源一般都置于手掌或者手臂部位,因此就需要传输系统来完成力的传输,机械手的体积大部分是由传输系统的大小决定的,所以要设计出跟人手一样的机械手取决于传输系统的设计[3]。
1.2.1柔性机械手的国外研究现状
机械手在国外的发展很早也很快,相较于国内发展得也更好。由意大利在前不久研究出的机械手,称为DIST手,整体的自由度很高,每个手指有四个自由度,整体有16个自由度,由5个电机同时进行驱动,自由度越高在实际应用中的功能越强,而且这个机械手的重量很轻,而且很轻薄,在很多机械手上都能够很好地安装,仿人性能特别好,外形与人手极为相似,所以在商业上的应用极为广泛,能代替人手完成很多工作[6]。
英国一家公司研究出的机械手,其中的肌肉是Airmuscle完成的,直到现在也是与人手的形状和功能最为接近的机械手之一,总共有24个自由度,仿人性能极佳,而且加上了关节和指尖的触觉传感器,对外界情况很敏感。它的驱动部位位于前臂内,由于采用绳索传动,所以机械手的整体体积也很小,其主要材料是聚甲醛塑料和铝,承重强而且灵活[7]。手指的自由度很高,所以可以支配它完成很复杂的功能,在工作工程中其对力的大小控制堪称完美,所以其在工业上的用途也相当广泛,焊锡等复杂操作也不在话下;再比如它在家务劳动方面也能脱颖而出,他可以帮您收拾重量不一物品,而不会出现损坏的情况,更不会出现拿不起来的情况。柔性机械手在未来的设计的目标是在驱动源、传感技术和控制技术上有所突破,必须将这些技术完美地进行协调工作,才能让机械手实现更多的功能,在实际中的应用也更强[8]。
1.2.2 柔性机械手的国内研究现状
直到20世纪80年代机械手的研究工作才在我国开始展开,但是进展缓慢,将其应用到实际中并且在工作中使用起来更是困难重重。经过不懈的研究探索,终于取得了很大的进步,由哈尔滨工业大学和德国宇航中心合作研究制作的新一代多指仿人机械手“HLT/DLR Hand”及其改进型在国际舞台上崭露头角,在很多机器人展会上也得到了关注,现在第三代也正在紧锣密鼓的筹备完成中[9]。
目前,国内的柔性机械手的发展也在稳步进行之中,在自由度、形状和动力模块等方面都有了很大的提升,更为关键的是自主研发的机械手在各个领域都有了很实际的应用,机械手发挥出了其重要的功能。国家在机器人的研究上也有了越来越多的重视,加大了该方面的研究投入,在近期的国家科学与技术发展纲要中明确指出了发展智能机器人的重要性[10]。作为机器人的重要组成部分,研制出高端灵活可靠的柔性机械手至关重要,也将为我国的航空航天事业、医疗服务事业和家务劳动事业等关乎国计民生的重要行业做出贡献[11]。
1.3 本论文的主要工作
本课题主要是基于力反馈的柔性机械手控制策略研究,包括以下内容:
- 对气动柔性机械手的仿生学研究以及仿人机械手的控制理论展开研究,但是技术研究都是基于理论知识上的,对柔性机械手的特点和设计过程有清晰的认识。
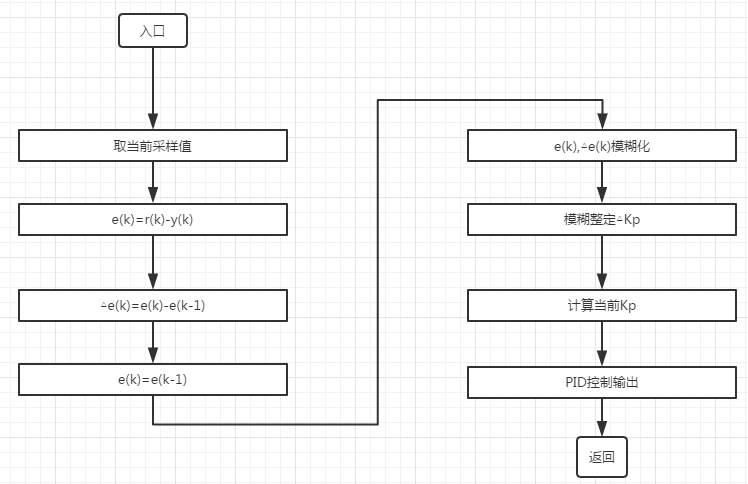
- 研究柔性机械手的过程中,通过引入力反馈,利用迭代控制算法控制手抓的抓取力度。算法的仿真用labview和matlab来实现,并将算法在实际柔性手抓上加以利用。
- 在实际柔性机械手上使用薄膜压力传感器和电阻电压传感器模块,再利用labview的仿真模块来完成对实际数据的采集,再对数据进行处理,最终确定最佳的力的大小,并验证算法的鲁棒性。
本文在撰写的过程中将把以上所述内容划分为五章,除了本章绪论外将在第二章介绍柔性机械手设计的原理、理论和相关研究;在第三章介绍柔性机械手的实际控制;在第四章进行实验的真正操作和数据的采集和处理;最后在第五章做总结与展望。
