气动肌肉驱动的脚踝康复机器人运动控制研究毕业论文
2020-02-17 22:00:18
摘 要
近年来,医疗康复行业的智能化已成为研究的热点。康复机器人在缓解大量患者的康复需求和帮助踝关节损伤患者进行更准确有效的康复训练方面发挥着重要作用。然而,目前大多数踝关节康复机器人都是刚性的,并且结构复杂,灵活性差并且缺乏安全性。气动肌肉具有质量轻,输出功率/自重比大、不需要传动装置、安全性好,结构简单,动作灵活。本文研究的机器人是气动肌肉驱动的并联二自由度踝关节康复机器人。利用反演滑模控制方法对机器人的运动进行实时控制,解决气动肌肉在运行过程中的非线性特性和人机交互过程中的不确定性,保证安全。本文研究了PID控制算法和BS_SMC控制算法对机器人的控制准确度,分为有受试者和无受试者两组实验。实验结果证明BS_SMC控制算法更能实现该二自由度脚踝康复机器人的高精度位置控制。康复机器人的研究对于提高康复效率、保证康复质量、缓解人们的康复需求、降低医疗从业人员劳动强度具有重要意义。
关键词:气动肌肉;并联机器人;脚踝康复;逆运动学模型;反演滑模控制
Abstract
In recent years, the intelligence of the medical rehabilitation industry has become a hot research direction. Rehabilitation robots play an important role in relieving the rehabilitation needs of a large number of patients and helping patients with ankle injuries to perform more accurate and effective rehabilitation training. However, most ankle rehabilitation robots today are rigid and complex in structure, poor in flexibility and lack of safety. Pneumatic muscle has light weight, large output power / self-weight ratio, no need for transmission, good safety, simple structure and flexible action. The robot studied in this paper is a parallel two-degree-of-free ankle rehabilitation robot driven by pneumatic muscles. The inversion sliding mode control method is used to control the motion of the robot in real time, to solve the nonlinear characteristics of the pneumatic muscle during operation and the uncertainty in the process of human-computer interaction to ensure safety. In this paper, the control accuracy of the PID control algorithm and the BS_SMC control algorithm for the robot is studied. It is divided into two groups of subjects and no subjects. The experimental results show that the BS_SMC control algorithm can achieve high-precision position control of the two-degree-of-freedom ankle rehabilitation robot. The research of rehabilitation robots is of great significance for improving rehabilitation efficiency, ensuring the quality of rehabilitation, alleviating people's recovery needs, and reducing the labor intensity of medical practitioners.
Keywords: Pneumatic muscle;parallel robot;ankle rehabilitation;inverse kinematics model;backstepping sliding mode control
目 录
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 2
1.3 论文内容安排 4
1.3.1 本文的主要研究内容 4
1.3.2 本文的组织结构 4
第2章 气动肌肉建模及并联机器人的逆运动学模型 5
2.1 气动肌肉建模 5
2.1.1 气动肌肉的理想模型 5
2.1.2 三元素建模 6
2.2 脚踝康复机器人平台 11
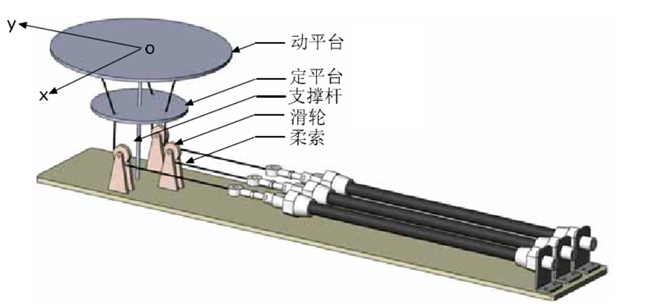
2.2.1 脚踝康复机器人的构成 11
2.2.2 脚踝康复机器人的逆运动学模型 13
第3章 脚踝康复机器人的位置控制方法 16
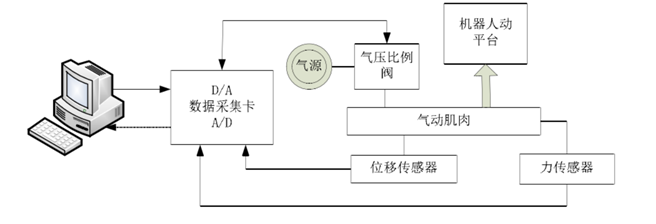
3.1 机器人位置控制系统方案 16
3.2 PID控制方法 17
3.3 反演滑模控制 18
3.3.1 控制器的设计 18
3.3.2 稳定性分析 20
3.4 实验结果与分析 21
第4章 总结与展望 25
参考文献 26
致 谢 28
第1章 绪论
1.1 研究目的及意义
气动肌肉的原始模型最早出现于20世纪30年代,由美国人R.C.Pierce提出[1]。气动肌肉最初的目的并不是利用膨胀收缩来产生拉力,而是用它的横向膨胀产生爆炸来代替炸药。到了50年代,美国医生J.L.Mckibben首次提出了气动人工肌肉的概念,将其运用于医疗领域发明出一种帮助残疾手指运动的气动装置,即Mckibben气动肌肉。80年代,日本Bridgestone Rubber公司针对Mckibben气动肌肉的不足研发出了改进型的Rubbertuator气动肌肉[2]。这种新型的气动肌肉首次采用了橡胶管作为内壁,这使得气动肌肉拥有了柔性,并利用该型气动肌肉设计出了一种用于喷漆的柔性机械臂。由于机械臂的实际投产运用,大家开始发现气动肌肉具有很强的商业应用价值,并相继研发各种类型的气动肌肉。现在研究的各类气动肌肉的大致原理都是基于Rubbertuator型气动肌肉。它结构简单,内部为一根圆柱形橡胶管,外部为双螺旋线编织的刚性编织网,对其两端进行封装形成一个密闭的环境,然后一端接气源,一段接负载。在实际工作时,通过气源端对其充气,橡胶管内压力增大会径向膨胀,但外部的刚性编织网不能伸长,所以气动肌肉长度会缩短,直径变长。这时,当气源端固定时,负载端能产生拉力[3]。其运动方式与生理肌肉相似,即发力时收缩,放松时舒张,而且其力与长度的比例特性曲线也相似。
从国家老龄问题办公室举行的全国人口老龄教育新闻发布会上了解到,截至2017年底,中国60岁及以上老年人口数量达2.41亿人,占总人口数量的17.3%。 社会普遍认为认为,当60岁及以上老年人口数量达到总数的10%,这就意味着社会进入了老龄化状态。据估计,到2050年前后,中国老年人口数量将达到峰值4.87亿,占总人口的34.9%。随着年龄的增长,老年人的身体状况会出现明显的下降,出行和日常生活会有障碍。心脑血管的退化也会导致中风和偏瘫。据国家统计局数据显示,2017年全年发生的交通事故数量为203049起,受伤人数为209654。受伤严重的人中大多是肢体残疾或者枢神经系统损伤。据中国残疾人联合会发布的数据显示,目前我国残疾人总数超过8500万,其中肢体残疾人数近2500万。
中风与偏瘫一样,是一种静态(非进行性)脑损伤。大多数患者会出现一些残余运动障碍。在这个阶段,患者的神经康复只限于临床医生提供的物理或职业治疗(并且可能通过机器人工具增强),以促进神经恢复并减少不好的后果。肢体残疾或者中枢神经系统损伤患者将在其整个生命周期中将承受进一步衰弱的继发性损伤,这是由于他们的步态模式不佳[4]。因此,探索改善步态康复的方法至关重要。而根据残联的报告显示到2018年为止,全国的康复机构数量为9036,从业人员数量为25万人,其中只有3737个提供肢体康复服务。从数据可以看出,康复机构和康复人员远远不能满足残疾人的康复服务的需求。而现阶段这种康复大多只能通过康复师一对一来完成。而且每一位病人的情况不同,康复师需要制定不同的康复方案来治疗患者。如果想要取得理想的效果,就需要康复师进行高强度、重复性的治疗,这样需要很长的时间,会花费巨额费用。康复师的水平也因人而异,而且其数量也远远不能满足市场的需求。面对这种情况,采用康复机器人来代替康复师完成对患者的治疗将会极大的满足康复人群的需求。将智能机器人技术运用于康复领域不仅可以减轻康复师重复繁重的体力劳动,还能够保证康复质量。机器人还可以存储治疗的大量数据供康复师参考,为进一步的治疗提供参考。最大的优势就是可以解决康复师人数不足的问题。
从上世纪80年代开始,许多学者就已经开始研究机器人在医疗领域的作用。到现在我们能见到各类的机器人。其中比较著名的便是运用于外科外科手术的达芬奇手术机器让医生在千里之外完成一台手术的操作。而在康复领域传统的电动和液压执行器具有很高的刚度,但对于可穿戴的应用来说太重且太硬。他们需要非常复杂的反馈来实现合规性。而气动肌肉的运行原理和生物肌肉很相似。相比于其他传统的各种驱动装置,气动肌肉它具有质量轻,输出功率/自重比大、价格低等优点。最重要的是其不需要传动装置,只要有气源就能直接驱动,安全性好,结构简单,动作灵活。尽管气动肌肉相对于传统致动器具有明显的优势,但它们的非线性特性和时变参数导致难以对其进行建模、控制行为和设计高性能定位系统的控制器。康复机器人的研究对于提高康复效率、保证康复质量、降低劳动者的劳动强度具有重要意义。
1.2 国内外研究现状
近年来,全球范围内的学者和各类机构已经开发出各类用于下肢康复的机器人。这些机器人大致可分为两类,一类是外骨骼机器人,另一类是末端执行器机器人[5]。例如,比较著名的外骨骼机器人有Lokomat[6],BLEEX[7] 和LOPES[8] 。末端执行器机器人则有Rutgers Ankle[9] 和Haptic Walker[10]。对这两类机器人来说,外骨骼机器人可以分为基于跑步机的辅助机器人和基于矫形器的机器人,而末端执行器机器人可分为基于脚踏板和基于平台这两种类型。
基于跑步机的外骨骼机器人由体重支撑系统和佩戴在下肢上的外骨骼两部分组成。Lokomat是最典型的基于跑步机的外骨骼的代表,由来自瑞士的Hocoma开发,它具有体重支撑机制,患者的腿被绑在可调节的框架上,为臀部和膝盖提供动力辅助。由特温特大学的Veneman等人开发一个新的步态训练机器人LOPES,它结合了可平移和2-D驱动的骨盆段和腿外骨骼,腿外骨骼包含三个致动的旋转关节。在跑步机上行走时,LOPES可以与人的腿平行移动。特拉华大学的研究人员开发了一种活动腿部外骨骼ALEX[11],它是一种动力腿矫形器,在髋关节和膝关节处具有线性致动器,并且开发有力场控制器以在行走期间为患者提供帮助。尽管基于跑步机的机器人装置在一定程度上可以减轻康复师的工作,但是其整个装置比较复杂,操作也需要多人配合,其重量支撑机构也限制了病人的自由运动。
基于矫形器的机器人代表有加利福尼亚大学开发的Berkley下肢外骨骼BLEEX,它是一种外骨骼装置,用于提高穿着者的力量和耐力。BLEEX有七个自由度,其中四个由液压执行器驱动。来自麻省理工学院的Blaya和Herr开发了一种活动脚踝矫形器AAFO[12],其主要用于跌足步态病理学的研究。密歇根大学的Sawicki和Ferris开发了一种由人工气动肌肉驱动的膝-踝-足矫形器KAFO[13],它在人类行走期间提供弯曲和伸展扭矩。柏林科技大学的Fleischer等人开发出动力矫形器,其中通过EMG信号评估受试者的预期运动。来自日本的筑波大学和Cyberdyne开发的Hybrid Assistive Limb(HAL)用于康复和重度支撑的全身外骨骼。HAL中还使用EMG信号来测量人机交互的水平。然而,对于截瘫患者来说这种技术很难实现,因为瘫痪的肌肉不能产生有效的EMG信号。尽管通过这些矫正系统可以实现灵活的步态康复,但是诸如高能量成本的缺点也阻碍了它们的广泛应用。
基于脚踏板的机器人中较出名的是由德国的Reha-Stim设计的步态训练师GTI[14],其具有开创性,它允许模拟各种步态模式和步行速度,力、扭矩传感器位于每个踏板下方,以帮助患者恢复其下肢运动能力。来自查理特大学医学院的Hesse等人,设计了一种名为Haptic Walker的下肢康复机器人,它由两个机械板组成,可以驱动患者的肢体,实现任意运动。Haptic Walker是基于GTI原理的重大改进。来自瑞士的Reha Technology AG设计的G-EO-Systems[15]最近用于模拟步行和爬楼梯的研究。它由两个脚踏板组成,可以垂直和水平运动编程,实现步行和攀爬运动。G-EO-Systems是基于Haptic Walker的设计原理,但规定尺寸较小。
基于平台的机器人只需将其下肢(通常是脚)固定在平台上,输入康复计划便可以进行康复治疗。由于结构简单,适应性强,并联机器人在基于平台的医疗机器人中越来越受欢迎。来自意大利的Istituto Italiano di Tecnologia(IIT)提出了一种用于踝关节康复的并联机器人ARBOT[16],并设计了一种新的定制线性执行器。来自新西兰奥克兰大学的Xie等人开发了并联机器人Parallel Ankle robots[17],用于在3个自由度训练中进行踝关节康复训练。首先,设计了一个由直流电机驱动器驱动的四连杆机器人,然后是一个可穿戴的4轴冗余并联机器人,由人工气动肌肉驱动,具有灵活轻便的特点。来自美国的罗格斯大学的Girone 等人设计的Rutgers Ankle[18]是一款基于Stewart平台的典型踝关节康复机器人。通过其六个电动机的协调控制实现该运动。该系统进一步扩展到双Stewart平台配置,用于步态模拟和康复。
1.3 论文内容安排
1.3.1 本文的主要研究内容
文首先对气动肌肉模型进行研究,建立气动肌肉的三元素模型。然后介绍其驱动的二自由度脚踝康复机器人的硬件组成。根据机器人的硬件组成建立空间位置模型并求解出该机器人的逆向运动学模型。最后设计该机器人的位置控制算法(滑模控制算法),实现该二自由度脚踝康复机器人的高精度位置控制。在康复机器人实际运行时,可以向其输入预定的运动轨迹,机器人根据输入的预定运行轨迹带动患者的脚踝进行康复运动。根据每一名患者的不同康复需求,康复师可以为其制定合适的运行轨迹并输入机器人。
1.3.2 本文的组织结构
本文的组织结构安排如下:
第1章介绍了研究目的及意义,大致介绍了国内外康复机器人的研究状况,最后介绍了本文的组织结构。
第2章介绍了气动肌肉的工作原理并建立了气动肌肉的三元素模型。介绍了脚踝康复机器人的构成并建立了其逆运动学模型。
第3章介绍了脚踝机器人的位置控制方法,控制器采用反演滑模控制的方法对机器人进行高精度控制。
第4章对全文完成的工作进行了总结并对文中的一些问题提出了自己的思考和展望。
第2章 气动肌肉建模及并联机器人的逆运动学模型
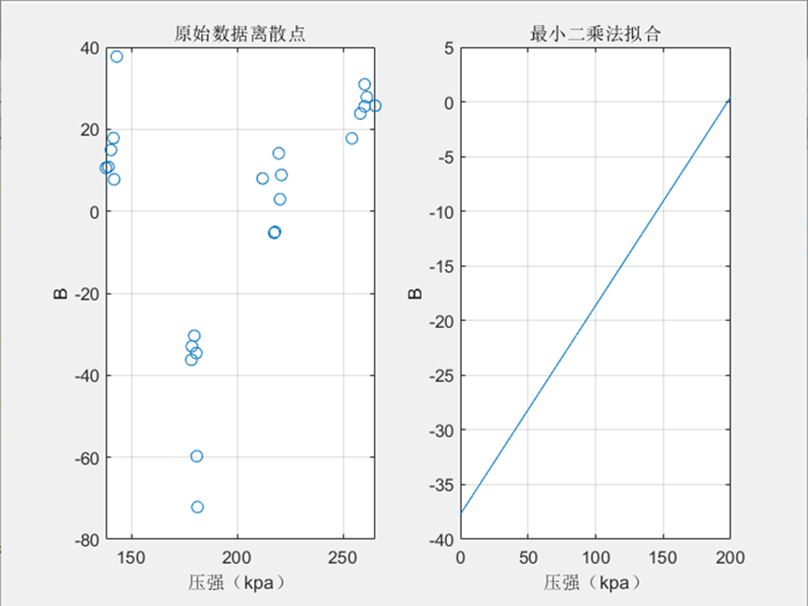
气动肌肉虽然相对于传统的驱动器具有明显优势,但其准确的数学模型却很难建立,主要原因是其具有非线性和时变性。Chou和Hannaford根据能量守恒原理建立气动肌肉的基本理论模型[19],得到了气动肌肉收缩力、压强和长度之间的关系式。哈尔滨工业大学的隋立明等通过建立力、压力和长度的多项式[20],采用实验数据拟合的方式对气动肌肉进行了建模。Reynolds等人,提出了一个新的气动肌肉的模型即三元件动力学模型[21],由弹簧元、阻尼元和可收缩元件组成,以平行配置排列,来描述气动肌肉内部构造的动态特性。通过利用诸如静态加载,阶跃输入加载扰动,收缩和松弛研究的方法,来获得可用于商业化的现象学模型的参数。其实验结果可以单独表征弹簧,阻尼和收缩力的系数。
2.1 气动肌肉建模
2.1.1 气动肌肉的理想模型
PMA是一种机械装置,其模拟生物肌肉的行为,其中压力作为激活参数。本实验中测试的PMA由复合结构构成,该复合结构由具有嵌入的高强度纤维的橡胶基质组成,用于支撑和致动。内腔的一端密封,另一端有气体入口/出口。当装置加压时,内囊随着腔室内的气体体积增加而产生径向方向膨胀。由于内部加压和外部纤维护套的不可伸长,PMA收缩或缩短在纵向上产生力。该基本操作的示意图如图2-1(a)所示。到目前为止,已有三家公司将其PMA推向市场:普利司通(久留米,日本福冈),影子机器人公司(英国伦敦)和Festo公司(德国埃斯林根)。气动肌肉工作原理如图2-1(a)所示:气体通过空气输入口输入到气动肌肉中,橡胶管内充气膨胀外部编织网不能伸长导致整个气动肌肉长度收缩、直径增大,以产生向上的位移。上一段介绍了几种模型,本文主要研究Reynolds提出的三元素模型,其动态现象学模型如图2-1(b)所示,由收缩元、弹簧元和阻尼元三部分并联而成。但该模型三个元素的表达式都可以单独表示出来,每一个表达式的系数都是独立的。设y为气动肌肉的位移长度,则该模型的运动控制方程可表示为:

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: