波浪中船舶运动操纵的数值分析外文翻译资料
2022-07-30 16:25:44

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
波浪中船舶运动操纵的数值分析
摘要:
本篇文章主要介绍在入射波浪中船舶操纵性能和所导致的船舶运动反馈结果的数值分析,为此,开发了一个时域性的船舶运动程序来处理船舶划移和回转时的兴波干扰问题,并且加入了四个自由度的模块化操纵问题。在这个耦合问题中,可以通过使用直接压力积分法估计在船舶操纵轨迹中起重要作用的二阶平均漂移力。这个方法能够通过记录二阶平均漂移力和船舶运动试验中有无入射波存在时的平面运动轨迹被验证。通过现有的数据比较了两种船舶模型,方形系数为0.7的60系列船型和S-175集装箱船。本研究中的船舶操纵试验包括在静水中的Z形运动试验以及分别在静水与规则波中的回转试验。目前的结果表明运动轨迹的总体趋势有一个结论。
关键词:波浪中的船舶操纵性,耐波性分析,平均漂移力,时域建模,兰金面元法。
- 绪论
船舶的操纵性能一般能在静水中进行预测。这在初始设计阶段提供了非常有价值的信息。然而由于船舶通常是在波浪中航行所以在海水状况下的机动性能可能与平静的水域情况有明显差异。当船在波浪中转向时,波浪诱导运动和漂移力将增加,螺旋桨和方向舵的效率也会改变。因此,如果波浪的影响和相应的运动响应可以纳入这个船舶操纵的数学模型中,预测将会更准确可靠。这需要将船舶操纵方程和耐波方程进行有效的积分。
尽管成本高昂,波浪中的自由运动模型试验是预测船舶波浪运动的最可靠方法。自由运动模型的数个试验结果已经被提出,1980年的Hirano等人在规则波中进行了转向试验,2003年 Ueno等人用一个VLCC模型进行了转向试验,Z型操纵试验和停船试验,最近,Yasukawa(2006a,2006b)用S-175型集装箱船的模型分别进行了在规则和不规则波的回转试验。
同时,为了预测船舶在波浪中的操纵性能,已经开发了几种简化的数学模型。例如,Hirano 等人在1980年通过使用3自由度运动方程预测船舶在平静水中机动性能,仅计算波浪漂移力。在他的计算中,波动引起的运动被忽视了McCreight,在1986年发明了一种在波浪中的非线性操纵模型,在固定坐标系中预测了与波浪运动相关的水动力,如波浪激振力,附加质量和波阻尼。在他的研究中,他的模型已经通过使用条带法实现了。Ottosson和Bystrom在1991年提出了一种更为简便的方法。 假设附加质量和阻尼系数是定值,并能由船舶操纵运动中的平均遭遇频率得到。后来Fang等人在2005年根据时域仿真中得到的遭遇频率开发了一套计算水动力的数学模型。
在上述方法中,不考虑船舶运动造成的记忆效应。然而,Bailey等人在1997和Fossen在2005年采用了一种线性卷积分公式,以便考虑船舶在运动波浪中的不稳定记忆效应。虽然这种方法比不考虑记忆效应的其他方法更可靠,但卷积积分的精确计算并不简单,由于随时间变化的遭遇频率和航向角度,需要更多的计算时间。此外,在它们的预测方法中,并没有精确地计算波浪漂移力。为了以简单的方式考虑记忆效应, Sutulo and Soares引入了一个辅助的状态变量,这要比计算卷积分法简单很多,他们通过利用遭遇频率中的水动力计算开发了一种模拟流向的数学模型用来描述瘦长船体波浪中的操纵问题,最近,Skejic 和Faltinsen能把二阶的波效应考虑的更加准确,他们使用许多不同的方法计算了二阶平均漂移力,并比较了每种方法。此外,他们还提出了一种将低频运动和高频运动分离开的两倍比例模型。Yasukawa(2006a,2009)也考虑了二阶平均漂移力,通过动量守恒定律计算规则和不规则波中的回转轨迹。但是,船速的影响并没有被彻底地包括在内。所有以前的研究都采用二维条纹法来考虑波浪引起的船舶运动。最近,Lin等人在2006和Yen等人在 2010年都采用三维面板方法解决了船舶操纵问题。在他们的研究中,非线性船舶运动程序LAMP(大振幅运动程序)得到了扩展与补充。Yen 等人在2010使用直接压力积分法考虑了二阶平均漂移力。
在本研究中,通过使用时域船舶运动程序WISH(非线性波浪感应载荷和船舶运动分析计算机程序)解决了波浪中的船舶操纵问题,该方法基于B样条兰金面元法。因此,两个主要的领域通过这一计算耐波性的程序得到了延伸:拓展到大幅度的侧向运动和耐波性与操纵性模型的耦合。在这种方法中,使用直接压力积分法计算二阶平均漂移力,并且将模块化船舶操纵模型与耐波性模型进行了整合。
通过将开发出的计算机程序运行结果与发表的实验数据进行比较,例如60系列(方形系数为0.7)船舶在静水中的Z型操纵试验,S175集装箱船在静水和波浪中的回转试验。计算结果与实验数据吻合良好。
2. 边界值问题
当船以波浪中以不恒定的速度行驶时,比普通的耐波性问题要复杂很多。虽然边界值问题的形式与普通耐波性问题相同,但应包括由于航向速度和角度的变化引起的时空变化。另外,为了解决这个问题,需要考虑非线性的粘性成分造成的重要影响。
2.1坐标系
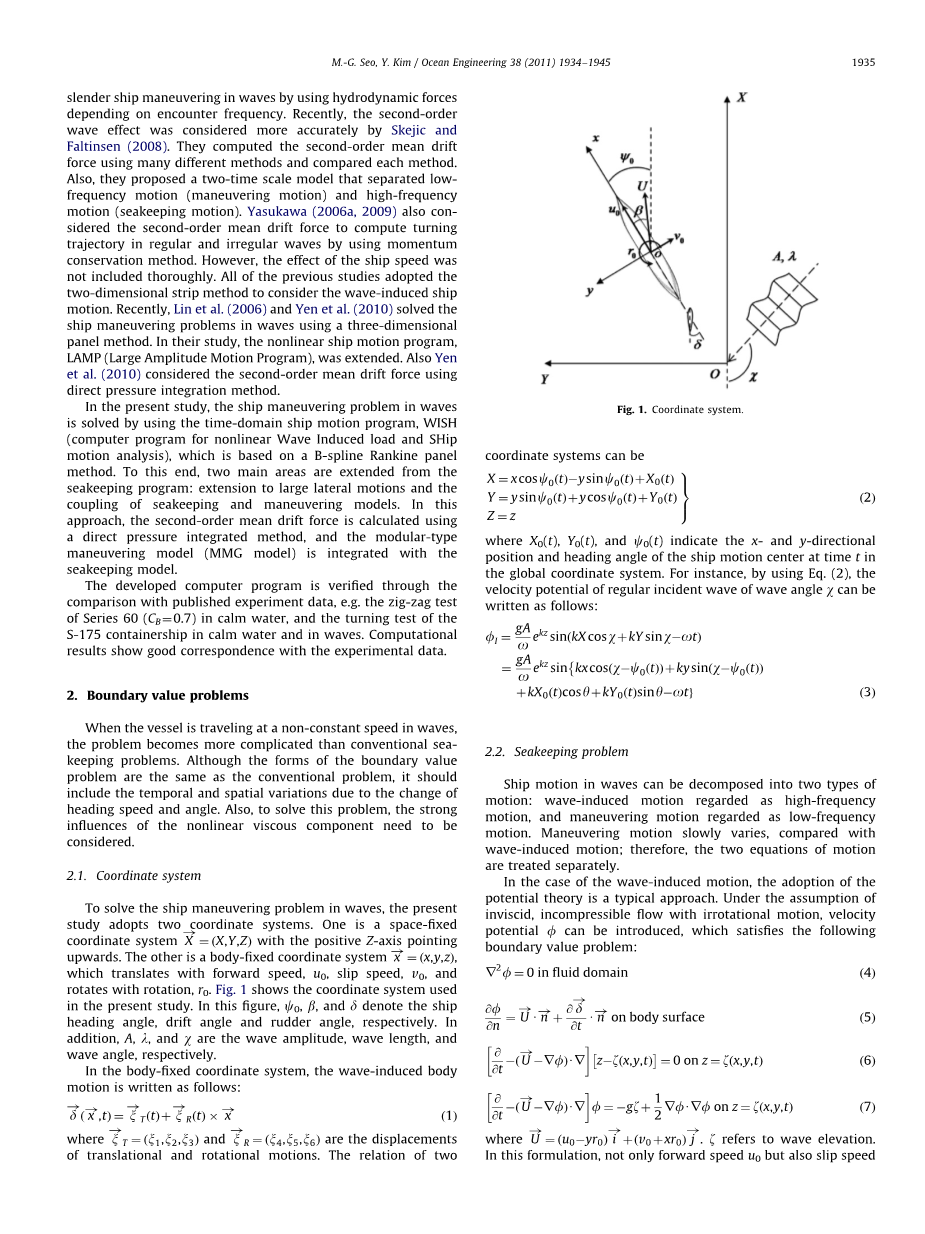
为了解决波浪中的船舶操纵问题,本研究采用两种坐标系。一个是空间固定坐标系=(X,Y,Z) ,Z轴正方向向上指向。另一个是运动坐标系。=(X,Y,Z)代表前进速度 代表滑移速度,旋转速度 回转半径,图1显示了本研究中使用的坐标系。在这个图中,psi;0,beta;和delta;分别表示船舶航向角,漂移角和舵角。此外,A,lambda;,chi;分别为波幅,波长和波角。 在运动坐标系中,波浪造成的船体运动写作如下:
(1)
其中 和 分别是平移和旋转运动的位移。
两个坐标系有如下关系:
(2)
其中, 和 表示全局坐标系中负x和负y的方向位置,以及船舶运动中心的航向角三者随时间t的变化关系。例如,通过使用公式 (2)波角chi;的规则入射波的速度势可以写成如下:
(3)
2.2耐波性问题
波浪中的船舶运动可以分解为两种类型的运动:被认为是高频运动的波浪引起运动和被视为低频运动的操纵运动。与波浪引起的运动相比,操纵运动缓慢变化; 因此,两个运动方程分别处理。在波浪引起的运动的情况下,采用潜在的理论是一种典型的方法。假设无粘性,不可压缩流动与非旋转运动,可以引入速度势phi;,使能够满足以下边界值问题:
流体域中 (4)
型表面上 (5)
(6)
(7)
其中 代表波高 ,在这个公式中,不仅考虑前进速度,而且考虑滑移速度和旋转速度。 此外,这些值的变化随时间的变化也应该被考虑
本研究采用Neumann-Kelvin线性化方法对边界值问题进行线性化。 总速度势phi;和波高xi;被分解如下:
(8)
(9)
其中-表示均匀的流动势。和分别是入射波速度势和波高。另外,和分别是干扰速度势和波高,线性边界条件采取以下形式:
(10)
(11)
(12)
其中(m1,m2,m3)= 0,(m4,m5,m6)=。 mi是所谓的m项,其包括稳定流动与不稳定流动之间的干扰影响。
应该指出,不同的线性化方法可以为上述边界值问题提供不同的解决方案。也就是说,两种线性化方法对于耐波性问题是常用的:Neumann-Kelvin线性化和双体线性化。Kim 2010年的研究显示,两种公式的结果可以是不同的,本研究采用Neumann-Kelvin线性化方法。船舶运动可以通过求解运动方程如下:
(13)
其中 是船的质量矩阵,并且分别是弗劳德 - 克里洛夫力,流体力 和恢复力。
2.3操纵性问题
在船舶操纵问题中,空间坐标系中考虑了4自由度运动。 对于这个问题,使用一组模块化方程,可以写成如下:
(14)
其中X,Y,K,N分别表示波浪,摇摆,深沉和偏航方向的分量,下标H.P和R分别表示船体,螺旋桨和舵上的流体动力。另外,下标W表示应从耐波性分析中得到的二阶平均漂移力。由于运动,转动,阻力等因素,船体所受到的力由线性和非线性两部分组成。船体力的一些部分是由上述潜在的理论决定的。船体所受力的其他部分可以从经验公式或模型试验中获得。尤其是螺旋桨和舵力可以从经验公式中获得。
3数值方法
通过使用时域Rank面板的方法解决耐波性问题。特别地,本研究集中在线性边界值问题。 为此,WISH程序以恒定的移动速度解决耐波性问题,扩展到船舶的侧向和旋转运动。WISH软件在几个大型造船机构的支持下由首尔国立大学开发,采用基于B样条函数的Rank面板方法(Kim等,2008; Kim和Kim,2010a)。
为了解决线性边界值问题,Green的第二次验证是通过离散边界面来应用的。 积分方程表示如下:
(15)
在本研究中,使用B样条基函数来近似沿流体边界的速度势,波高和法向通量。
(16)
其中表示B样条基函数 分别表示第j个离散化面板的扰动速度势,波高和法向通量。用等式 (16)等式 (10)和(15),可以获得自由表面上的速度势和型表面上的速度势的正常通量。然后可以通过求解方程11和12的微分方程来获得自由表面上的波高和速度势。
对于自由表面边界条件的时间积分,应用混合显隐式的欧拉方案。明确地求解运动学自由表面边界条件以获得扰动波高,同时隐含地求解动态自由表面边界条件以预测下一个时间步长中自由表面的速度势,即:
(17)
(18)
其中P和Q是强制函数,其包含自由表面边界条件中的所有其他项。 另外,可以通过应用多步时间积分方法来求解运动方程。本研究采用四阶预测校正方法。
通过应用人造波吸收区的概念来满足辐射条件。人造波吸收区分布在自由表面的截断边界周围,运动自由表面边界条件被修改为包括人造阻尼机构。在本研究中,Nakos(1993)使用的以下等式被引用:
(19)
其中v表示阻尼强度.
3.2操纵性问题
3.2.1船体力
方程14中定义了四个自由度运动的船体力, 可以以通用形式分解为
(20)
其中 由潜流导致的水动力,剩余的两项是粘性的影响。是船体升力, 是船体上的附加粘滞阻尼力。
这些力是常规机动方程的典型组成部分。例如,以下由Yasukawa(2006a)定义的形式:
(21)
这些项在20式中可以分为三个部分, , , , 和 与惯性力有关,这些项可以是的一部分。 和与波浪衰减和提升力有关, 这些项可以包含在和中。
在本研究中,通过使用WISH程序直接获得。 船体升力被建模为等效板上的提升力,即:
(22)
其中
全文共14432字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[143207],资料为PDF文档或Word文档,PDF文档可免费转换为Word