第2章 柔性机械手的相关理论研究
柔性机械手的相关理论研究是设计一个完美机械手结构和功能的基石,只有对理论研究透彻了,才能进行下一步的研究。而设计又是运动学分析和控制策略研究的基础,人手的发达程度是经过千万年的演变得来的,其所有的灵巧的结构和对力的大小的完美控制都使它成为仿生机械手的理想模型。
2.1柔性机械手的仿生学原理
仿生学研究一直以来就是人类所钻研的一个方向,人们想通过对每种生物的身体构造的研究来模仿生物制造出一些特定的构造和技能,从而让他们辅助我们人类更好地了解地球、改造地球和适应地球。现代仿生学在机器人学中应用广泛,在机器人仿生学中通过分析生物体骨骼、肌肉关节和韧带的特征来仿造出与生物体所特有的结构类似的仿生体,在结构类似的基础上仿造出功能类似的物体应用起来,从而将其应用到特定的环境中完成特定的操作[12]。
仿生机器人已经在全世界很多国家有了很多的发明和应用,例如FESTO公司在2009年发明了仿生袋鼠,在这项发明中FESTO公司创造性地将气动和电动结合起来。通过控制袋鼠的完美跳跃动作,它的精确控制和恰到好处的调节技术,来实现它的跳跃和完美着陆,同时,由于机身的结构的轻巧性,也提供了很大的帮助。通过这只仿生袋鼠,FESTO公司通过技术上的完美应用实现了袋鼠的特殊运动过程,真正的袋鼠在跳跃时会自行储存能量,在下一次跳跃时释放,这只仿生袋鼠也能做到这样,实现能量的存储和释放[13]。

图2.1 仿生袋鼠BionicKangaroo
仿生学问题来源于人类所面临的各种问题,仿生写的研究一直以来就是人类所研究的重点问题,当然仿生不只是对外观的简单模仿,还要求功能特性也能满足要求,本节主要是通过借鉴以往仿生学的经典成功案例和机器人仿生学的思想来完成对柔性机械手的仿真设计。
2.2 影响柔性机械手抓取能力的因素
柔性机械手克服了传统的机械手存在的缺陷,不仅变得很灵活,而且在面对不同的环境时,能很快的改变策略来适应不同的环境,柔性机械手是一种应用时间不久的抓取装置,对于不同形状的物体都能实现抓取动作,所以在对形状不确定的领域和对力度大小精确度很高的领域应用很广泛。而且柔性机械手的优点在于结构简单、造价较低和维护方便等等。现阶段国内对于这个领域已经有了很多的研究,经过良好设计的柔性机械手末端夹具在很大程度上提高了抓取的速度和对最大程度地对抓取物体进行保护,所以关键在于对影响机械手抓力大小的因素的研究,对未来柔性机械手的改进提供了方向。
2.2.1 柔性机械手抓取原理
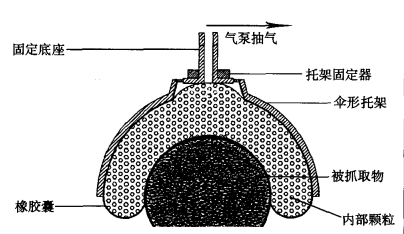
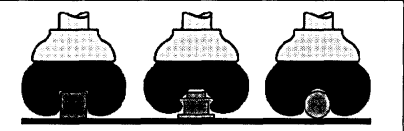
机械手的驱动是一种被动的机械装置,其形状类似于伞,顶部是和伞形类似的托架,托架下面是柔性囊,柔性囊是预制相连的,囊内放入了很多颗粒状的材料,进行气压控制的装置直接与囊相连。在抓取过程中,将机械手下压的过程中,内部的颗粒会开始运动,其运动会迫使机械手将目标物体覆盖住,并且不会受到物体形状的影响,再通过气压控制装置进行抽气,使机械手与物体贴合紧密,而且机械手的形状会根据物体的形状发生弹性形变,从而达到了抓取不同形状物体的目的,抽气的力度决定了抓取时力的大小,所以不同质量的物体在抓取时力度的调整也很容易,但是缺点是力的最大值有限,对质量过大的的物体不能进行有效的抓取[14]。抓取的动作的结束,首先是放气,抽气动作停止就会松开物体,物体下落,动作就完成了。根据这一个原理,设计并制作了一个由橡胶制作的囊的机械手,如图2-2和图2-3说明了抓取的原理。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: