双电机运动控制系统软件设计毕业论文
2021-03-15 21:04:19
摘 要
贴片机在电子设备生产线上是非常重要的一个环节,能自动完成电子元器件贴装的精密设备,通过移动贴装头到指定位置拾取贴片元器件并将元器件精确的放到相应的 PCB 板上。 近些年来,随着中国电子行业的迅速发展以及电子元器件的微型化、电路板的复杂化,国内对贴片机的要求也越来越高。目前,我国国内存在大量的中小型电子公司,在产品的研发初期,需要花费大量的人力、物力在电路样品的制作上,所以对贴片机进行研究并设计自有的贴片机对电子公司而言具有非常重要的意义。
本文基于实验室自主研发的贴片机,对贴片机的 X-Y 轴的运动控制系统进行研究分析并设计相应的控制系统以实现 X-Y 轴的高速运动及精确定位。本文首先对 X-Y 轴的运动进行分析,包括基本运动以及组合运动以选择合适的执行机构实现各个运动并达到贴片机的 X-Y 轴运动控制的要求。通过对异步电机、直流伺服电机、交流伺服电机等方案进行对比选择交流伺服电机作为 X-Y 轴的执行器。围绕交流伺服电机驱动模型,选择了合适的电机控制方案、双电机运动控制方案、双电机位置反馈方案等,具体方案实施从软件设计着手,软件主要分为两个方面:一是双电机驱动软件的实现,包括电流环、速度环和位置环等三闭环控制程序;二是双电机联动控制算法的实现,通过对基准脉冲算法和基于数据采样算法两种插补算法进行探讨选择基于数据采样算法作为运动控制的核心。为了优化控制性能,在插补算法的基础上加入了速度规划算法,使系统冲击小、精度更高。最后,根据贴片机系统实际需求,本设计对双电机伺服系统进行相关实验,记录了系统工作时的波形,包括电流环、速度环、位置环等波形,并根据伺服系统的设计需求对波形和数据进行分析。双电机伺服系统在贴片机 X-Y 轴运动控制上具有明显提升作用,提高速度的同时也提高了精度,因此本设计在贴片机的改造中具有实际运用价值。
关键词:X-Y 轴运动;交流伺服电机;插补算法;速度规划算法;
Abstract
Placement machine is very important in the production line of electronicequipment,which can automatically complete the placement of electronic component.Pick up the patch components by moving the head to the designated position andplace the components on the corresponding PCB board. In recent years, with the rapid development of electronic industry in China and the miniaturization of electronic components and the complexity of circuit boards, the demand for the placementmachine is also getting higher and higher in China. At present, A large number ofsmall and medium-sized electronics company are existed in our country, in the early stage of product research and development , A lot of manpower and material resources were spent in making circuit sample.The research of the placement machine and design of private placement machine is of great importance to electronic company.
In the paper,the placement machine was developed independently in the laboratory.In order to achieve high speed and precise positioning of the X-Y axis,X-Y axis motion control system of placement machine were researched and analyzed, and the control system was designed. Firstly the motion of the X-Y axis was analyzed,including the basic motion and combined motion, in order to select appropriate actuator to achieve various motions and achieve motion control of the X-Y axis.Comparison of asynchronous motor, DC servo motor, AC servo motor ,we chose the AC servo motor as the actuator of X-Y axis. Around the drive model of AC servo motor , The suitable scheme of the motor control program, dual motor control and double motor position feedback was selected.The implementation of specific programs included software design, the software is mainly divided into two aspects: one is the realization of dual motor drive software, including three loop control program of current loop,speed loop and position loop; two is to realize control algorithm of the dual motor linkage.Compare the reference pulse algorithm and algorithm based on data sampling of two kinds of interpolation algorithm,The algorithm based on data sampling was selected as the core of the motion control. In order to optimize the performance of the control system, the speed planning algorithm was added on the basis of the interpolation algorithm, which made the system less impact and higher precision.Finally, according to the actual needs of the placement machine system, the driving servo system of dual motor were tested, the waveform of system was recorded, including the waveform of current loop, speed loop and position loop. And according to the design requirements of the servo, the waveform and data of system were analyzed. The dual motor driving servo system enhance control of X-Y axis motion on the placement machine significantly and improve the speed and the precision, so the design is valuable in practice for transformation of the placement machine.
Key Words:X-Y axis motion;AC servo motor;interpolation algorithm;velocityplanning algorithm;
目 录
第1章 绪论1
1.1 课题研究背景及意义1
1.2 国内外研究现状分析1
1.3 本文的主要内容和结构安排2
第2章 双电机运动控制系统整体方案设计4
2.1 贴片机 X-Y 轴运动控制分析4
2.1.1 X-Y 轴的组成及运动方式4
2.1.2 双电机运动控制系统的设计要求4
2.1.3 双电机伺服系统的总体方案5
2.2 双电机运动控制系统的数学模型和运动控制算法6
2.2.1 伺服电机的选型6
2.2.2 伺服电机驱动的数学模型7
2.2.3 双电机运动控制算法10
2.2.4 速度规划算法12
2.3 本章小结13
第3章 双电机运动控制系统软件设计13
3.1 软件总体框架13
3.2 双电机驱动软件设计14
3.2.1 电流环PI调节器15
3.2.2 速度环PI调节器15
3.2.3 位置环P调节器16
3.2.4 积分改良型PI控制器的设计16
3.3 双电机控制软件设计17
3.3.1 插补算法设计17
3.3.2 速度规划算法设计20
3.4 系统运行状态图23
3.5 中断程序设计23
3.6 本章小结24
第4章 系统的调试与结果分析25
4.1 性能测试及分析25
4.1.1 电机的相电流观测25
4.1.2 电流环测试25
4.1.3 速度环测试26
4.1.4 位置环测试28
4.2 本章小结29
第5章 总结与展望30
5.1 总结30
5.2 展望30
参考文献31
致谢32
第1章 绪论
1.1课题研究背景及意义
运动控制技术一般是指在较为复杂的条件下,将预先设定的方案、规定命令改变成想要的机械运动。在运动控制系统中,处理机械系统通常叫做为轴的一个或者多个坐标上运动和这些运动间的协调运作,牵扯到各个轴上运动速度的调整,用稳定的加减速曲线来进行,和组成精确的定位或者是遵照特有的轨迹等相关的问题。这些较为准确的位置、速度、加速度等一般是经过电动机、驱动器、反馈装置、运动控制器和主控制器来运行。
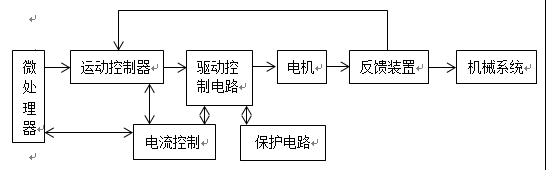 典型的现代运动控制系统的硬件主要由上位机、运动控制器、功率驱动装置、电动机、执行机构和传感器反馈检测装置等部分组成。主要构架如图1.1。
典型的现代运动控制系统的硬件主要由上位机、运动控制器、功率驱动装置、电动机、执行机构和传感器反馈检测装置等部分组成。主要构架如图1.1。
图1.1 运动控制系统
可以看出运动控制器一般是以中央逻辑控制单元为核心,用传感器作信号敏感元件,电机或者是动力装置为控制单位的一种控制装置。主要功能是通过检测运动控制的需求和传感器件的信号来运行必须的逻辑、数学运算,这样可以使电机或者是其它动力和执行装置输出准确的控制信号。



