基于加速度传感器的倾角仪的设计与实现毕业论文
2020-05-22 21:12:09
摘 要
随着市场需求和科技的发展,角度测量仪器在航空、路基和机械工程等领域发挥重要的作用。同时,利用MEMS技术的倾角传感器满足了行业对于测量的可靠性和稳定性的要求,并且凭借微型化和集成化的优势迅速发展,成为测量行业的热点之一。
本文基于Freescale公司的MMA7455三轴加速度传感器,设计并实现了一个三维空间的倾角测量装置。该系统采用MMA7455采集加速度数据,然后经过STM32主控模块处理并通过TFT LCD显示当前倾角值,同时数据通过串口输出到PC机的串口调试助手上。论文详细介绍了硬件和软件的设计过程,并完成了必要的系统软硬件测试。在硬件方面使用Altium Designer 进行硬件电路原理图绘制,采用芯嵌开发板搭建硬件电路平台。在软件方面使用Keil uVision4编程环境,采用C语言编程实现传感器数据采集、处理和显示的过程。
实验结果表明,该系统能够实时测量并显示倾角值,并且具有较好的稳定性和精度。
关键词:MMA7455 加速度 倾角 STM32
Angle measuring instrument design and implementation based on acceleration sensor
Abstract
With the market demand and the development of science and technology, angle measuring instruments play an important role in the fields of aviation, roadbed and mechanical engineering. At the same time, the inclination angle sensor based on MEMS technology meets the requirement of reliability and stability of the measurement industry. What’s more, with the advantages of miniaturization and integration it develops rapidly. Altogether, it has been one of the hot spots in the measurement industry.
In this paper, a three-dimensional space inclination measuring device is designed and implemented based on the three axis acceleration sensor-MMA7455 which comes from Freescale. The system use MMA7455 to measure the acceleration data. Then, the current angle data is processed by the STM32 main control module and displayed on the TFT LCD monitor. Besides, the data can be shown on the SSCOM through the PC computer series port . This paper introduce the design process of hardware and software, and it also completed the necessary hardware and software testing. This paper use Altium Designer to draw hardware, use Xinqian development board to build the hardware circuit platform. In terms of software, this paper use Keil uVision4 to write C program. So the process of sensor data acquisition, processing and display is realized.
The experiment result that the system can measure and display the current dip angle along with stability and accuracy.
Keywords: MMA7455; Acceleration; Dip-angle; STM32
目 录
摘 要 I
Abstract II
目 录 III
第一章 绪论 1
1.1 课题来源及研究背景 1
1.2 国内外的研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 1
1.3 本文的主要工作 2
第二章 系统总体设计方案 3
2.1 系统设计框图 3
2.2 系统的工作原理 3
第三章 系统硬件设计 5
3.1 系统硬件设计框图 5
3.2 主控模块 5
3.2.1 芯嵌STM32开发板简介 5
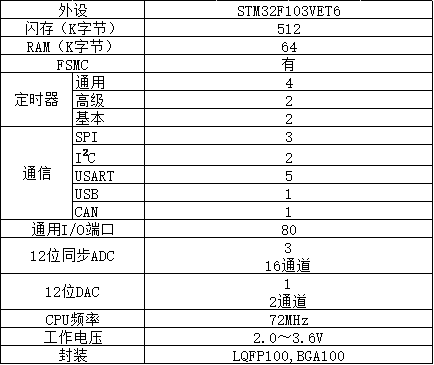
3.2.2 STM32特性与参数 6
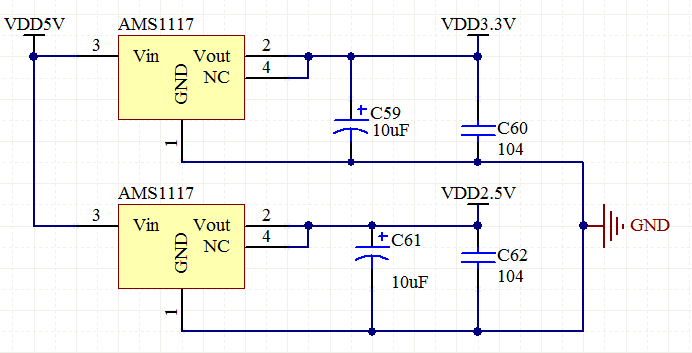
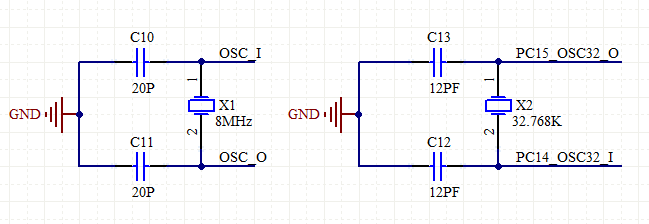
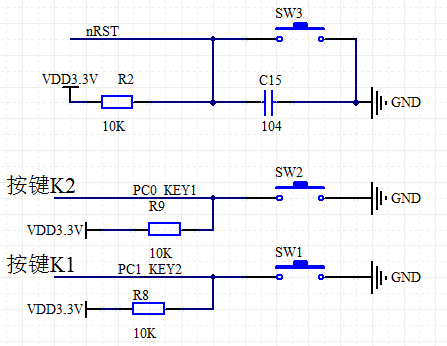
3.2.3 最小系统 7
3.3 数据采集模块 9
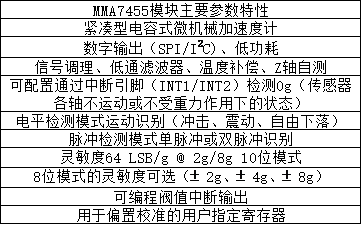
3.3.1 MMA7455介绍 9
3.3.2 MMA7455特性与参数 9
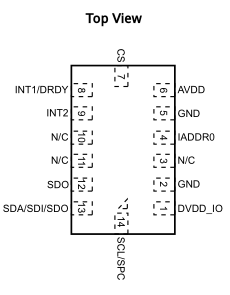
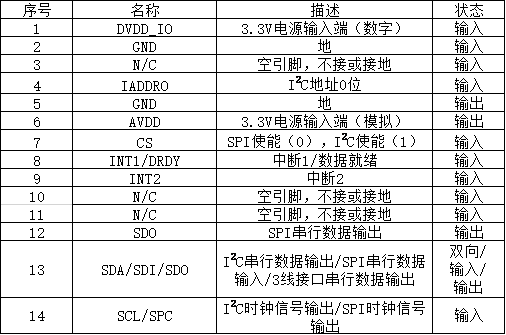
3.3.3 MMA7455引脚 10
3.3.4 MMA7455电路原理图 11
3.4数据显示模块 12
3.4.1 LCD简介 12
3.4.2 FSMC介绍 12
3.4.3 ILI9341 13
3.5 串口模块 15
第四章 系统软件设计 17
4.1 系统程序流程图 17
4.2 系统初始化 18
4.2.1系统时钟设置 18
4.2.2 SPI设置 18
4.3 数据采集模块 20
4.3.1 GPIO配置 20
4.3.2 MMA7455寄存器配置 21
4.3.3 传感器采集数据的读取 23
4.4 串口输出模块 24
4.5 数据显示模块 26
4.5.1 初始化LCD 26
4.5.2 FSMC配置 27
4.5.3 图像显示配置 28
4.5.4 数据显示模块软件流程图 29
第五章 系统的调试与分析 30
5.1 系统软硬件调试 30
5.1.1 系统硬件调试 30
5.1.2 系统软件调试 30
5.2 测试结果及分析 31
第六章 总结与展望 33
6.1 总结评价(遇到的问题和解决方案) 33
