语音驱动的运动机器人设计毕业论文
2020-02-17 23:06:01
摘 要
在科技快速发展的现在社会中,机器人已经成为了一个热门的话题,不管是本课题所谈到的语音控制机器人的运动,还是更深层次的人工智能AI,都是人工智能革命中的核心推动力量。
本课题通过语音驱动来控制机器人,操作者可以基于语音与机器人进行互动,机器人具有自己的一套思考模式,而不仅仅只是完成一些重复性的固定的任务,能识别接收到的语音,并根据接收到的语音做出相应的反应,实现互动,从而具备一定的智能。由于该系统涉及复杂的语音识别及机器人运动控制技术,因此具有相当的理论和应用研究价值。
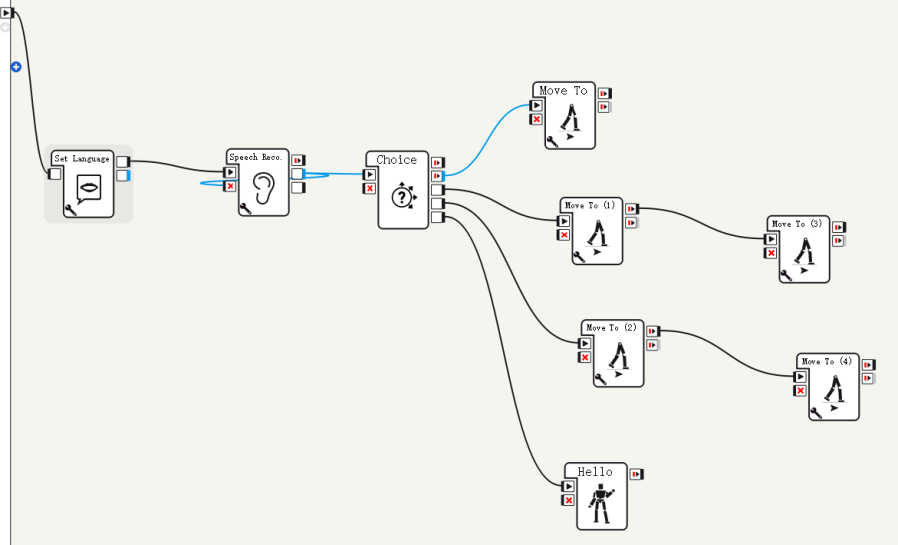
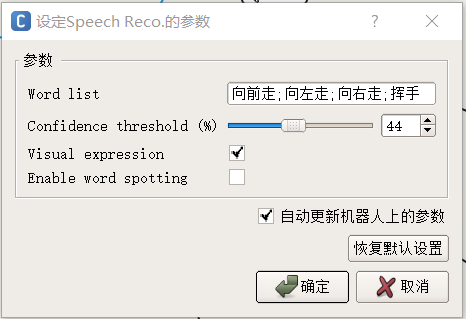
本文首先介绍了机器人的发展历史以及本课题使用的NAO机器人概况,并且简要描述了语音识别技术的基本理论,其后基于choregraphe软件进行相关的算法设计及编程。构建状态网络之后,对NAO机器人进行语音输入,根据不同的语音输入来控制NAO机器人的动作;NAO机器人在接收到指令之后,采用DTW算法,对人的指令进行理解,并根据理解的命令进行相应的运动。
实验证明,该系统中,NAO机器人可以正确地理解人的指令,准确地完成相关动作,实现人机交互。
关键词:NAO机器人;语音识别 ;DTW算法。
Abstract
In the current society with rapid development of science and technology, robots have become a hot topic. Whether it is the movement of voice-controlled robots mentioned in this topic or the deeper artificial intelligence AI, it is the core driving force in the artificial intelligence revolution. .
This topic controls the robot through voice drive. The operator can interact with the robot based on the voice. The robot has its own set of thinking modes, not just complete some repetitive fixed tasks, can recognize the received voice, and according to The received voice responds accordingly and realizes interaction, thus providing certain intelligence. Because the system involves complex speech recognition and robot motion control technology, it has considerable theoretical and applied research value.
This paper first introduces the development history of robots and the overview of NAO robots used in this topic, and briefly describes the basic theory of speech recognition technology, and then based on choregraphe software for related algorithm design and programming. After constructing the state network, the NAO robot is voice input, and the NAO robot's action is controlled according to different voice inputs. After receiving the instruction, the NAO robot uses the DTW algorithm to understand the human command and correspondingly according to the understood command. exercise.
Experiments show that in this system, NAO robot can correctly understand human instructions, accurately complete related actions, and realize human-computer interaction.
Keywords:NAO robot ;speech recognition; DTW algorithm.
目 录
摘要 I
第一章 绪论 1
1.1 研究背景和意义 1
1.2 国内外研究现状 2
1.3 本文研究内容 3
1.4 论文结构 3
第二章 NAO机器人原理 5
2.1 机器人发展历史 5
2.2 NAO机器人介绍 6
2.3 NAO机器人开发现状 7
2.4 NAO机器人动作执行 8
2.5 本章小结 10
第三章 语音识别开发与实现 11
3.1 语音识别发展 11
3.2 隐马尔可夫模型 11
3.3 隐马尔可夫模型在语音识别中的应用 13
3.4 语音特征参数 14
3.5 声学模型 15
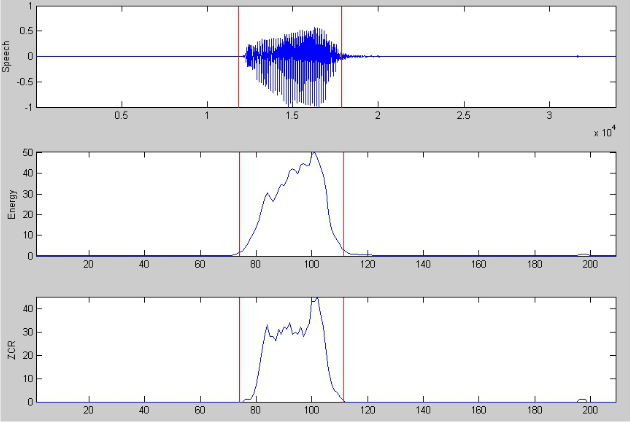
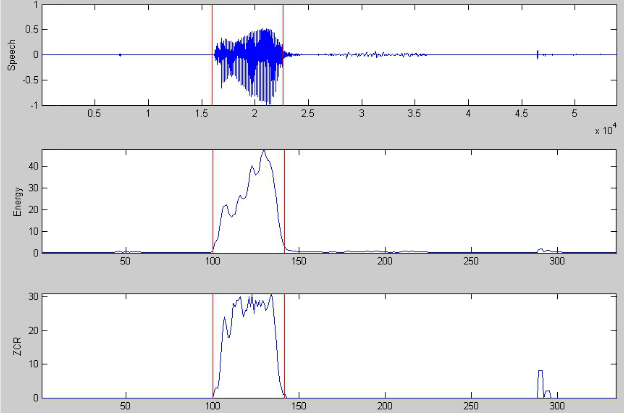
3.6 机器人的语音识别实现 15
3.7 本章小结 19
第四章 基于Choregraphe的编程实现 20
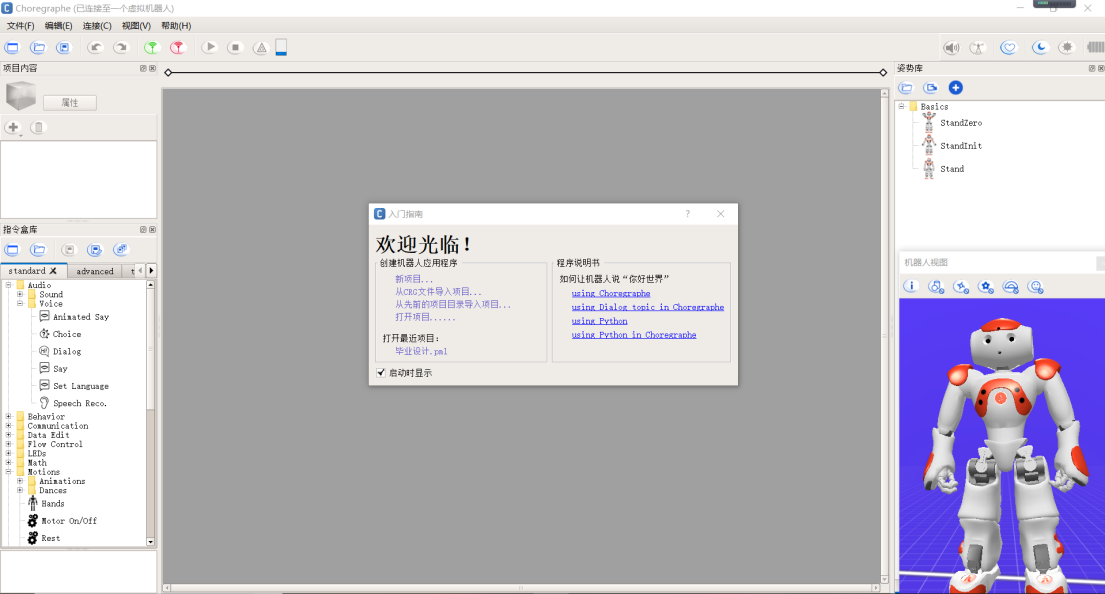
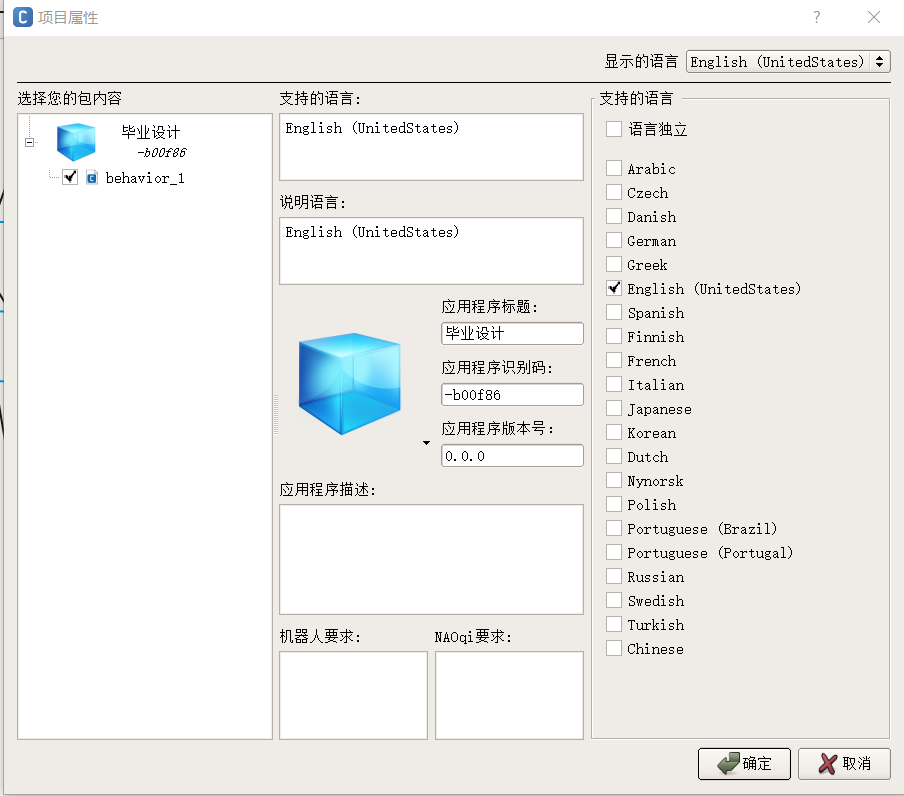
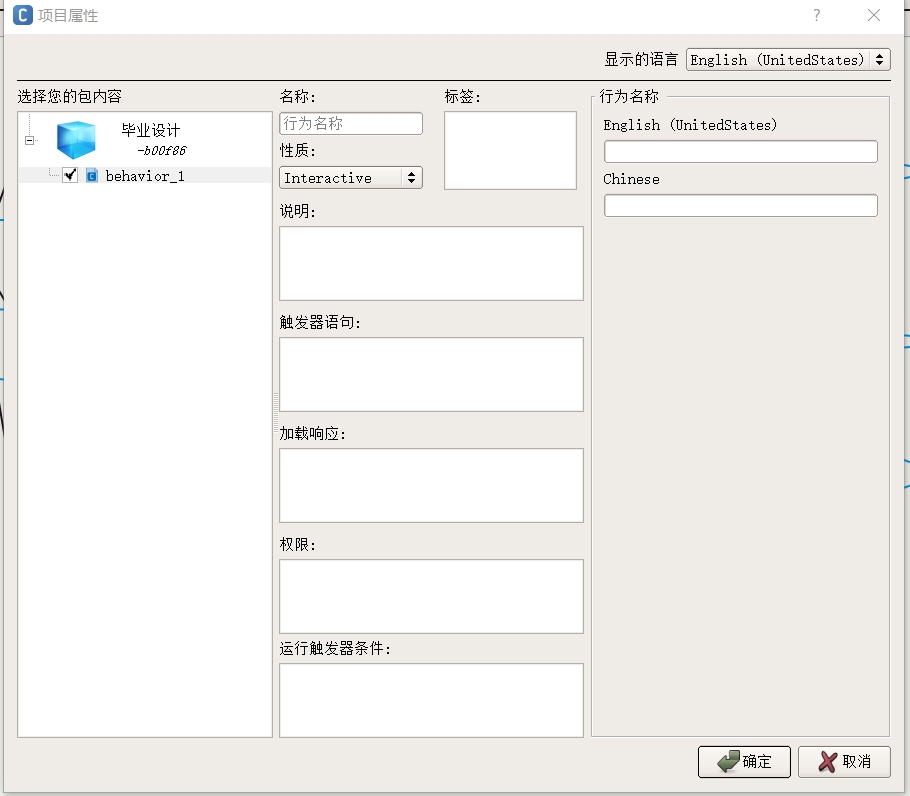
4.1 choregrephe软件简介 20
4.2 语音驱动机器人 22
4.3 本章小结 25
第五章 实验及结果分析 26
5.1 实验结果 26
5.2 本章小结 29
第六章 总结与展望 30
6.1 总结 30
6.2 展望 30
参考文献 32
附录 33
致谢 39
绪论
1.1 研究背景和意义
不管是语音识别还是机器人,都已经拥有了几十年的发展历史,特别是伴随着计算机科学的高度进步和通信学科的茁壮发展,语音识别技术中一直都有新鲜的血液涌入,同时语音识别具有着一些巨大的难点,例如不同人说话的语气还有一些单词具有着相同的发音,比如在英语里too和two的发音是一样的,而二者代表的意思却是天差地别。因此使用了隐马尔可夫模型来构造声学模型和随机语言模型,通过大量的数据训练,来得出当前语境下与之更匹配可能性更大的单词[1]。
而目前的语音识别技术的发展,更加贴近了生活,以前的语音识别是属于朗读式的语音,要求被识别的人说话字正腔圆,发音标准,否则识别率会大打折扣,而现在的语音识别追求的则是真实生活中的对话也能够准确的识别,也就是说,不管是发音标准的人,还是发音带着地方口音的人,他们说的话都能够被准确地识别出来,因为汉语的语音识别的音素涉及到平仄问题,这点在后文会进行讨论,所以汉语的语音识别是相对于英语来说比较复杂的,而目前的研究则是着重于这个方面,还有就是对于环境中噪声等干扰因素的减弱甚至是排除,因为目前的识别率的数据基本都是在理想的无噪声环境下进行的测试,而产品终归要应用到日常生活中,所以必须要适应真实的带有噪声的日常生活环境,这是目前要做出的突破点[2]。
在目前的市场上,NAO机器人作为国内外学术研究运用最广泛的机器人受到了普遍的关注。机器人是一个很好的软件与硬件结合的例子,用硬件搭建底层,再用编程语言去控制机器人的行为。语音识别也是目前实体机器人与虚拟机器人的一个热门研究方向,让机器人可以“听懂”人类的语言,并且作出反应与人类互动。本文以NAO机器人作为平台,以choregraphe作为编程软件,实现语音驱动的机器人,通过语音控制机器人的运动,完成行走与挥手等动作。
本次毕业设计的特点就是要结合底层的硬件和上层的软件,来完成需求,这与本专业的软件和硬件结合的特点是一致的。希望可以通过本次毕业设计,来更好地理解深度学习,实践理论知识,在设计的过程中不断学习进步,完成本次课题。
机器人作为新一代人工智能革命的核心研究方向,对于我国在本世纪的科研具有非同一般的意义[3]。我国目前在尖端科学技术的竞争力上还是略显薄弱的,而当前世界环境下,科学技术的发展是一个国家具有竞争力和话语权的必要条件,虽然我国对于语音识别的研究还是走在世界前沿的,但在机器人方面却不尽人意,本文研究的语音驱动控制的运动机器人也将是需要着重发展的一方面,实现人机互动,是往更加智能化的人工智能发展的必经之路,为机器人方面的研究作为一个铺垫,抛砖引玉,在机器人方面更深入的研究还需要我辈青年努力,本文研究的意义也会是深远的。
1.2 国内外研究现状
语音识别听写机的应用被美国相关人士评价为1997年计算机领域十个重点的发展方向之一,在二十一世纪开始的一段时间里,语音识别技术都是信息技术领域里的领头羊。
而我国的语音识别研究源起于上世纪的五十年代,在最近的几年里,发展十分迅速,语音识别开始的时候是实验室的研究项目,离人们的日常生活较远,而在随后的发展里,语音识别逐渐进入了人们的日常生活里,自从863计划执行之后,语音识别技术就有了专门的科学家成立项目组进行研究。在我们国家的语音识别的研究里,汉语自然是着重发展的对象,我国的汉语语音识别技术自然是走在世界前沿的,清华大学的电子工程系,所研发出来的用于汉语语音识别的芯片,对于不是特定人士连续输入语音的识别率,已经可以达到百分之九十四点八,是目前为止,国际上最为优异的识别的结果之一。
人工智能也是本世纪最尖端的一门技术,机器人更是人工智能的研究里,非常具有潜力和市场的一个发展方向[4]。近年来,机器人在各个领域中都大放光彩,不论是教育,公共服务,医疗,还是家庭等方面,作为一种能提供生产力或劳动力的工具,机器人为人类进步作出了卓越的贡献,并且有希望在工业革命以及信息技术革命之后,成为人类社会飞越式发展的人工智能革命的核心的构成部分,根据专家的预测,到2025年左右,机器人会在全球范围内产生1.7到4.5万亿美元左右的经济收益,这是一笔令人惊讶的收益,也代表着机器人在当代科技发展中的重要地位,是不可撼动的。
而机器人和传统行业有着一个相当大的不同点,那就是机器人的核心竞争力是科技技术,不能像传统农业工业一样靠降低成本来吸引消费,占据市场。
而机器人真正核心关键的地方,并不是底层的硬件,目前的机器人能完成的功能大多都相同,但是相同的功能如何通过软件去使用才是机器人技术的核心,同样的一把剑,在普通人手里和用剑的高手手里是截然不同的,也就是这个道理。软件控制了机器人的各种性能,作为机器人的“大脑”,操控着机器人的行为。
通过软件来给机器人编写行为模式,思考模式,来让机器人具有人工智能,能像人类一样学习思考,是当前机器人发展的主流趋势[5]。目前在美国日本等国家,已经开发出了高度智能的人型机器人,他们能像人类一样思考学习探索未知的事物,具有自己的一套思考模式,甚至能与人类进行辩论,达到了相当高的智能性。
伴随着深度学习这门新兴学科和语音识别技术的不断发展,把深度学习和语音识别结合起来实现机器人的听觉系统,也成为了一个热门的研究话题。
对于本文所谈到的NAO机器人,目前国内外NAO机器人是在学术领域运用最广泛的类人机器人,在2010年上海世博会作为高端科技大使,也曾是法国巴黎大区馆的吉祥物为人们提供导游,被全球50个国家的550间高校和实验室购买作为研究工具,NAO机器人参与的项目包括了语音识别,视频处理,模式识别,自动化等多个领域,因此NAO机器人的发展前景是非常好的,在教育方面,NAO机器人也正在尝试被用作教学用机器人来使用,此外,NAO机器人的第二代也即将上市。
人类区别于其他动物的一点就是人们会使用工具,从农耕时代的简单工具的使用,到工业复兴以来,人们开始制造使用机器,让机器得到快速发展,到当今社会,机器已经不再局限于一个实体的存在形式,很好的表现就是机器人,不仅是以实体方式存在的形态互异的机器人,比如本课题设计到的语音驱动控制的运动机器人还有用于医疗的纳米机器人等等,也有以非实体形式存在的人工AI,例如游戏里的AI智能还有微信公众号的AI客服等等。可以说,机器人已经以各种各样的形式渗透进入了我们的日常生活中,并给我们带来了极大的便利,所以对于机器人这方面的研究必定是意义非凡的。
1.3 本文研究内容
本文对语音识别发展的历史,语音识别技术的上层和底层原理,对隐马尔科夫模型做了一个简单的介绍,以及声学模型状态网络等也有一个易懂的说明,之后介绍了机器人是怎么进行语音识别的,此外,对机器人发展的整个历史途径,机器人的分类发展做了介绍,以及本文用到的NAO机器人的近几年发展研究的状况,结合二者,用机器人作为底层的硬件,用choregraphe作为上层的软件,介绍了choregraphe软件是如何使用的,以及本文所用到的choregraphe的一些模块的使用和说明,编写算法逻辑,来使机器人能够接受到人说话的语音,在进行识别之后,执行相应的动作指令,完成语音驱动控制机器人运动。同时给出了实验的结果和结论的验证,对课题未来的发展进行了展望,期望我国在机器人方面的科研能一片坦途。
1.4 论文结构
第一章绪论:对本文的研究背景还有意义以及当前国内外的研究现状做出了一个统述,
第二章:对机器人的发展历史和NAO机器人的功能等做了一个简要的介绍,
第三章:则是谈到了语音识别技术的发展和语音识别技术的原理,
第四章:讲了阿尔巴兰德公司开发的choregraphe软件的使用方式和本文所涉及到的choregraphe的图形化程序,
第五章:给出了本次毕业设计的结果和分析。
第六章:对本次毕业设计的总结和展望,附录部分给出了choregraphe使用模块的代码。
第二章 NAO机器人原理
2.1 机器人发展历史
当前社会,全球各地对于机器人的定义和概念渐渐有了一个共同的认识。在二十世纪七十年代的末期,美国机器人协会提出了一个关于机器人定义的概念,后来被联合国标准化组织作为标准,定义了机器人。机器人是一种可以通过编程语言来进行控制,并且有着多种多用功能的,用来搬运工具以及零件等物品,所使用的一种操作工具。也就是说,使用自身的动力以及控制能力来实现一系列功能的机器工具,我们把它称作机器人。机器人与以往人类所使用的工具一样,都是为了方便进行某些特定的操作来设计出来的,能带给人类便捷的一种工具。比如人类在挖地的时候会使用铲子而不是直接用手刨土,铲子作为一种工具在人类挖地的时候带来了极大的便捷,到了现在社会,人们会使用挖掘机来进行挖地的工作,工具也在随着人类科技的发展而与时俱进,带来的便捷也越来越大。
迄今为止的机器人的发展历史可以大致分为三个阶段。
第一个阶段也就是上世纪六十年代的时候,机器人的发展出于刚刚起步的状态,此时的机器人对人们来说还是一个非常新鲜的东西,能实现的功能也是非常少,当时的机器人还不具有自主学习的能力,也只有一直重复执行已经编程好了的程序,停留在等待执行命令与不停执行命令的阶段。学过编程的同学应该都知道,刚接触编程学习的时候使用的控制窗口就是不断等待输入来反复执行相同的程序。
在第二个阶段中,对于机器人的智能型,作出了很大的改良,也就是二十世纪七十年代的时候,此时使用的机器人是离线编程机器人,这些机器人可以结合工作时候的实际情况来执行不同的任务,转变任务的内容,就好像编程的时候写入了很多个case,根据不同的情况,可以调整要执行的任务来完成一个整体性的工作。比如说我们在夏天经常使用的空调的自动模式,当室温高于一定温度的时候,空调就会放出冷气进行制冷来让室温降低使人的感觉停留在一个舒服的温度,当已经达到一定温度以下的时候,空调就会进入待机的状态,不再放出冷气,保持室温处于这一温度附近,来节约能量。
第三个阶段也就是二十世纪的八十年代一直到现在为止的发展阶段,在第三个阶段,人们对于深度学习的研究不断深入,让机器人拥有了相当高的智能,也就是智能机器人,这类机器人一般配备了许多各种各样的传感器来感受周围环境的变化,或者是监听一些指令,并且他们具有很强的自主性,可以自主学习来适应环境的变化。
机器人也分成了很多的类别。最早出现的机器人的范畴属于工业机器人,也就是作为一种工具来代替人们来完成一些劳动,1961年,美国凭着其领先于世界的科技,人类历史上第一台工业机器人,UNIMATE,就诞生了,在这之后,稍微晚于美国开展机器人研究的日本引领了世界机器人研究开发的脚步,在短时间内快速发展,不论是生产,出口,使用,各方面都位列世界第一,赢得了“工业机器人王国”的美誉,虽然在这个时候的机器人还不够智能化,只能完成一些简单固定的重复性工作,所以应用最多的工业领域也就是焊接还有装配,其中焊接使用的机器人更是大约达到了三分之一左右的惊人占比。
