基于车牌识别系统的行程路线估计的新方法外文翻译资料
2022-10-27 15:31:29
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
Procedia - 社会与行为科学
来自交通运输领域的第13届国际COTA大会(2013 CICTP)的智能化和集成化可持续的多式联运系统程序
基于车牌识别系统的行程路线估计的新方法
摘要
随着车牌识别系统的发展和应用,一种新颖的行程路线的估计方法就被提出来了。通过车牌识别估计车辆行驶路径方法的提出,先用格拉布斯方法消除无效数据,然后通过调查点的OD矩阵进行屏蔽测量点的路线交通分配,然后使用链路流量,以补充和恢复点OD,通过迭代得到调查点之间的最终路径流。最后,通过贝叶斯定理连接的调查点的路线可以得到行程路线。车辆行驶路径是智能交通系统基本数据中的一个,它在流量管理和流量控制中起着重要的作用。据澄城县县公路干线网络分析的实例,这个方法是可行的,所得资料基本符合实际的路径线。
中国海外交通协会(COTA)的负责评审选择通过。
关键词:智能交通系统(ITS);行程路线的估计;交通分配;车牌识别
- 引言
对于许多交通问题,得到车辆行驶路线的信息是非常重要的。车辆行驶路线是交通管理,交通控制和交通组织的基本信息。随着个人交通出行行为和智能交通研究的快速发展,对车辆行驶路线的研究是非常必要的。 Wardrop公司从1990年开始研究车辆行驶路线的选择问题,路线问题得到重视已有100多年的历史。这条路线的估计方法包括:流量分配方法(Daganzo 和 Sheffi,,1977年),探测车的方法,无线网络的方法(卡拉布雷斯,迪洛伦佐,刘和拉蒂,2011),车辆自动识别方法(Jian和Yu,2012)。
近来,随着视频牌照识别系统的发展,此系统越来越多的应用已被广泛使用。基于车辆牌照识别系统上的行程OD和行程路线的研究是非常受欢迎的。CASTILLO E构建了一个调查地点优化的方法(Castillo, Meneacute;ndez,amp; Jimeacute;nez,2008年)。 MINGUEZ R提出了一种在预算约束的情况下选择调查地点的方法(Miacute;nguez,Saacute;nchez - Cambronero,Castillo, amp; Jimeacute;nez,2010)。孙江提出通过使用微粒过滤器,以获得行程OD(Jian和Yu,2012)的方法。
车辆行驶路线和行驶的OD是相互关联的,其中OD为路线的源,路线是OD的表现形式。基于车辆牌照识别系统上的行程OD的研究是非常丰富的,但要获得车辆牌照识别系统中的路线信息仍然存在着许多问题和挑战,这些问题和挑战如下所示:
(1)缺乏对车辆行驶路线的研究,只有M NGUEZř有过一次对车辆行驶路线的研究,通过车辆牌照系统获得调查地点车辆的行驶路径(Miacute;nguez等,2010)。
(2)由于测试环境,安装条件和车辆行驶复杂性的影响。匹配车辆行驶信息的完整路线是非常困难的。如何获得更精确的车辆行驶路线是非常重要的。
(3)受密集的城市路网和投资预算约束的影响,如何获得最佳的车辆行驶路线信息是相当困难的。此文提出的方法从交通分配中获得行程路线,这样就可以从一个小的调查数据中得到尽可能多的行程信息。链接流可以从其他调查方式中获得,这样就保证了数据的准确性。即使使用的是迭代算法,错误仍然可以被发现。
2.基于车牌识别系统的路线估计方法
2.1车牌识别的数据
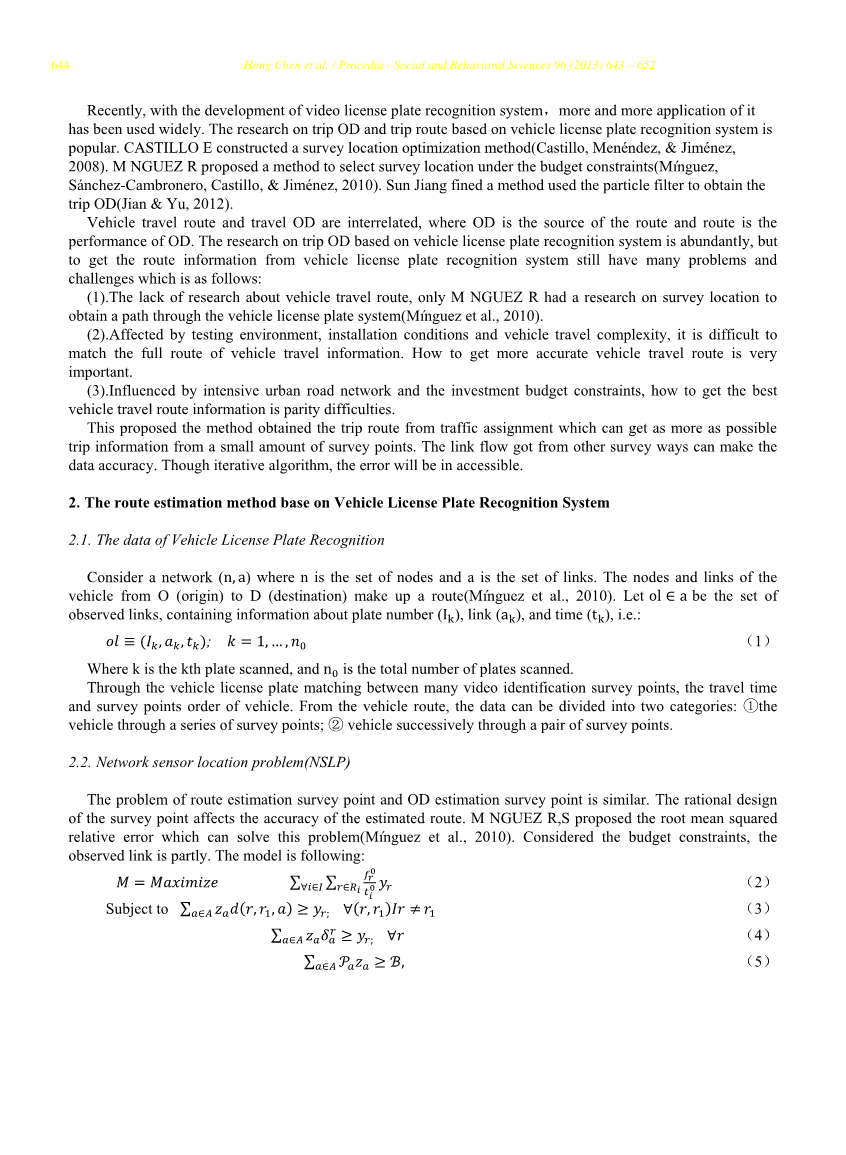
考虑一个网络(n,a),其中n是一组节点,a是一组链接。从O(初始地)到D(目的地)节点的链节构成了一条路线(Miacute;nguez等,2010)。所观察的链接信息包含参数(IK),链路(AK)和时间(TK),即
ol=(Ik,ak,tk);k=1,hellip;,n0 (1)
其中,k是扫描的第k个车牌,n0是扫描的车牌的总数。
通过许多视频识别测量点之间的车辆号牌的匹配,行驶时间和调查点车辆的秩序就能得到了。根据车辆行驶的路线,这些数据可以分为两类:①通过一系列调查点的车辆; ②仅仅通过一对调查点的车辆。
2.2网络传感器的位置问题(NSLP)
路线估计调查点和OD估计调查点的问题是相似的。设计合理的调查点在很大程度上影响着估计的路线的精度。M NGUEZ R,S提出的均方根相对误差的方法可以解决这个问题(Miacute;nguez等人,2010)。考虑到预算的限制,观察到的链接只有一部分。该模型如下:
其中,f0 r是路线流,t0 r是链结流.yr是二进制变量,如果路线r可以与其他路线区分开,则yr为1,否则为0,Za也是一个二进制变量,如果链路a被扫描过了,则Za为1,否则为0。B是可用的预算。
2.3路线估计技术流程
从视频识别技术来获得车辆的路线的检测数据被分成五个步骤,如下图1中所示。
行驶路线
精度要求
No
Yes
图1 基于视频识别系统的车辆路线估计流程图
步骤1 分析视频识别系统的数据。通过车辆牌照的匹配技术,可以通过车辆流量和行驶时间获得通过的车辆的数据。基于初始的行驶时间,误差数据可以通过格鲁布斯数据的方法被
移除。所有调查点组成的调查点相继通过矩阵(OD)。
步骤2进行调查点之间的交通分配先后通过矩阵(OD)。两个调查点之间可能有多条路线,但路线不能包含其他任何调查的链接。通过屏蔽观察到的用户最佳分配方法的链路流量,能够得到在两个测量点之间的通信流量和行驶时间。
步骤3 验证链路流量。通过把此方法获得的链路流量与其他调查方法获得的链路流量相比较,看他们是否符合精度要求,如果为true,然后就进行下一步;否则,使用由其他调查方法获得的链路流量来恢复调查点的OD。
步骤4 路线的估计结果。对于第一种类型的数据,路线可能在两次调查点之间,可以通过路线流量来确定。对于第二种类型的数据,可以通过连接的调查点的路线的贝叶斯原理得到行程路线。
2.4 消除无效的数据
由于车牌识别设备故障和车辆行驶路径的复杂性,一些匹配的数据是无效的错误的,并需要被去除。我们使用格拉布斯统计的方法消除无效的数据。其实质就是给一个置信的因素,并找到相应的置信区间。其标准是只要数据落在置信区间之外;它就可以被视为无效的车辆牌照的数据,并从一系列测量方法中(Jibiao,2012)除去。该算法描述如下:
步骤1 计算样本均值
(6)
步骤2 计算样本标准差
(7)
步骤3 消除无效数据
把与2s相比较,如果大于2s即去掉此数据。然后根据检测值的数量和给定的显著水平alpha;(一般来说alpha;=0.05)。格拉布斯统计的阈值T(n,alpha;)可以通过查表法进行检测,然后将其与统计值T比较。按照小概率事件不会发生的原则,并且在符合高斯分布没有出现的情况下,如果,我们可以考虑该统计变量T的分布存在显著差异n,那么这就是包含错误的数据,应被消除。
(8)
步骤4 重复上述三个步骤,直到所有的测量数据都满足标准。
2.5 被屏蔽的观察链路的交通分配
对调查点的OD交通分配可以得到流动路线和路线的行驶时间。当车辆已成功通过两个观测点(R,S),该车辆不再经过道路上的任何其他测量点。因此,应分配屏蔽观察链接。例如,(R,S)的路由ķ包括观察到的链结a,那么k的路线流动就应该为空。本文使用的用户平衡是由Wardrop公司(Wardrop公司,1900)提出的。当达到平衡时,所有使用的路由具有最小的且相等的电阻,其它的路线有较大的相等的电阻。计算使用贝克曼模型(Daganzo&谢菲,1977),并对它的模型加以了修改,被修改的公式如下所示:
其中ta(w)是链结a的可变电阻函数,qrs是介于(R,S)之间的外径流,frs k是(R,S)的第k个流,xa是链接a的流量,delta;rs a,k是链路的相关变量,xi;r,s a,k是屏蔽观测链路的变量。delta;rs a,k 是一个二进制变量,如果(R,S)的链接a在第k条路径上,则为1,否则为0。 xi;r,s a,k也是一个二进制变量,如果链结a不属于ol,则为1,否则为0。
2.6补充和恢复观测点OD
车牌识别技术会丢失一些数据;那些不能匹配的车牌数据将被删除,当消除无效数据时也可能丢失一些有效的数据,所以,补充和恢复调查点的OD是很有必要的。
通过从其他调查方式中获得的其他的链路流量fa来恢复调查点的OD。理想情况下,链结a等于所有路线流量的总和,其中包括链结a的流量。所以,得到下述式子。
其中fa是用其他观测方法得到的链接a的交通流量,tr,s a,k是可以由frs k/sum;k frs选择的路线因子,这个路线因子应取保守值,让其迭代收敛。使用新的qrs更新观测点的OD,观测点的OD会更加符合实际。
2.7 路线估计
通过交通分配和OD的数据恢复,可以得到车辆选择两个点之间的路径的概率。当车辆仅通过两个观测链路(R,S),这种车辆选择路径的概率可以通过该路由流量来确定。如果车辆经过了三个以上的观察结点,需要联系调查点的路线才能得到车辆的行驶路线。使用贝叶斯定理来连接的测量点的路线,路线选择的概率就可以得到。贝叶斯定理:假设有事件包括A1,A2,...,An,一个完整的合集,一个事件的出现是另一个事件出现的一个必要条件,以贝叶斯事件的后验概率定理(Jibiao,2012;桑切斯 - Cambronero,卡斯蒂略,梅嫩德斯,与希门尼斯,2011年)可以表示为:
其中,P(Ai)是事件Ai的先验概率,这是已知的条件,P(B|Ai)是在事件Ai发生的条件下事件B发生的概率, P(Ai) P(B|Ai)是事件Ai和事件B发生的联合概率, P(Ai|B) 是在事件B已发生的条件下,事件Ai发生的后验概率,这也可以被称为校正概率。
对于路线估计,车辆通过观察链路r1,r2,hellip;,rn。记路线P发生为事件B,路线P由路线p1,p2,hellip;,pn-1合成,pi是介于ri和ri 1之间的路线,p1,p2,hellip;,pn-1分别记为事件A1,A2,...,An贝叶斯定理最终可以得到在研究道路网络中车辆选择路线的概率。
3 现实举例:澄城网络
为了了解和测试所提出的方法的可行性,我们采取渭南澄城县的主干公路网络拓扑结构为例,如图2所示其中包括有11个节点和34个双向链路。实际道路网络如图3所示。.我们使用车牌识别系统来估计澄城车辆行程路线,主要计算步骤如下:
图2澄城县主干道拓扑网络图 图3澄城县的实际主干路网
步骤1 考虑到网络传感器位置的问题,选择被观测的链接对路线估计来说非常重要。如果所有的行程路线都被需要,各个链接结点都应该观测到。由于资金限制,在均方根相对误差模型中,可以设置8个调查点。观察到的链接是OL={1,2,19,20,21,22,33,34}。
步骤2 有用的数据是高峰时间车辆牌照的数据。使用车辆牌照匹配技术,可以得到观察点的初步矩阵的OD。通过消除无效数据,迭代之前的矩阵的OD被得到,如表1所示。
表1迭代前的观察点的矩阵的OD 表2迭代后的观察点的矩阵的OD
步骤 3 用被屏蔽的观测点的交通分配连接观测点的矩阵OD,路由流量就得到了。
步骤4 通过比较从交通分配得到的流量与从检测圈得到的链路流量,如果不能满足精度,OD矩阵需要补充和恢复。经过四次迭代,观测点的矩阵OD就能得到了,如表2所示。
步骤 5 通过迭代后的观测点的矩阵OD的交通分配,观测点的路线流就得到了。观测点的路线流程图如图3所示。最后,使用贝叶斯定理确定车辆的行程路线,行程估计结果就得到了,如表3所示。所得到的值与实际情况相符。
图3 澄城观测点的路线流
4 结论
随着基于车牌识别系统的车辆路线估计方法的逐步应用,实际需求也逐步提高。该方法已用于澄城县主干道网络上进行测试。本文的主要结论如下:
1.获取行程的路线信息对了解车辆行驶的行为具有重要的意义。 它对于交通组织和管理具有现实意义。视频车牌识别系统可以获取路线估计丰富的信息。因此,本文提出的方法具有实际意义。
2.观测点的选择对路线估计结果有重要的影响,观测点的位置和数量会直接
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[153326],资料为PDF文档或Word文档,PDF文档可免费转换为Word