6.2 展望 34
参考文献 36
致 谢 38
第一章 绪论
1.1 课题来源及研究背景
如今,一些测量行业在从事作业时仍然采用传统的水泡水平测量,这种方式成本低但存在较大的测量误差和应用范围小的局限,而测量行业所用的专业测量设备需要较高的成本投入,不能满足大多数从业者的需求[1]。倾角传感器的设计和应用能克服这些弊端,在满足低成本的同时,能保证有较好的稳定性和精度[2]。
倾角传感器是测量静止状态下物体倾斜偏差角度的装置[3]。目前,市面上存在各种类型的倾角传感器,但是大多数传感器角度测量的范围和产品规格不能满足行业应用的要求 [4]。基于MMA7455传感器的倾角仪和其它倾角仪相比,它突出的地方是使用方便、能测量三维角度值、精度高和角度范围广[5]。同时,MMA7455是MEMS技术制成的加速度传感器,其体积小、功耗低、成本低、易于实现智能化和数字化[6]。所以倾角仪能应用在许多产品中,比如手机、平衡车和飞行器,具有很好的应用前景。
1.2 国内外的研究现状
1.2.1 国外研究现状
全球的传感器制造公司致力于MEMS倾角传感器技术的研究,就产品分布而言,主要集中在欧美几家大公司,如美国数字公司、美国Atmos工程公司以及德国西门子公司[7]。就产品种类来看,目前数量还比较少,从传感器的测量精度、体积、智能化和数字化等性能指标来看,传感器还有很高的发展前景和应用价值 [8]。芬兰VTI科技公司拥有全球较为领先的3D MEMS专利技术,为世界范围内的客户提供高精度的倾角测量产品。其研制的基于3D-MEMS技术的SCAl03T系列传感器具有较高的测量精度和抗震性,目前居于世界前列[9]。
1.2.2 国内研究现状
我国从1960年开始进行传感器技术的研究,目前我国传感器技术已经取得很大的进步,主要表现为[10]:建立了国家重点实验室、传感技术国家重点实验室、国家传感技术工程中心等[11];MEMS研究项目列入了国家高新技术发展重点;全国有2000多家企业和机构从事传感器的研究、生产和应用[12]。
1.3 本文的主要工作
本文做的工作有如下几个方面:
- 分析国内外倾角传感器的研究现状和测量仪器的发展趋势;
- 设计系统硬件平台,包括MMA7455数据采集模块、主控模块、串口模块和显示模块器件型号的选择,电路原理图绘制和实物的连接;
- 完成相关模块的软件设计与调试;
- 系统软硬件测试以及采集数据校正优化。
工作的重点在于主控模块STM32对传感器输出的加速度数据的处理和分析。传感器输出的加速度值是补码的形式,所以要在主控模块的程序中构建库函数,完成寄存器数据对应映射的转换过程。同时,因为传感器采用SPI总线方式和STM32相连,所以在绘制硬件电路图搭建硬件平台时注意管脚之间的连接和接地等事项。
本文的主要内容如下:
- 第一章绪论中,阐述倾角传感器的课题来源、应用背景和国内外的研究现状,交代设计的主要工作。
- 第二章的系统总体设计方案中,给出系统总体设计结构,并阐述倾角器通过计算将加速度数据转换成倾角值的工作原理。
- 第三章的系统硬件设计中,给出系统硬件平台结构框图,并针对各模块具体阐述器件选型、器件的特性和参数以及器件的管脚连接。
- 第四章的系统软件中,给出系统软件流程和编程思路,列举关键部分的代码具体解释工作原理。
- 第五章系统的调试与分析,给出系统软硬件的调试过程,测试并分析设计的结果,判断设计是否达到预期的要求。
- 第六章的总结与展望,总结在设计过程中遇到的问题和采用的解决方案,对传感器的未来发展进行合理的分析和预测。
第二章 系统总体设计方案
2.1 系统设计框图
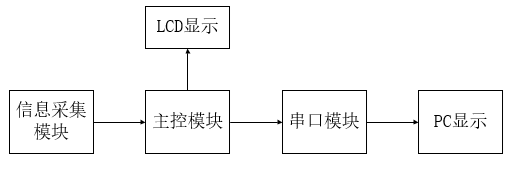
相关图片展示: