智能船舶循迹控制方法研究与仿真毕业论文
2020-04-12 16:26:21
摘 要
如今陆地资源越发短缺,如何合理地开发与利用广阔海洋的丰富资源成为了全人类的共同话题。为了响应国家海洋强国的战略方针,开发更加先进的船舶技术与海洋设备已刻不容缓。智能船舶作为现代船舶业一颗闪耀的新星,集各先进功能于一身,正在被各国争相研究以在未来应用于开发海洋资源。我国也应紧跟时代的潮流,在智能船舶的研究上跻身世界前列。
本文针对智能船舶的循迹控制功能进行了研究,主要研究内容为:
(1)推导船舶六自由度运动数学模型,并将之简化为三自由度数学模型。针对环境力,将其分为风载荷、流载荷和浪载荷,给出具体估算方法。综合三自由度运动数学模型和环境力模型,推导状态估计中的船舶运动数学模型。
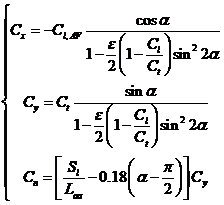
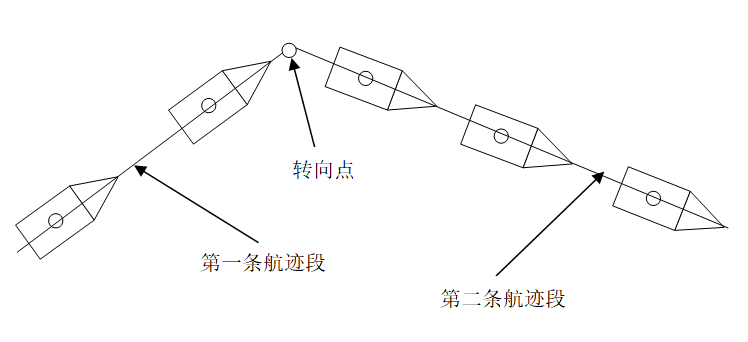
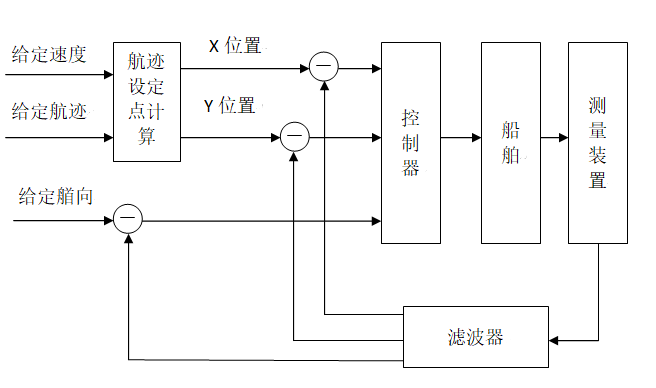
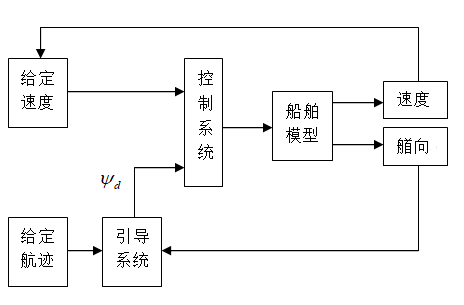
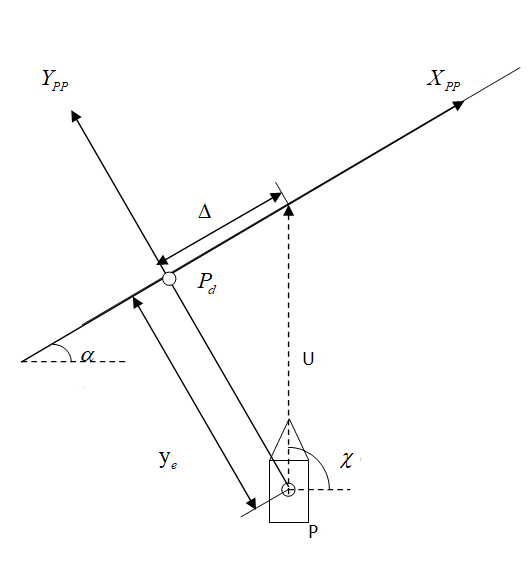
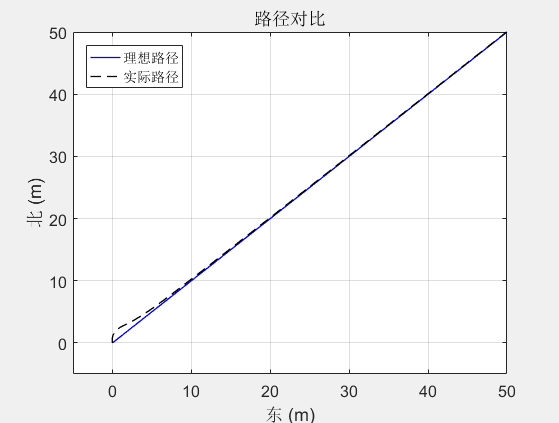
(2)针对循迹控制策略,进行了航迹规划、引导律和控制系统的研究。确定船舶沿直线段航行的仿真预期。推导LOS引导律,将之应用到循迹功能之中。采用PID控制法进行仿真,整体系统响应速度快,航向稳定性保持良好。证明了整体循迹控制方法的合理性。
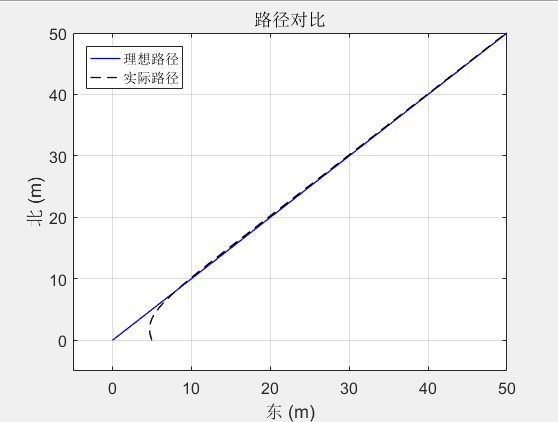
(3)对循迹控制系统进行数据处理,增加了高斯白噪声进行仿真。推导了扩展卡尔曼滤波法的原理,并应用到仿真之中。整体降噪效果良好,未影响系统响应速度。证明了扩展卡尔曼滤波法的有效性。
关键词:智能船舶,环境载荷,循迹控制,扩展卡尔曼滤波。
Abstract
Nowadays, there is a growing shortage of land resources. How to rationally develop and utilize the abundant resources of the vast ocean has become a common topic for all humanity. In order to respond to the strategic principle of the nation’s maritime powers, the development of more advanced ship technologies and marine equipment has become an urgent task. As a shining new star in the modern shipping industry,intelligent ships combine advanced functions into one and are being scrutinized by various countries to be applied to the development of marine resources in the future. China should also keep up with the trend of the times and rank among the top in the world in smart ship research.
This paper studies the tracking control function of smart ships. The main research contents are as follows:
(1) Derive the mathematical model of ship's six degrees of freedom movement and simplify it into a three-degree-of-freedom mathematical model. According to environmental forces, it is divided into wind load, flow load and wave load, and a specific estimation method is given. Integrating the three-degree-of-freedom mathematical model and environmental force model, the mathematical model of ship motion in state estimation is deduced.
(2) Research on track planning, guidance laws and control systems for tracking control strategies. Determine the expected simulation of the ship sailing along a straight section. Derive the LOS guidance law and apply it to the tracking function. Using PID control method for simulation, the overall system responds quickly and the heading stability remains good. The rationality of the overall tracking control method is proved.
(3) Perform data processing on the tracking control system and add Gaussian white noise for simulation. The principle of the extended Kalman filter is derived and applied to the simulation. The overall noise reduction effect is good and does not affect the system response speed. The effectiveness of the extended Kalman filter is proved.
Keywords: intelligent ship, environmental load, path following, extended Kalman filter.
目 录
摘要 III
Abstract IV
第1章 绪论 1
1.1研究背景与意义 1
1.2国内外现状 2
1.3研究内容 3
第2章 船舶运动数学模型 5
2.1坐标系统简述 5
2.2坐标转换关系 6
2.3船舶运动数学模型 7
2.3.1由动量定理推算船舶平移运动的三个方程 7
2.3.2由动量矩定理推算船舶旋转运动的三个方程 7
2.3.3三自由度运动模型 8
2.4环境力模型 9
2.4.1风载荷模型 10
2.4.2流载荷模型 12
2.4.3波浪载荷模型 13
2.5状态估计中的船舶数学模型 14
2.5.1低频运动模型 14
2.5.2高频运动数学模型 14
2.5.3测量模型 15
2.6本章小结 15
第3章 循迹控制模式 16
3.1引言 16
3.2循迹控制原理 16
3.3循迹控制策略 17
3.3.1航迹规划 17
3.3.2LOS引导律设计 18
3.4仿真及分析 20
3.5本章小结 22
第4章 循迹控制系统 23
4.1引言 23
4.2PID控制原理 23
4.3 PID控制器设计 25
4.4仿真及分析 26
4.5本章小结 32
第五章 扩展卡尔曼滤波 33
5.1引言 33
5.2非线性运动数学模型 33
5.3扩展卡尔曼滤波 34
5.4仿真结果 37
5.5本章小结 42
第六章 总结与展望 43
6.1全文工作总结 43
6.2工作展望 43
参考文献 45
致谢 47
第1章 绪论
1.1研究背景与意义
海洋占据着地球71%的面积,属于人类开发较少的领域。为了应对新时代的资源短缺,考虑长远的发展战略,各国正不断加大对海洋资源的探索与利用。近年来,高性能、高科技海洋设备正不断被研发。
在经济全球化的带动下,海上贸易线路不断增多,矿产资源运输量持续走高,交易量不断加大,其带来的污染与成本也在不断上涨[1]。出于通过船舶智能化降低船舶控制和管理难度,减少人为误操作,提高设备及船舶营运的安全,优化船舶航行,控制燃油消耗、降低成本,提高收益等目的,智能船舶的研究已在全球范围内开展。智能船舶作为其中一颗冉冉升起的新星,正在为全人类海洋资源的开发起着越发关键的作用。
智能船舶分为六大功能模块:智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台,是在大数据、信息物理系统、物联网等技术推动下发展起来的,成为集多种自动化系统为一体的多功能综合系统,提高了船舶航行的安全性、经济性以及管理效率[2]。
面对现阶段的海洋科技革命,中国作为海洋大国应积极响应时代的号召,在船舶智能化的道路上不断实现突破与超越。
智能船舶可分为四个发展阶段:
(1)仅限于船用设备状态远程监控和数据分析;
(2)利用云计算、物联网和大数据分析等技术,通过连接岸上中心为船舶定时提供安全、环保和能效优化建议,实现半自动化航行[3];
(3)在船舶数据分析的基础上,加入港口物流信息,实现船岸信息间的无缝衔接,实时动态地完成航行、船期和港口操作等的优化[4];
(4)将实现全自动化无人驾驶和港口自动化装卸与物流。
当前的智能船舶正处于由第一阶段向第二阶段过渡的阶段,还有很长的道路需要探索。
智能船舶方面的研究能带来极大的收益:
(1)能大幅度提升智能船舶的研究地位,开发速度;
(2)带来更加优化的控制方法及滤波技术;
(3)进一步提升智能船舶的精确控制方法,进而实现数值仿真优化和新一代模型实现。为智能船舶进一步发展打下基础。
(4)工程应用更加广泛,生产生活更加便利,使我国拥有更多自主知识产权。同时也为中国海洋强国之路添砖加瓦,对维护我国海洋主权做出贡献。
现阶段船舶自动化程度并没有满足人们追求船舶智能化的渴望,离人们心中具有自动感知、主观分析、智慧操作的船舶还有一定差距。在六大功能模块中,我国的发展水平稍显落后于其他海洋强国。因此,我国智能船舶的研究工作需进一步加强[5]。
本文将针对智能船舶六大功能模块中的智能航行模块进行研究,并着力在循迹控制方向进行方法研究与仿真工作。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: