多普勒雷达外文翻译资料
2022-12-17 14:45:21

英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
多普勒雷达
摘要:
扫描多普勒雷达具有在垂直于径向矢量的方向上测量径向速度的切向剪切或速度的径向分量的梯度的能力。在水平方向上足够大的切向剪切揭示了水平面中涡度的一个表达式。如果剪切在涡旋半圈所需的时间内足够稳定,则多普勒雷达可以很好地识别涡旋,并且通过剪切图形的拉伸超过其直径的深度,以及角色的不变性进一步证实了涡旋。剪切相对于视角的变化。在旋转旋转中的涡旋在多普勒速度显示器上具有特征上均匀的特征,然而,可以根据天线光束的分辨率限制来平滑该特征。尖锐的速度峰值向下舍入到半功率天线波束宽度内所包含的速度间隔的大约一半。
在严重雷暴中高度为1-4 km的持续涡旋的图示显示了一个固体旋转的岩心,平均半径为600米,涡度高达0.06s-1,被一个相当小的涡旋的大面积环绕。在30分钟的时间内,在涡旋中心1.5-2 km的高度发现了一个回波孔,其结构形状与无回声拱顶形状非常相似,几次龙卷风暴在大平原中发生了更大规模的爆发。
1.简介:
对流风暴偶尔会发现组织良好的旋转运动,其大小和强度从大型风暴到大规模的环流,涉及一系列风暴的缓慢旋转。 Fujita(1958,1960)提出了一些关于外围雷达超声波特征的总体旋转和风暴的云边界的一些优秀观察。 这些例子,以及富士和其他人随后的观察,支持了Brooks(1949)提出的假设,即龙卷风涡旋通常嵌入在龙卷风和天气尺度母旋风之间的规模中间的不太强烈的旋风循环中。 因此,对流风暴中的大规模涡旋研究似乎是扩大我们对龙卷风发展环境的看法的一条生产途径。
目前正在开发的多普勒雷达作为气象工具,使用预先沉淀的颗粒作为风的示踪剂,为研究风暴中的空气流提供了极具吸引力的可能性。然而,单多普勒雷达只能测量沿着雷达波束的降水运动的成分。三个雷达,从三个不同的位置观察相同的体积,将是体积内矢量风场的无差别定义所必需的, Lhermitte(1968)提出的技术由Armijo(1969)进一步阐述。幸运的是,可以用单个多普勒雷达获取关于风场的有用信息.Lhermitte和Atlas(1961)展示了如何通过VAD(速度·方位显示)方便地确定围绕雷达的风周围区域,如果合适的话跟踪器存在于由天线扫描的大多数圆圈中,并且示踪器的风和下降速度可以被认为是均匀的。Caton(1963)提出了VAD方法的显着扩展,以测量在降水速度可以用足够的准确度估算的情况下广泛风暴的水平偏差。另一方面,涡度是难以捉摸的;它的测量需要垂直于雷达波束的风分量的知识,这是多普勒雷达未观测到的。然而,许多研究人员,包括Easterbrook(1967),Donaldson及其同事(1967,1969)和Lhermitte(1969),都提出了对流风暴的单多普勒观测,并在其流动模式中提出了令人信服的涡度建议。以下讨论的目的是说明可以从仅由一个多普勒雷达提供的径向速度场识别涡旋或涡旋中心的条件。
Lhermitte和Atlas(1961)表明,VAD(速度·-方位显示)可以方便地确定雷达周围的环形区域的风,如果天线的大部分圈内都有合适的跟踪器,那么跟踪器的风速和下降速度可以被认为是均匀的。Caton(1963)提出了VAD方法的一个重要扩展,即在降水下降速度可以较高精度估计的情况下,测量大暴雨中的水平散度。另一方面,涡度是难以捉摸的;它的测量需要垂直于雷达波束的风分量的知识边缘,这是多普勒雷达无法观测到的。然而,包括伊斯特布鲁克(1967)、唐纳森及其同事(1967,1969)和勒米特(1969)在内的许多研究人员,都提出了对流风暴的单多普勒观测,并给出了令人信服的涡度流态。以下讨论的目的是说明从单多普勒雷达提供的径向速度场可以识别涡旋或涡度中心的条件。
2.涡旋识别标准
对涡旋多普勒雷达识别标准的讨论假定了一个由雷达解决的系数涡旋尺度。 在下一节中将简要介绍分辨率限制。
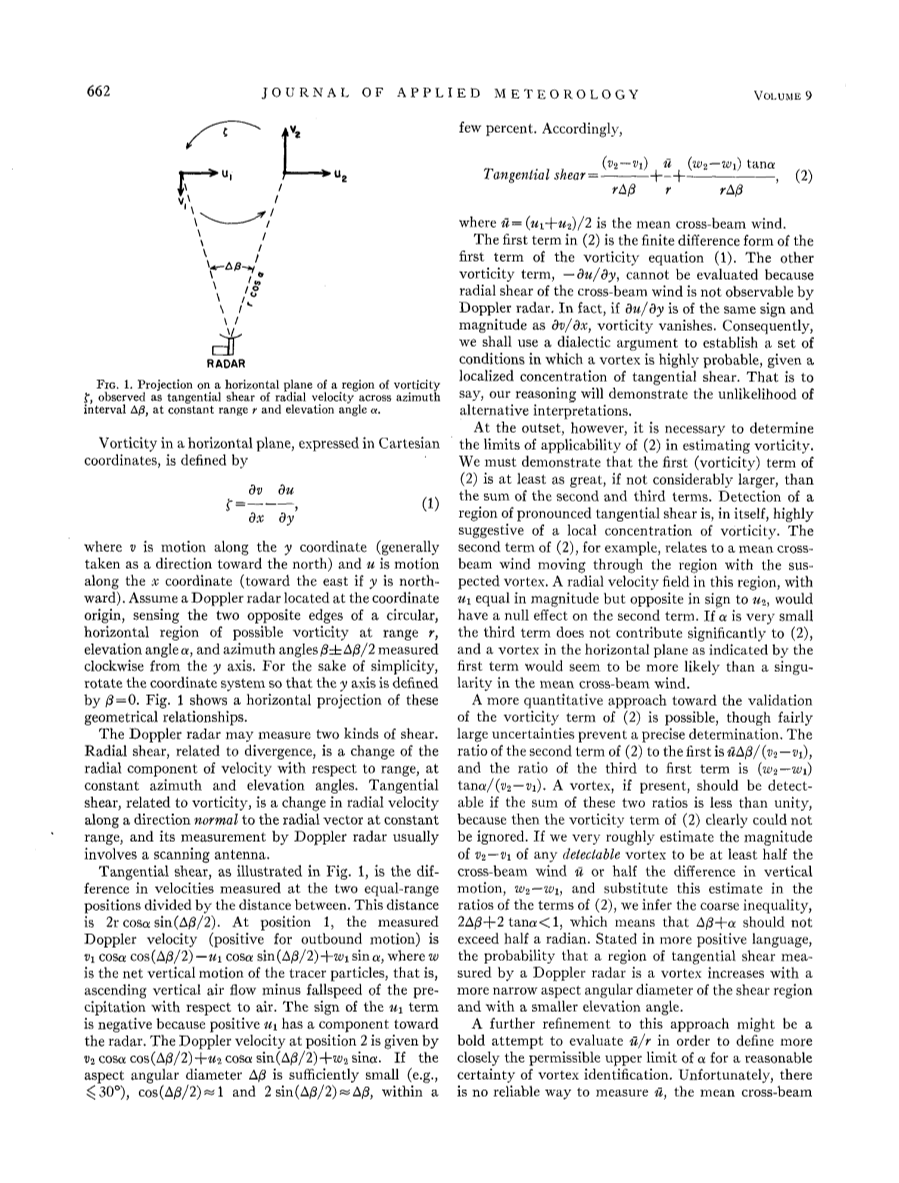
(图1.在涡度区域的水平平面上的投影,观测到在恒定范围gamma;和仰角alpha;下,径向速度在Delta;beta;方位角上的切向剪切。)
以卡特西安坐标表示的水平线上的涡度,被定义为
其中V是沿y坐标运动(通常称为朝向北方的方向),u是x坐标的运动(如果y是北方,则向东)。 假设多普勒雷达位于坐标原点处,感测圆形水平区域的两个相对边缘。 可能的涡度范围gamma;,仰角alpha;和方位角szlig;plusmn;Delta;szlig;/ 2从y轴逆时针测量。 为简单起见,旋转坐标系使y轴固定为szlig;= 0。 图1显示了这些几何关系的水平投影。
多普勒雷达可以测量两种剪切。与发散有关的径向剪切是速度的径向分量相对于范围,恒定方位角和仰角的变化。与涡度相关的切向剪切是在恒定范围内与径向矢量垂直的方向上的径向速度的变化,并且其通过多普勒雷达的测量通常包括扫描天线。
如图1所示,切向剪切是在两个等距位置处测得的速度差除以两者之间的距离。这个距离是2r cosalpha;sin(Delta;szlig;/ 2)。在位置1处,测量的多普勒速度(出站运动的正值)是v1cosalpha; cos(Delta;beta;/ 2)-u1 cosalpha; sin(Delta;szlig;/ 2) w1sinalpha;,其中w是示踪粒子的净垂直运动,即是,上升的垂直气流减去预先沉降相对于空气的速度。u1的符号是负的,因为正u1具有朝向雷达的分量。位置2的多普勒速度由V2cosalpha;cos(Delta;beta;/ 2) u2cosalpha;sin(Delta;beta;/2) w2sinalpha;给出。如果角度直径Delta;szlig;足够小(例如,≦30°),则cos(Delta;beta;/ 2)asymp;1和2 sin(Delta;beta;/ 2)asymp;Delta;szlig;在几个百分点内。因此,其中是平均横梁风。
(2)中的第一项是涡度方程(1)的第一项的有限差分形式。另一个垂直项,不能被计算出来,因为横梁风的切变是无法被多普勒雷达观测。事实上,如果有相同的标志并且和大小一样,忽略涡度项。这样,我们将使用辩证论证来建立一组条件,其中涡旋是非常可能的,给定切向剪切的局部集中。这就是说,我们的推理将证明在解释中不可能替代。
然而,首先,有必要确定(2)在估计涡度时的适用范围。我们必须证明(2)的第一个(涡度)项至少与(2)的总和一样大,如果不是很大的话。第二和第三任期。检测明显切向剪切的区域本身就是局部涡度浓度的高度消化。例如,(2)的第二项涉及通过具有悬浮涡流的区域移动的平均横梁风。该区域中的径向速度场,其中U1的大小相等但符号与Ux相反,将对第二项产生零效应。如果alpha;非常小,则第三项对(2)没有显着贡献,并且如第一项所示的水平面中的涡旋似乎比平均横梁风中的单义更可能。
虽然相当大的不确定性妨碍了精确的确定,但是可以采用更加量化的方法来验证(2)的涡度项。(2)第二项至第一项的比值是,第三项与第一项的比值是。涡旋,如果如果这两个比率的总和小于1,则应该是可检测的,因为那时(2)的涡度项显然不能被忽略。如果我们非常粗略地估计任何可检测涡流的V2-V1的大小。至少是横梁风的一半,或垂直运动的差异的一半,,并用(2)项的比率代替这个估计,我们推断出粗不等式,这意味着应该注意半弧度。用更积极的语言表示,多普勒雷达测量的切向剪切区域是涡旋的概率随着剪切区域的较窄的纵向角直径和较小的高度而增加。
对这种方法的进一步改进可能是为了对进行评估,以便更准确地确定alpha;的允许上限,以便合理确定涡旋识别。 不幸的是,没有可靠的方法来测量uuml;,平均横梁风,用一个多普勒雷达。 也许通过将环境风速乘以其方向与雷达波束之间的角度的正弦来进行粗略的数量级估计。 当然,必须认识到环境风很可能代表对流风暴中的平均流量。 然而,该程序在其中距离r足够大以至于(2)的项明显对切向剪切有贡献的情况下是有价值的。
涡旋识别的下一个要求是切向剪切的持久性程度;不稳定状态是没有必要的。相反,我们需要速度的空间导数的主导,而不是速度的衍生物。当然,在观测期间剪切的时间变化将对涡旋的识别产生不明显的影响,它们比剪切的平均值小一个数量级。事实上,基本上更大的可变性可能是非常容忍的。考虑在图1所示的一个或多或少的圆形区域内的剪切,由一个稳定的时间变量组成。我们需要剪切的稳定组分持续一段时间Tp,其中剪切模式的两个可观察侧面可以交换,因为一旦发生这种情况,剪切的稳定部分所涉及的空气就没有时间或空间的逃逸途径从参与某种形式的循环细胞。如果大致圆形横截面的涡旋是切向剪切的主要原因,则持续时间尺度Tp是一次旋转的周期的一半,即,
其中条形表示在Tp期间剪切图案的直径和切削速度的平均值。 如果(2)的第二项和第三项与第一项相比较小,那么可以很好地评估Tp,得到T的乘积和测量的切向剪切的倒数。 椭圆剪切图案可以从速度显示中识别出来,并且将需要比(3)所示的更长或更短的时间用于半转,这取决于其椭圆度和相对于测量的剪切矢量的取向。 这些结果不适用于高度细长的图案,例如剪切线,因为图案两侧的大部分空气可能永远不会互换。
值得一提的是,涡旋(v2和v1)的对立面上的速度不一定在幅度上相等而在符号上相反。 例如,与雷达相关的涡旋漂移将显示为公共速度,(v2 v1)/ 2。。
在简单的基础上,持续一个相当稳定的切向剪切模式进行一半旋转本身就是一个合理的涡旋标准。考虑改变原生.已经消除了风的时间变化的重要性,有两种基本方法可以保持气流的连续性,这取决于未完成的任何一个/更多。 他们在图2中描述。在左边有一个简单的漩涡;在右边有一个奇怪的复杂的收敛和发散的交叉线。
(图2.径向速度V1和V2中切向剪切的另一种解释。虚线矢量表示未使用的速度U1和Y2正常于多普勒雷达波束。)
除了简单性的论证之外,如果切向剪切不仅在垂直方向上是持久的,那么还有另一个用于识别涡旋的标准。例如,如果剪切是根据图2的右手部分进行的,或者除了作为涡旋之外以任何方式进行,则涉及复合的传导细胞。在沿对流的对流尺度的大约一半处,应出现一定程度的非发散,其中唯一的剪切将限制在持续时间期间的时间变化的大小,加上(2)的次要第二和第三项。除了诸如龙卷风之类的奇异事件之外,我们大气层中持续运动的垂直尺度很少超过水平尺度的两倍,因此细胞复合体的非发散水平应该与图案的基部分开不超过横向剪切的水平距离,即rDelta;szlig;。在非发散水平之上,切向剪切的符号应该反转。即使在高度狭窄的对流单元的最极端情况下,剪切模式的显着变化(由多普勒雷达准水平观察)应该在与剪切模式的水平直径相等的垂直距离上发生,而不是涡旋当下。
还有一个用于识别涡旋的测试,但其应用需要特殊情况。该测试是Peace(1969)等人提出的一般技术的特例。在假设风场相对于回波准静态的情况下,通过单个多普勒雷达从测量推导出矢量风场。涡旋的剪切模式相对于水平视角是定性不变的。图2很好地说明了这个特征。由多普勒雷达观察,涡旋(a)的切向剪切的极性不取决于观察它的位置。另一方面,图2的图案(b)的切向剪切随着视角的变化gt;45°而反转符号。
(图.3a 由恒定角动量区域围绕的固体旋转涡旋核心的切向速度分布图(虚线表示由宽天线波束观察到的峰值退化)。b. 3a中涡旋速度分量的轮廓,由多普勒雷达测量,具有完美分辨率,从页面底部观察涡旋。(刻度,标记为r1 .. r4 ... r7,表示距离雷达的范围 。) c. 与PSI显示的3b相同的图案,或计划剪切指示器。(注意,穿过涡旋中心的PSI弧再现了涡旋的切向速度,除了极性的反转。))
因此,如果一个切线切变模式持续存在,当它以这样的方式经过雷达时,它的方位角变化接近45°,例如它从雷达站向东北方向的变化,那么涡旋就很有可能存在。
总之,如果i)在准水平平面中存在显着的径向速度切向剪切,并且角度直径和剪切模式的仰角之和,则通过单个多普勒雷达观察可以很好地识别涡旋。 不到半弧度 - 参见下面的方程式(2); 和ii)切向剪切的稳定分量持续至少涡旋一次旋转所需时间的一半[见方程式(3)]。进一步确认涡旋是通过以下方式给出的:iii)剪切图案的垂直延伸直到高于其直径的高度,以及iv)剪切图案的特征的定性不变性,其中视角的变化接近或超过45°。
3.多普勒雷达观测到的涡旋模式
用于显示涡旋的多普勒雷达观测的两种更方便的方案是最近由Armstrong和Donaldson(1969)开发的径向速度和平面剪切指示器(PSI)的轮廓。 这两种技术都具有潜在的实时能力,尽管速度等高线只能在风暴分析中使用到目前为止。
通过任何方法显示涡旋取决于雷达波束的分辨率和反射率n的分布以及涡旋区域内的速度。 如果已知实际分布,则可以直接计算在任何固定天线位置和距离门处观察到的平均速度:
其中I是天线波束模式函数(方程为方程,以说明雷达波的双向路径),theta;和ф是水平和垂直角距离波束中心,V是沿着方向的速度分量。雷达波束式(4)假设ŋ和v的所有值在对应于雷达脉冲长度的相对窄的范围区间内被平均。 逆问题,即从速度测量中恢复实际速度模式并不容易。但是,熟悉天线分辨率对简单模型观测速度模式的影响是有帮助的。 这将针对具有恒定反射率场的固体旋转涡旋的情况进行。
- 显示由恒定角动量包围的实心旋转特性
作为实体旋转的物体的速度场由分量给出,v = kx,u = -ky,其中x和y是沿着位于主体中心的坐标轴的距离,k是常数。如果k为正,则旋转在北半球是旋风的。最大风的环在半径Rm处发生。超过这个半径,循环可能以各种方式下降。例如,如果角动量在固体旋转的核心之外是恒定的,则速度将与距离涡旋中心的距离R成反比地减小,并且Rgt; R
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20479],资料为PDF文档或Word文档,PDF文档可免费转换为Word



