汽车行驶数据分析及识别系统设计毕业论文
2020-02-17 23:05:59
摘 要
工业化4.0时代已经到来,与之同时国内经济也在飞速发展,这两个因素使得我国汽车拥有量大幅度上升。汽车作为人们出行以及运输的主要工具,其安全性关乎着人们的生命和财产安全。为了预防交通事故的发生、减少交通出行问题,本文针对行车状态中最为重要的驾驶行为进行了深入的研究。本文利用MATLAB工具平台构建算法,通过OBD设备终端获取原始数据,使用算法对数据进行深度分析,识别出数据中的异常驾驶行为,最终利用支持向量机构建异常行车状态识别模型。主要内容如下:
- 详细介绍了OBD设备终端,并使用其获取了车速、转速等实时车辆信息,最后将数据导入数据库。
- 根据实际行车状况,设计了可以识别出超速、急加速、急减速、急刹车、发动机转速异常等不良驾驶行为的算法。
- 提取了四项特征参数,利用熵值法计算出各项参数的权重占比,进行了特征加权处理。
- 基于特征加权以及支持向量机构建了异常行车状态识别模型,并运用实际数据进行了分析辨证。
实验证明了该模型的有效性,通过正确识别不良行车状态,能够减少可能的驾驶安全隐患。
关键词:异常驾驶行为;识别算法;特征参数;SVM
ABSTRACT
The Industry4.0 has arrived, and at the same time, the domestic economy is also developing rapidly. These two factors make the car ownership of our country increase substantially. As the main means of people's travel and transportation, the safety of automobiles is related to people's life and property safety. In order to prevent the occurrence of traffic accidents and reduce the problem of traffic trip, the most important driving behavior in driving state is deeply studied in this paper. In this paper, we use the MATLAB tool platform to construct the algorithm, get the original data through the OBD device terminal, use the algorithm to conduct in-depth analysis of the data, identify the abnormal driving behavior in the data, and finally use the support vector machine to build the abnormal driving state recognition model. The main contents are as follows:
(1) The OBD terminal is introduced in detail, and real-time vehicle information such as speed and speed is obtained by using it. Finally, the data is imported into the database.
(2) According to the actual driving conditions, an algorithm is designed to identify the bad driving behaviors such as overspeed, acceleration, deceleration, braking and abnormal engine speed.
(3) Four feature parameters are extracted, and the weight proportion of each parameter is calculated by using the entropy method, and the feature weighting is processed.
(4) Based on feature weighting and support vector machine (SVM), an abnormal traffic condition recognition model is built, and the actual data are used to analyze and differentiate.
The experiment proves the validity of the model, and it can reduce the potential driving safety hazard by correctly identifying the bad driving condition.
Key words: abnormal driving behavior;recognition algorithm; feature parameters;SVM
目录
摘要 I
ABSTRACT II
目录 III
第一章 绪论 1
1.1研究背景及意义 1
1.1.1研究背景 1
1.1.2 研究意义 1
1.2 国内外研究现状 2
1.2.1 行车数据采集系统研究现状 2
1.22 驾驶行为建模研究现状 2
1.3 主要研究内容和章节安排 3
1.3.1主要研究内容 3
1.3.2 论文章节安排 3
第二章 行车数据获取与预处理 5
2.1 OBD设备终端介绍 5
2.2 实际采集过程 6
2.3原始数据获取 7
2.4 导入数据库 7
2.5 matlab连接数据库 8
2.6 本章小结 9
第三章 异常驾驶行为识别 10
3.1 异常驾驶行为 10
3.2 异常驾驶行为算法 10
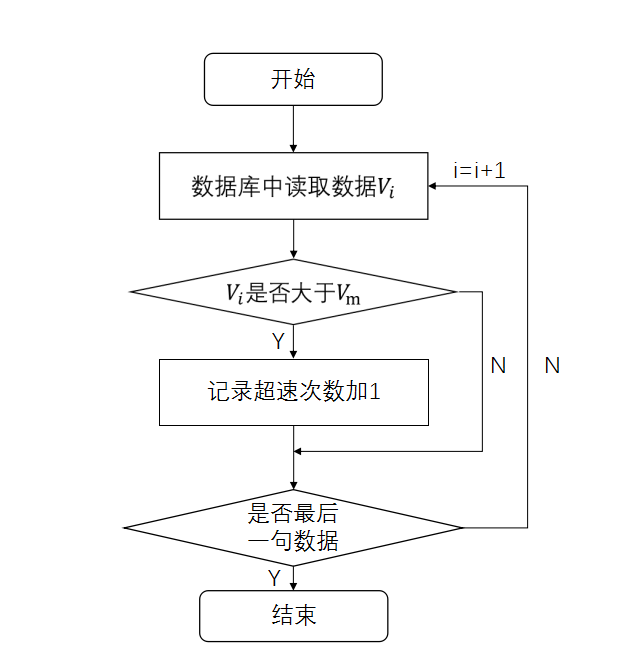
3.2.1 超速识别算法 10
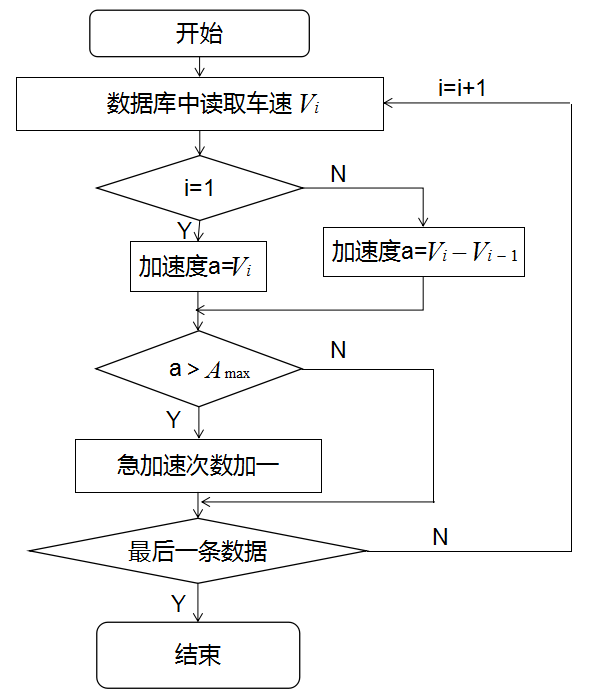
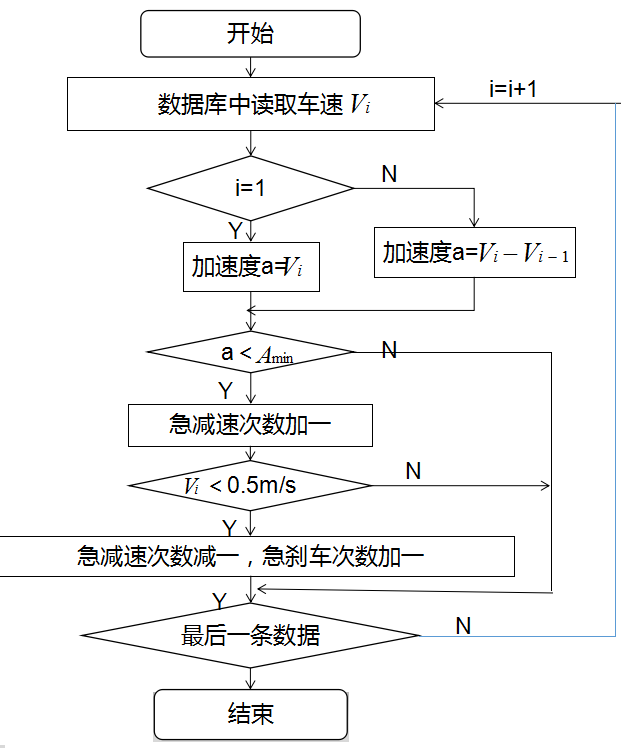
3.2.2 急变速识别算法 11
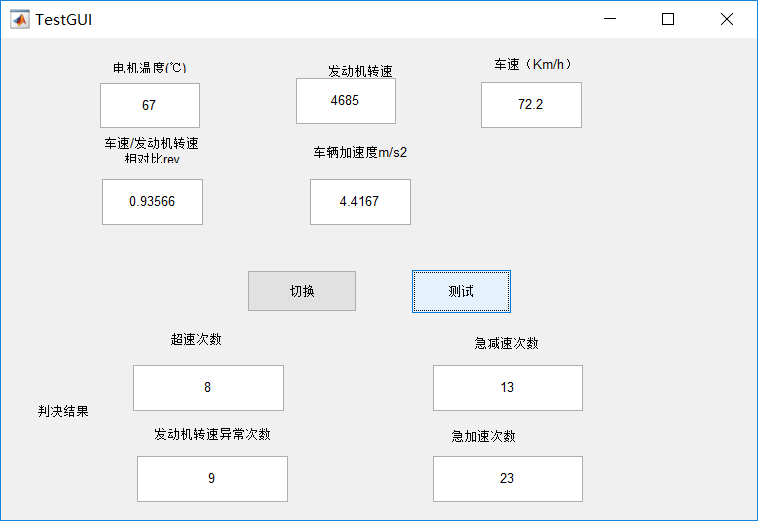
3.3 算法测试 14
3.4 本章小结 16
第四章 基于特征加权的支持向量机 17
4.1 特征参数选取 17
4.2 特征加权 17
4.2.1 熵权法分析权重 17
4.2.2 特征加权计算 20
4.3 支持向量机简介 20
4.3.1 线性可分SVM 21
4.3.2 线性不可分SVM 22
4.3.3 非线性SVM 23
4.4 基于特征加权SVM的行车状态识别 23
4.4.1 行车状态识别模型构建 23
4.4.2 结果分析 24
4.5 本章小结 25
第五章 总结与展望 26
5.1 总结 26
5.2 展望 26
参考文献 27
附录A 28
致谢 29
第一章 绪论
1.1研究背景及意义
1.1.1研究背景
随着工业4.0汽车智能时代的到来,我们国家的汽车拥有量急速上升,生活便利提升的同时也带来了很多交通问题。汽车作为当前使用最频繁的代步以及运输工具,在我们工作和生活中都扮演着不可替代的重要角色。作为人口大国的我们,已逐步成为汽车大国。根据交管局最新消息,我国机动车驾驶人正式冲破4万万人关卡,达4.09万万人,其中汽车驾驶人3.69万万人,截至2018年底,全国汽车拥有量达2.4万万辆,比2017年增加2285万辆,增长了百分之十。小型载客汽车拥有量达2.01万万辆,首次突破2万万辆,比2017年增加2085万辆,增长了百分之十一,是汽车保有量增长的主要组成部分;私家车持续快速增长,2018年登记拥有量达1.89万万辆,近五年年均增长近2000万辆;载货汽车拥有量达2570万辆,近一年新注册登记326万辆,再创历史新高。汽车的拥有量上升趋势已经不可阻挡,为了减少交通事故的发生,规范驾驶员的驾驶行为习惯已经得到了越来越多的重视。
驾驶行为是指驾驶员通过听觉和视觉等感觉器官,通过大脑分析,感知周围持续变化的道路、车辆、交通信号和其他交通状况所形成的物理行为[1]。这些物理行为通常包括改变车速、改变车头方向、停车等。长期错误驾驶行为所形成的错误驾驶习惯,会使得驾驶员遇到特殊情况时,会对车辆形成操作错误,出现超速、急加减速等危险行为,从而导致交通事故的发生。
目前大数据和物联网正处于高速发展的期间,这为我们的工作生活带来了更多便利的同时,也为车辆驾驶研究领域指出了新道路。本文中详细阐述了行车信息的采集方案,并通过MATLAB和svm(支持向量机)对评估模型进行了深入研究,设计了一款行车状态评估系统。旨在提升行车安全性,降低交通事故发生概率。
1.1.2 研究意义
(1)减少交通事故的发生。行车状态研究能及时判断驾驶员的行为,对不安全的驾驶行为进行预警,及时提醒驾驶员车辆信息以及不当的驾驶行为,从而减少交通事故的发生。
(2)为保险行业提供参考。传统的车辆保险理赔只关注了车辆本身信息这一层面,本文中的实验额外提供了驾驶员层面。分析了驾驶途中的平均车速,急加减速行为等,减少了保险事故纠纷。
(3)为自动驾驶提供数据参考。本文中对行车数据进行了系统的分析运算,针对不同驾驶行为产生了不同的数据分析结果,结合深度学习技术将对自动驾驶提供很大的参考意义
1.2 国内外研究现状
随着自动驾驶,交通智能系统等研究的深入,国内关于行车状态的研究逐渐成为关注要点。结合目前的机器学习算法来讲,现有的行车状态方向研究主要基于以下两个方向:
(1)基于图像处理技术。此方法主要依赖于摄像头进行,研究成本较高,后期处理难度较大[2]。
(2)基于数据传感器检测。通过车载或者移动智能终端等传感器获取车辆数据,相较于第一种来讲,成本较低,但与驾驶员以及周围环境的联动较低[3]。
1.2.1 行车数据采集系统研究现状
国外相较而言起步较早,研究更为全面。例如Chuang-Wen You等人就设计了一款名为Carsafe的手机应用,其主要利用手机自身的双摄像头来获得道路状况和驾驶员操作行为等信息,进而分析是否存在不良驾驶行为。Chaczko Z, Jiang F, Ahmed B等人使用了一种有效的方法来识别摩托车,并在摩托车行驶半径为20米时提醒其他驾驶员[4]。同时,国外还存在很多利用卫星定位数据来对行车状态进行研究,例如Mohd. Alauddin Mohd. Ali等人通过车载卫星GPS数据来分析车辆行驶方向及其他相关研究,从而识别异常驾驶行为,但目前国内已经上线了动态监控平台,且卫星定位数据对于数据深度挖掘不够,动态数据分析不够全面,对采集数据的分析能力不足,所以不具备实用性。
国内方面的研究则主要还是基于数据传感器进行研究。封宇华等人通过OBD系统获取行车数据,利用安卓手机作为接收处理数据的终端,使用WiFi模块进行数据传输[5]。段永成等人开发了一款基于安卓系统的行车记录仪 [6]。厦门雅迅公司则开发了一款基于加速度传感器,对车辆急加速、急减速等行为进行远程监控的软件[7]。从玉华、胡行涛等人设计了一款基于安卓手机具备行车记录、行车导航、图像监控等功能的智能监控系统[8]。
1.22 驾驶行为建模研究现状
国外很多学者已经对驾驶行为数据进行建模研究分析,他们从各个方面出发。例如Yoshifumi Kishimoto 和Koji Oguri 根据驾驶员某个时间段的车辆数据,通过隐马尔科夫模型算法建模进行自动识别,驾驶员是否踩刹车。Zhou Tong,Sun Dihua等人则考虑了单车道公路上汽车行驶行为的先验性,提出了一种新的汽车跟驰模型[9]。Chiyomi Miyajima等人采集了驾驶员脚踏板数据,运用高斯混合算法进行建模,从而识别驾驶员的急加减速行为,该模型的准确率大致为80%。国内学者张志鸿则建立了基于AEW-AHP的驾驶行为评分模型对实例进行评分分析 [10]。
1.3 主要研究内容和章节安排
1.3.1主要研究内容
本课题主要是基于OBD设备终端获取行车数据来对异常驾驶行为进行识别。研究的主要内容包括异常驾驶行为识别算法和行车状态识别等多个方面。本文中主要利用OBD设备终端采集得到车辆行进过程中的数据信息,进行数据预处理后,通过驾驶行为评价指标以及数据算法,对数据进行分析,识别出其中超速、急加减速、发动机转速异常等不良驾驶行为。再进行特征参数提取,利用熵权法分析特征参数权重,进行特征加权,构建特征加权支持向量机,构建行车状态识别模型,识别不良行车状态。
1.3.2 论文章节安排
文章分为6章,其结构如下:
第1章:绪论。本章节主要介绍了本文的研究背景和意义,并分别从行车数据采集和驾驶行为建模介绍了国内外研究现状,还介绍了本文的主要研究内容。
第2章:数据采集及预处理。本章节介绍了OBD设备终端的主要功能和核心组件,构建了数据库,将数据传输到数据库中,并使用了MATLAB工具平台连接数据库。
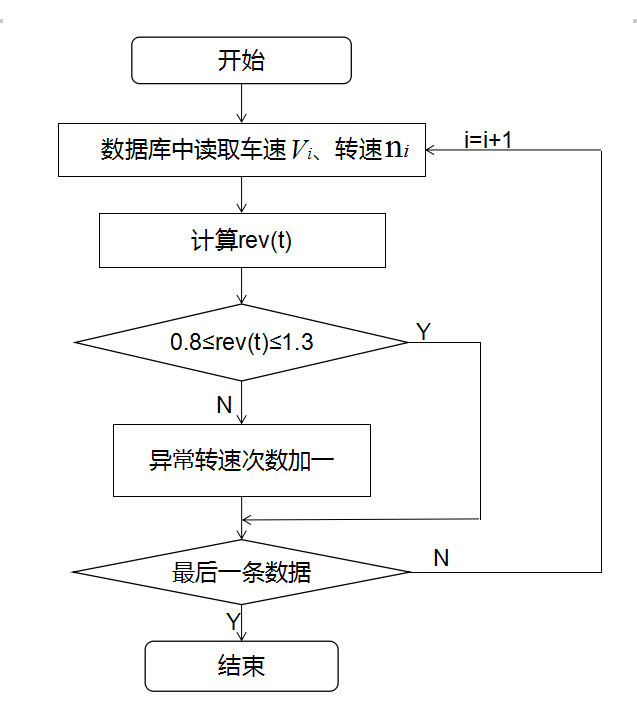
第3章:异常驾驶行为识别算法。本章节根据获得数据分别设计了超速,急加速行为、急减速刹车行为、发动机转速不匹配的识别算法。
第4章:基于支持向量机的行车状态识别模型。本章节详细介绍了支持向量机以及在MATLAB平台进行模型训练和测试的过程。
第5章:结论与展望。本章节总结了本文所有工作内容以及对未来工作内容的展望。
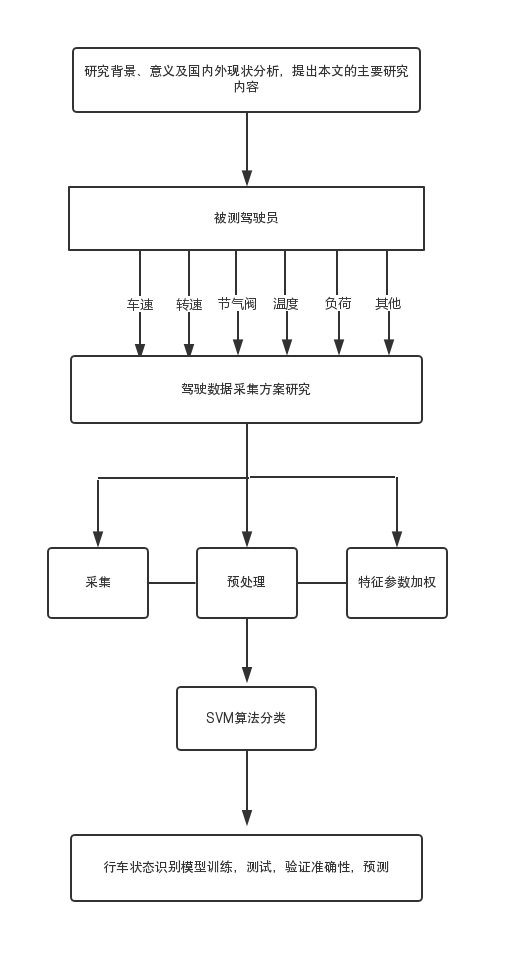
图1.1 技术路线图
行车数据获取与预处理
2.1 OBD设备终端介绍
汽车驾驶数据获取一般有自然驾驶数据、仿真衍生数据等[11]。自然驾驶数据的获得目前来讲有三种方法,前装、后装和智能手机APP。前装指的是车辆出厂前由厂商主动添加;后装指通过OBD(On-Broad Diagnostic车载自诊断系统)设备终端对车辆信息采集[12];智能手机app则是利用手机作为传感器从而进行数据采集。前装方式的采集虽然较为方便,但由于厂商对于数据的保护,使得成本较高,而智能手机app采集到的信息往往不完整,所以本文中采用后装方式采集数据,通过设备连接车内CAN总线采集获得数据。
OBD系统能够随时监控发动机和其他模板的工作状况,当出现车辆行驶状况异常的时候,点亮仪表盘上警示灯,并将故障信息存储,采用一定的方法可以将故障码读出[13]。
本文采用了基于CAN总线和GPRS无线网络的行车数据采集系统。它主要包含三个模块:数据转换模块、触摸屏模块以及GPRS网络模块。该系统通过这三个模块基本完成了行车数据采集以及上传功能。图2.1为该系统框架:
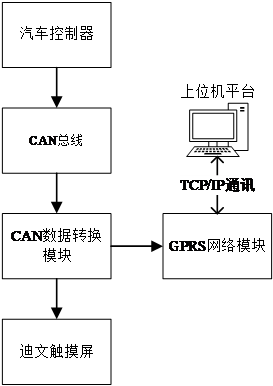
图2.1 行车数据采集系统框架
数据转换模块主要包括七个部分:CAN总线接口模块、微控制器及其接口模块、数据缓存器及其接口模块、开关信号输入输出模块、串口电平转换及其选择模块、报警提示模块、电源模块,如图2.2所示。其具体电路图见附录A。
由于行车采集系统本身性能及资源的限制,使得我们无法直接在系统上对数据进行二次分析,只能进行数据采集与缓存。因此数据采集后需要通过GPRS网络模块上传到上位机平台进行数据处理。本系统GPRS网络模块采用了基于兴讯通公司开发的SIM808芯片的四频通讯模块,该模块可以在低功耗的情况下实现GPRS数据的传输。该模块工作流程图如图2.3所示。要进行数据的网络传输,可以选择获取固定的IP地址,然后通过路由器设置一个端口映射关系实现通信。
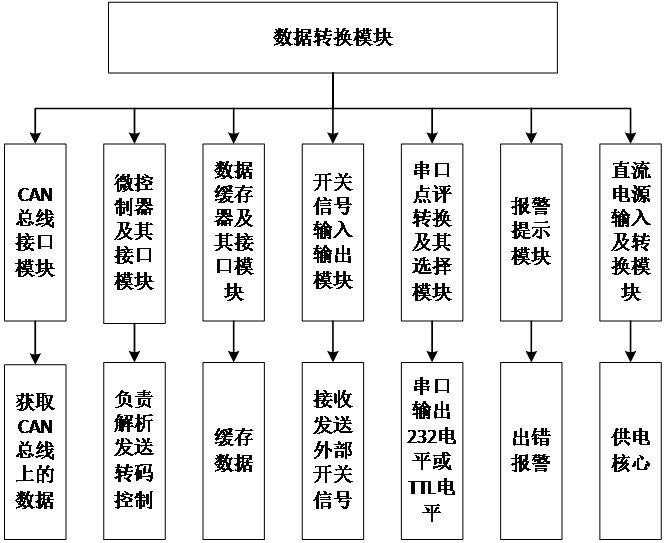
图2.2数据转换模块框架
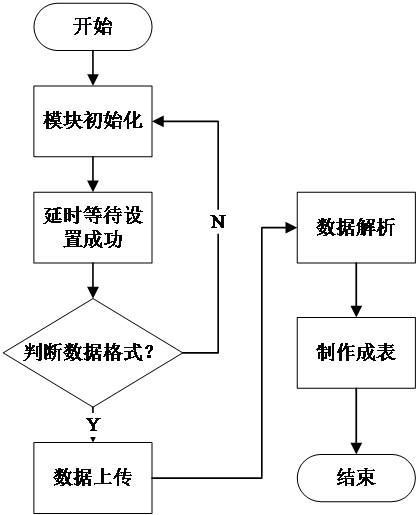
图2.3 GPRS网络模块工作流程图
2.2 实际采集过程
本次数据采集地点位于武汉理工大学鉴湖校区附近路段,图2.4为实际采集过程:
 图2.4 实际采集过程
图2.4 实际采集过程
2.3原始数据获取
OBD数据模块获取的数据可分为数值参数和状态参数,状态参数只有开关两种状态,通常用来表示电控开关等。数值参数则是指具有一定单位的数据,例如车速、发动机温度等。本文设计的行车状态识别系统主要涉及数值参数,所以不读取状态参数。获取部分原始数据如图2.5所示:
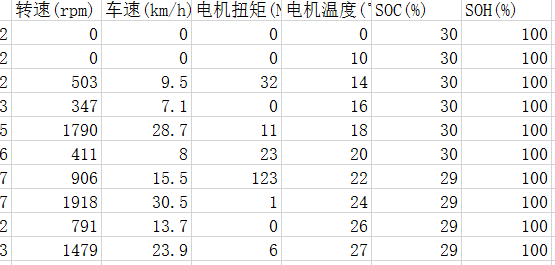
图2.5 采集获得部分原始数据
2.4 导入数据库
本文中使用的OBD设备终端采集信息后会生成一份txt文件,只需要将这份文件导入数据库中即可生成车辆行驶信息数据库。本文使用的数据库软件为SQL server2012,只需要选择向数据库中导入平面文件即可。具体操作如图2.6所示:
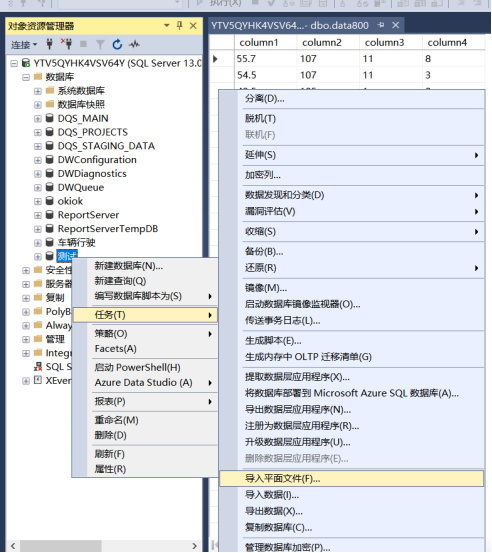
图2.6 信息导入数据库
2.5 matlab连接数据库
本文中使用的算法开发软件为matlab2018a。matlab连接数据库主要通过ODBC和JDBC两种方法。本文中使用ODBC(开放数据库互连)调用数据库。其是微软公司开放服务结构中一个重要组成部分。它建立了一组使用规范,并依照此提供了一组标准api,从而用户便可以直接访问SQL Server。通过ODBC直接操作数据库不需要依赖其他任何DBMS,所有的数据库均可以使用ODBC进行访问,这也是它的最大优点。ODBC运用层次法来对数据库进行管理,在每一层可能出现不一致的地方,ODBC都选择引入一个公共接口,这很好地解决了数据库相关应用程序的独立性问题。
Matlab连接数据库前需要现将SQL server服务器身份修改为SQL Server和Windows双重身份验证模式。配置好ODBC数据源之后,可通过matlab代码读取数据库数据。具体代码如图2.7所示:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![[Y]`MLCY{O_ON{~19WN3_%F](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9579_202021723556777.png)