60Feet帆船游艇船型方案与快速性计算分析外文翻译资料
2021-12-14 22:49:32

英语原文共 19 页
英语翻译
海洋工程
游艇工程研究新楼梯实验室F. Fossatia,n, I. Bayatia, F. Orlandinia, S. Muggiascaa, A. Vandonea, G. Mainettia, R. Salaa, C. Bertorellob, E. Begovicb
本文介绍了莱科创新中心项目的概况,特别是帆船实验室项目——一艘10米长的帆船,旨在成为帆船研究领域的一个全尺度测量装置。介绍了科学框架、测量能力以及主要设计、建造过程、项目管理和调试,并举例说明了在第一次海上试验中获得的初步收集数据。最后概述了正在进行的项目任务和未来的项目发展,包括帆船研究领域的潜在研究和知识成果。amp; 2015爱思唯尔有限公司保留所有权利。
1. 介绍
本文介绍了莱科创新中心项目的概况,特别是帆船实验室项目——一艘10米长的帆船,旨在成为帆船研究领域的一个全尺度测量装置。莱科创新中心(LIH)是位于米兰理工大学莱科校区的一个专门的航海研究和培训中心,旨在鼓励技术在航海和相关领域的交流。莱科创新中心由两个基本实体组成:
帆船实验室(SYL)是一艘10米长的帆船,配备了仪器,以获取有关帆船及其部件的行为变量的全面数据,以支持科学的方法设计和研究与帆船设计和性能相关的活动。
(可持续海洋研究及科技)实验所旨在支援航运业,以应付不断增加的创新及可持续发展的迫切需求。具体的研究领域包括对航海产品全生命周期(LCA)的分析和评价、拆装设计、建筑和装配新材料的试验、人体工程学、船上安全和舒适、室内照明和空气质量的改善。
除此之外,在米兰理工大学的其他地点也有研究基础设施,比如位于米兰博维萨校区的欧洲最大的风洞(Fossati, 2006)。本文的目的是提供帆船实验室项目的概述:简要概述了帆船设计的起源和早期演变,并描述了主要的设计和性能标准。设计、建造程序、工程管理及调试工作将于下文说明;将详细描述测量能力和数据采集过程。工程仍在进行中;为了使这一新的可用工具所提供的能力得到全面的研究,报告和讨论了在第一次海上试验中获得的初步收集数据的一些例子。最后概述了正在进行的项目任务和未来的项目发展,包括帆船研究领域的潜在研究和知识成果。
2. 全面的测试
预测赛艇最大潜在性能的能力是一项强大的资产,但需要验证实验结果和数值推导数据。
前有条不紊的方法计算游艇的性能并不是在三十岁之前展示的华而不实的情况下当奥林Stephens和戴维森史蒂文斯理工学院实验室开发了一个完整的实验程序结合全面测试和航行坦克测试比例模型的意图决定系数和预测性能的帆船航行。
帆船的潜力的估计速度仅根据其设计开始于1930年代的海上试航华而不实的34ʹ6ʺ罗亚山23ʹ低潮位设计的斯帕克曼和斯蒂芬斯。
自1936年以来,对小技巧帆船的性能进行了全面的测试,大部分测试都是在美洲杯帆船技术发展的框架下进行的,目的是进行比较分析。
奥林·斯蒂芬斯(Olin Stephens)和斯蒂芬斯研究所戴维森实验室(Davidson Laboratory at Stevens Institute)成功地利用Gimcrack将尺度模型结果与全尺度航行试验关联起来,得到了纵向驱动力、气动侧力和倾侧力矩。由这些研究得到的模型和全尺寸性能之间的相关常数称为Gimcrack系数(Davidson, 1936)。Gimcrack系数是已知的第一个此类比较,证明是帆船性能预测科学的重大突破。
目前可供设计人员和建造人员使用的科学数据是基于通常从风洞、拖罐或试验台等人工环境中分析的尺度模型、原型或材料样本中获得的数值或近岸数据的研究。
特别是在风帆空气动力学方面,目前用来描述风帆计划的方法,要么是在风洞中按比例模型进行测试,要么是在全尺寸船只上进行测试,要么是使用计算流体动力学。
目前的数值方法为迎风和近程航行提供了较好的计算结果,但对顺风航行的设计还处于发展阶段。这是因为数字技术为航空部门开发可以应用于帆用于逆风航行,因为这些像薄翼型只影响有限的流动分离,虽然它是更复杂的解决流动模式,发展围绕一个大三角帆或流动分离的领域。除了顺风航行空气动力学实际上是受空气弹性变形的影响机制:“飞行”形状的d帆在实际航行条件下由压力分布决定作用于帆,不只是依赖风力强度和方向也从结构属性和帆削减控制作用于帆的棱角以及力量应用于钻井平台和帆。所有这些因素都决定了一个特定的风帆在实际航行条件下所能达到的飞行形状实际上是无限的,这一点与逆风风帆的不同之处在于。
真正的顺风帆,作为大三角帆和MPS,因为建筑材料的重量轻和它们相对不受约束的性质(Ranzenbach和Kleene, 2002;Graf和Muller, 2009;Renzch和Graf, 2013)。
由于数值工具可靠性不足,以及对模型试验、数值模拟(如CFD方法)和全尺度数据之间的一般关系有了更好的理解,鼓励了在真实航行条件下全面收集数据的雄心。
尔格莱姆托(Milgrametal)最初开发的一种航海状态下实际帆力和力矩的直接测量系统通过测力元件与船体连接。金泽理工学院(Masuyama and Fukasawa,1997)和柏林TU (Hochkirch and Brandt,1999)开发的Fujin和DYNA项目的最新经验明确证明了帆船测力计的高有效性和潜力。
特别是Masuyama(2013所做的工作主要是研究稳态下逆风风帆的空气动力学,并将所得结果与实测风帆的数值计算结果进行对比形状作为输入数据。在此基础上,测量了跟踪过程中的气动力变化,提出了一种新的机动仿真模型。另一方面,DYNA项目也广泛涉及到水动力学方面的互动船体龙骨-舵,旨在优化附件。
Hentinen和Holm(1994)给出了另一个涉及全尺寸测试的有趣经验,其中一个项目集中于帆船上的实际载荷,如撞击、舵、链板和龙骨上的接地载荷。“半吨级”(一艘约390 LOA的赛艇)由夹层结构的右舷和单表皮结构的左舷组成,除了底部结构外,还有两个纵向纵梁,并配有压力和应变仪。在2700海里的航行中收集了统计数据其中300小时是测量时间,提供新的和有价值的信息。
由于工艺尺寸有限,最近进行了一系列国际蛾类全尺寸拖拽试验(Zseleczky和Beaver, 2009)来表征一些主要品种142/5000 影响飞蛾性能的参数为进一步提高飞蛾船的性能提供了良好的技术基础。
照实验验证航空弹性模型。(2011), 描述了在J80型帆船上进行的全方位测试活动:开发专用仪器测量负载寿衣和紧张的帆,帆的游艇运动,形状和飞行导航数据提供有用数据的验证固耦合模型中描述奥吉尔et al。(2012)。
目前,几个研究小组正在对全尺度帆表面压力分布测量进行研究:这实际上代表了全尺度试验作为模型试验和数值方法之间的桥梁作用的关键点。
在Lozej etal.(2012)、Viola和Flay(2012)、Graves etal.(2008)和Pudduetal.(2006)等人发表的几篇压力测量报告中;与实测进行的对比显示,全比例尺和模型比例尺的压力分布存在非常有趣的差异。压力测量也与帆形测量相结合,在全尺寸下评估力,并尝试对稳定和非稳定帆的空气动力学进行有趣的研究(Le Pelley et al., 2012)。
在这个框架内,帆船实验室的目标是允许压力和帆形测量,以及提供更精确的信息,由于测力计包括船的动力学。此外,还提供了一些与压力和船型测量系统有关的演化过程。
3.帆船实验室测力计系统
帆船实验室(图1)的设计目的是作为一个动力平衡,并受到麻省理工学院(Milgram et al.,1993)、金泽理工学院(Masuyama and Fukasawa, 1997)和柏林TU (Hochkirch and Brandt, 1999)的经验的启发和鼓励。
该系统的核心是船体内的5083铝合金框架,允许整个钻机和帆计划连接到一组测力元件,以测量由帆和帆传送到船体的总力和力矩。
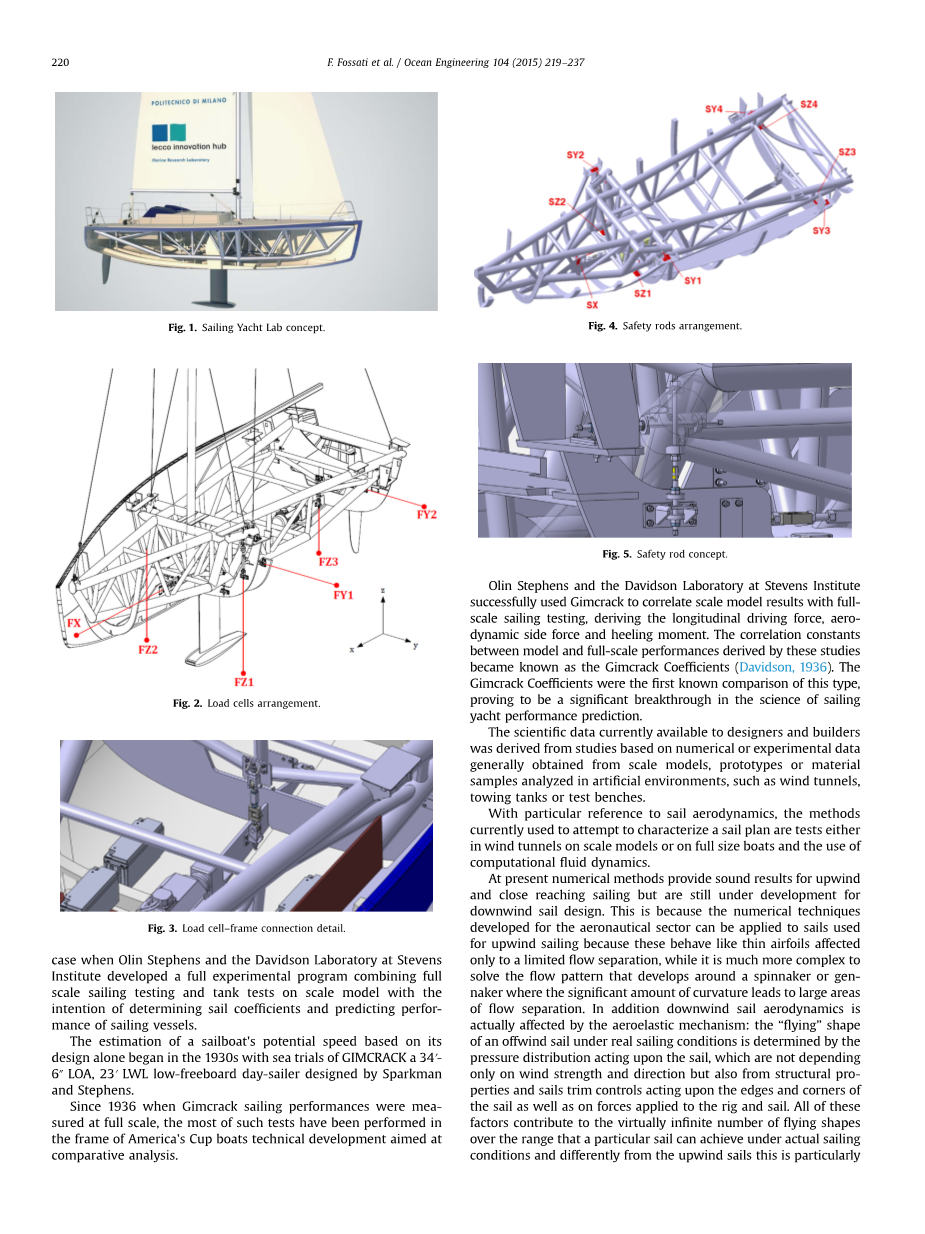
图2所示为使框架相对于船体保持均衡约束结构的六个测力元件的总体布置。
在所示参考系统中,设置6个测压元件如下:1个x方向测压元件(FX), 2个y方向测压元件(FY1, FY2), 3个z方向测压元件(FZ1, FZ2, FZ3)。选择他们的立场背后的想法是尽可能地接近到最高负荷沿各自的方向,因此,如FX细胞是放置在主踏板附近,连接船体的中心部分的框架。此外,单元定位的一个重要标准是它们在维护操作期间的可达性。所采用的单元格的最大载荷分别为FX、FY1、FY2、FZ3和FZ2的20kn、FZ1和FZ2的50kn。
负载细胞连接的框架和船体修复任何可能的轴向偏差允许每个mono-axial负载细胞来衡量不同的部队不超过轴向的(图3)。额外的系统能够保持帧之间的连接和船体设计和制造。这是一个基于被动安全杆的安全系统,在任何意外的测力元件故障或仅仅在没有测量航行条件的情况下,以及当帆船在港口时,保持框架和游艇索具在标称位置附近。如图4所示,安全杆可分为X方向1根(SX), Y方向4根(SY1, SY2, SY3, SY4), Z方向4根(SZ1, SZ2, SZ3, SZ4)。安全棒是由螺旋棒连接到胶合板舱壁的C形法兰,螺纹大磁盘负载细胞接触,以防失败(图5)。这些磁盘也可以旋紧的C形法兰没有度量航行条件(或停泊)为了防止负载细胞从任何出乎意料。
3.1。框架结构设计
在对设计荷载和索具单元在甲板上的位置进行初步评估后,采用结构分析(有限元法)和三维CAD工具对最终的框架结构进行了多目标迭代设计,确定了最终的框架结构。这个过程处理几何约束和结构阻力的最大化,如图6所示。
为了提高结构的整体惯性矩,要求框架尽可能地适应船体空间。尽管如此,几何问题也被考虑在内,例如连接钻机和框架的元素的定义与节点或主梁相对应。有限元结构分析导致几何修改内必须解决CAD工具,这反过来又需要进一步结构验证以及检查的一致性的新位置上的索具和空间适合机组人员和设备。
本文采用的有限元工具为FEMAP/MSC NASTRAN,所采用的有限元模型如图7所示。
框架结构材料的选择取决于满足耐腐蚀、刚度最大、重量最低、元件间连接方便、经济实惠等标准。从结构的角度比较不同材料是由考虑一个特定参数,E /gamma;,即弹性重量比,代表同时最大刚度和最低重量的要求。不锈钢和钛分别因为重量和成本而被丢弃。碳纤维管也被考虑,但丢弃的成本最高,并为困难的连接到框架的负荷单元。
5000 aluminum-manganese合金系列检测是最兼容的材料的要求:尤其是5083系列被选为主要框架的结构组成,而5086板焊接到框架的任务是连接索具和船体框架本身。图8为最终框架设计图,图9为制造中间步骤。
在制造过程中,采用数控工具对梁的端部进行切割,实现了不同梁之间的焊接连接。然后对梁进行MIG焊接,并对整个框架进行热处理,以消除焊接过程中产生的局部应力。关于框架结构设计的更多细节,读者可以参考(Report Dept. mechanical, 2012)。
3.2。功率计校准
该校准平台允许已知的载荷应用,如图10所示。
100多种加载条件被应用到功率计高达1kn使用水箱挂在绳子上。校准程序的目标是定义一个“校准矩阵”C:
这与6个测压元件的测量值有关:
F的力和力矩为艇体轴线,减为整个游艇的质心
矩阵C的元素的定义是通过对未知Cij的一个拟合过程来实现的,它是对一组实验测量值加上相应的一组已知载荷F的过确定问题的解。
为进行校准测试,将船设置在岸上,并通过校准平台施加载荷,也倾向于测试执行(图11),多向加载应用,由于船倾斜,以及每个加载的加载自己的一般方向条件应用的方向线荷载作用对游艇的身体必须侦测参考系。
为此,利用激光全站仪测量了绳索上M1、M2标记的位置,并测量了固定在甲板上的一组标记的位置。
更具体地说,参照图12,标记P伴随着指出,每一个项目的位置游艇被称为,和标记O, X和Y定义yacht-fixed参考系的削减对laser-fixed参考系允许之间的旋转矩阵评估激光站固定参考系和yacht-fixed参考系(绝对)。
矩阵C的元素的定义是由未知的过多问题的解决方案在一组实验测量年代加上相应的应用已知载荷f .为了完整性。13 - 15,校准过程的结果报道。分别定义εi和xi;i之后,百分误差(名义力应用与测量)和应用方向余弦的负载,对轴,整体比例错误可以写成:
Figs.13–15方向余弦函数F显示,总百分比的大小误差ε,相应的颜色。这些图形必须解释为:圆上的点半径1与负载情况下,力的方向没有,或小,组件沿着其余轴,这不是在图(即z在图13中,y图14和图15中的x),而径向移动盘的中心,第三部分增加的中心圆的限制,在负荷的方向完全沿着第三方向。因此,在无花果。13 - 15,光明与黑暗两个蓝色箭头表示两个样本加载情况下,可以确认在每个图中,由不同的视图:显示相同的错误更具体地说,它们是两种不同的情况下,相关框架加载基本沿着垂直方向(z)的盟友。为了完整起见,在图16中报告了误差作为不同负载水平的函数(即沿y方向的纯负载)。从图16可以看出,随着外载荷的增加,误差有
资料编号:[5282]



