基于ARM的无人船自动航行控制器设计开题报告
2020-02-18 18:35:32
1. 研究目的与意义(文献综述)
水是生命之源,地球上超过70%的地区都被水覆盖着,人类的文明也离不开水,大河流域孕育了四大文明古国,海洋流域造就了古希腊的繁荣商业。然而随着工业化的进行,全球环境加剧恶化,雾霾、气温上升等问题层出不穷,作为气候的调节器,河流、海洋的作用非常重要,所谓“工欲善其事,必先利其器”,为了防止水域的环境恶化,对于水域环境、水质的监测不容小视。
目前大多数对流速、水质、水位等水文数据的探测依靠人工采集,然而人工采集的业务量大、效率低、数据不准确,并且很多水域的工作环境异常恶劣,工作人员的工作风险很高,比如对海洋气候的监测中,面对风暴、洋流等情况人工作业的危险系数极高,因此有必要开发出一种低成本、低风险、高效率的无人智能监测平台。无人船技术的发展恰好可以弥补人工作业的缺点。首先,无人船的船体小,灵活性较高,造价较低;其次,机器人、智能传感器、无线传感网、数据的通信与传输等技术可以很好的融合在无人船技术上。这样的背景下,无人船将集环境水质监测、水下测绘、科学探测、搜索救援、安防巡逻于一体,起到极其重要的作用,甚至可以发展到军事作战领域。
相对于国外发达国家,我国的无人船技术起步较晚,我国第一艘自主研发的海洋监测船是由气象局与航天科工集团合作研发的“天象一号”,该船长6.5m,船体由碳纤维构成,于2008年奥运会期间监测青岛奥帆赛区的气象情况,采集水文数据。该无人船探测系统由两部分组成:一是海上无人探测平台,二是地面控制系统。经过测试,“天象一号”的各设备运行正常,数据准确,验证了该无人船水上气象采集系统的准确性、实时性、安全性及可靠性,为国内无人海洋气象监控开创了先河,奠定了基础。2014年,在上海举行的2014国际海洋技术与工程设备展览会上,由珠海的云洲智能科技有限公司研发的"领航者"号无人船更加吸引了很多人的目光。
2. 研究的基本内容与方案
本次毕业设计的基本内容是对靠多个电机驱动的无人船提供基于arm的自动航行控制器设计,该控制器包括对多个电机的智能驱动,使之能前进、后退、左右拐弯等路径行进;通过4g通信模块的交互获取无人船自动航行时的姿态数据,gps数据,探测数据等。
系统框图如图1所示: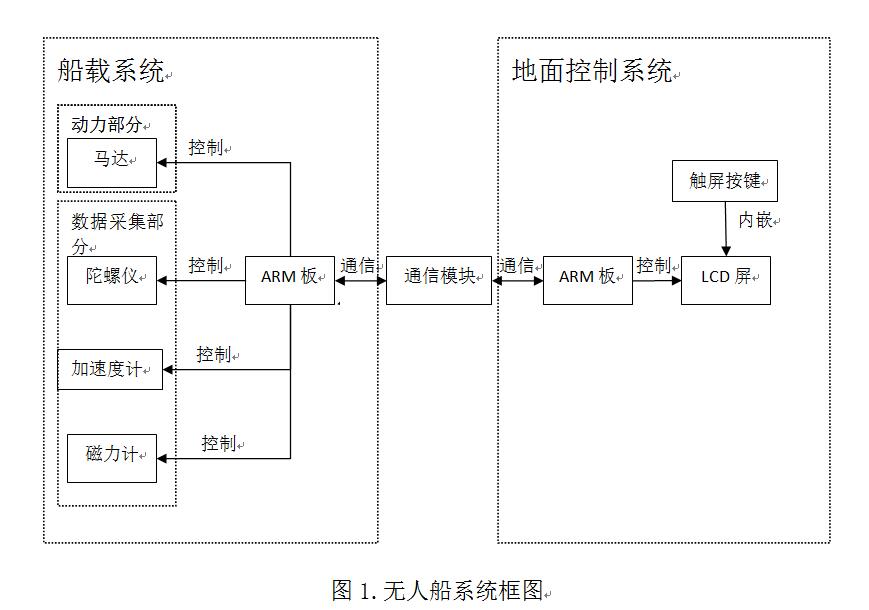
整个设计分为两个部分,水上船载系统和地面监测控制系统,船载部分主要包括马达、陀螺仪、加速度计、磁力计,其中马达属于动力部分,其他属于姿态信息采集部分。
3. 研究计划与安排
1-3周 查阅中、英文资料,完成开题报告,完成不少于2万字符的英文翻译任务;
4-8周 学习和熟悉arm的开发,学习陀螺仪、加速度计等各个传感器的工作原理,使用arm板调试;
9-13周 熟悉4g通信模块的相关协议,用arm板设计地面控制端的交互界面,完成船体与地面的通信;
14-15周 将各个模块与船体进行联调,下水进行测试获取数据并完成基本的论文书写;
16周 修改完成毕业论文,答辩。
4. 参考文献(12篇以上)
[1]罗意,措姆.基于物联网通信技术的水质检测无人船[j].山东工业技术,2019(07):144.
[2]葛荣,乔大雷,张超.基于android的无人船地面站控制和监测系统设计[j].现代信息科技,2018,2(09):177-178 180.