在工业机器人之后,机器人逐渐踏入了其他领域,比如医疗还有生物领域,在这个时期,日本东京大学以守为主的一群人首次研发出了可以应用于微治疗领域的微作业系统,同时,美国华盛顿大学也研究出了可以用于蛋白晶体操作的微作业系统。当时日本东京大学完成的纳米机器人,可以在电子显微镜下完成超级大规模的集成电路的铝线的切割实验。
因为出于经济以及技术问题,当时的图像处理发展得还不够成熟,以及机器人还未拥有足够的智能,比如在进行采摘作业的时候,机器人并不能够很好地认知到果实的所在以及果实的成熟程度来进行采摘,所以机器人在农业方面的发展与其他行业相比起步较晚,直到二十世纪八十年代开始,以日本为主的一批国家才开始了机器人在农业上的运用的有关研究,而一直到2011年,日本才开发出一款草莓采摘的机器人,通过CCD摄像头来探知草莓果实的所在位置还有成熟的程度,进行采摘。这款机器人可以减少果农的压力,轻松劳动,推动农业发展,但同时,在这技术还不普遍的时候,作为经济收益相对较低的农业来说,能否让这种机器人广泛普及以及配备是一个很大的问题,机器人想要广泛应用在农业上,还需要技术以及经济上的重大突破。
类人机器人其实是发展得比较早的一类机器人,在二十世纪六十年代的时候,就已经有双足行走机器人的出现。在1973年,在日本早稻田大学,诞生了人类历史上第一款真正意义上的类人型机器人,WABOT-1,这款机器人突破了当时很多技术上面的重大难点,可以实现一些简单的动作,静立行走,抓取物体等人类可以完成的相对于简单的动作,也是现在这些类人型机器人的雏形。不得不说,日本在机器人方面的研究是出类拔萃的,在至今为止日本的技术都走在世界前沿,近几年,日本研究出了诸多类人型机器人,与人类拥有着高度相似的外貌和思维,可以通过学习来认知世界,甚至可以与人进行辩论,其智能水平,达到了一个超乎想象的地步。
最后就是自重构模块机器人,这类机器人的研究开始于二十世纪八十年代,由许多部件组装而成,目前非常少见,还处于实验室的研究中。
2.2 NAO机器人介绍
NAO机器人是一种双足类人型机器人,由法国的阿尔巴兰德公司开发,同时,该公司也开发了choregraphe这款软件专门用于NAO机器人编程,choregraphe封装好底层模块,便于用户使用图形化编程来简单明了地控制NAO机器人的行为,也可以通过pthyon或者C 语言来编写NAO机器人的行为。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: