智能船舶的自主编队控制方法研究与仿真毕业论文
2020-02-15 20:27:25
摘 要
近年来,随着传感器、通信、物联网、互联网等技术的发展,船舶智能化已逐渐成为未来船舶的发展目标。其中,智能船舶的自主编队控制已逐渐成为船舶行业的热门研究课题之一。船舶编队在军用和民用方面都具有广阔的应用前景,如舰队协同作战、海上安全巡逻、资源探测、环境监测等。由于船舶所承担的任务越来越复杂,单一船舶的能力愈显不足,多船形成编队协同作业的优势不断被凸现出来。相比于单船,多船协作组成的编队系统对环境的适应能力更强,完成任务的效率更高,同时,不同类型的船舶协作也将使系统的容错性增强,保证编队系统安全顺利地进行海上作业。因此,智能船舶的自主编队控制研究是一个非常有实用性的研究课题。
本文将以三艘欠驱无人船为研究对象,并基于“领导者-跟随者”的编队控制方法,将自主编队航行分为两部分:第一部分是通过循迹控制使领导者按预期航迹航行;第二部分是根据“领导者-跟随者”编队结构建立船队系统模型,据此进行跟随者的控制器设计,使其与领导者保持期望的相对位置,实现编队队形。本文的主要研究内容如下:
首先,在固定坐标系和运动坐标系下建立欠驱船舶的三自由度运动学模型和动力学模型。同时,考虑到船舶实际运动环境中的风浪流的影响,对风浪流载荷进行建模,建立了风浪流外载荷干扰下的欠驱船舶的动力学模型和运动学模型。
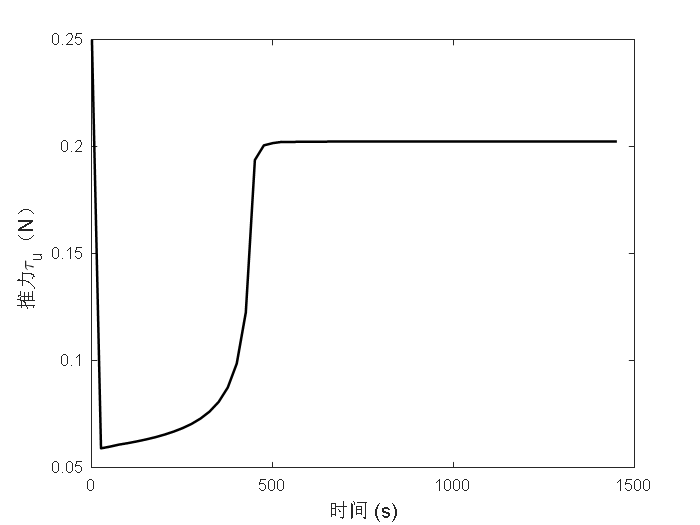
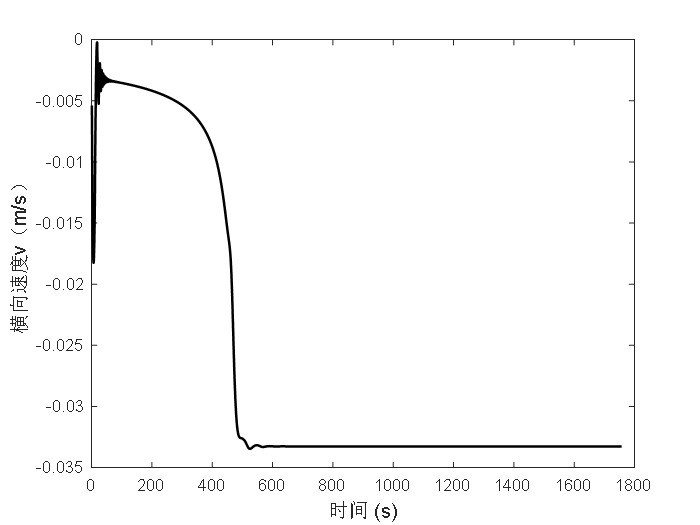
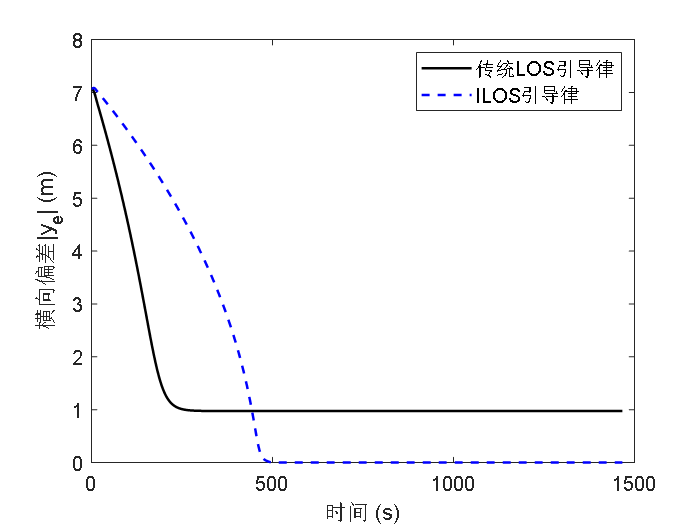
其次,针对传统LOS引导律在环境干扰下存在横向偏差的问题,引入了ILOS引导律。通过在传统LOS引导律的基础上加入积分项,使横向偏差尽可能趋近于零,并且使控制器参数的选取也更加简便和灵活。最后通过仿真实验验证ILOS引导律的有效性。
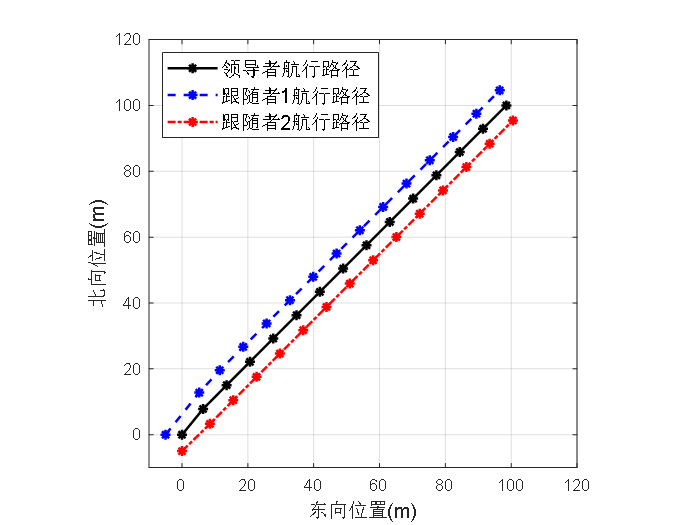
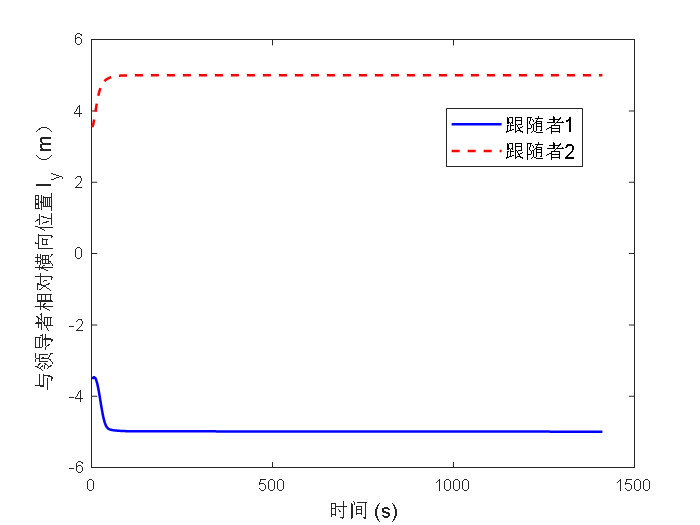
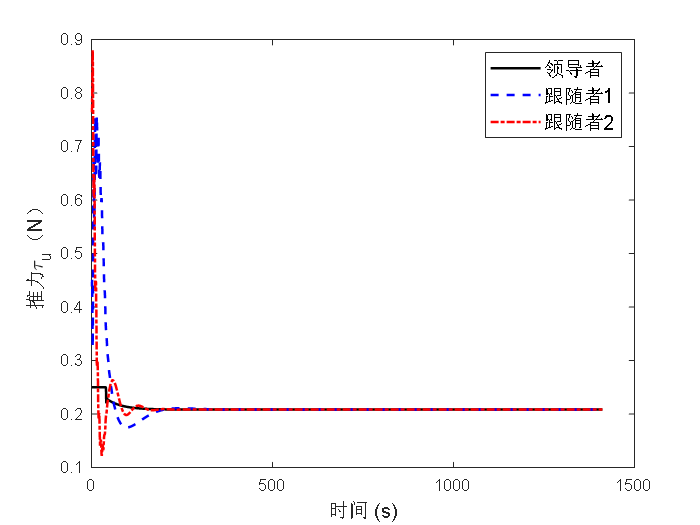
最后,基于“领导者-跟随者”编队控制方法,建立编队控制模型,并结合李雅普诺夫稳定性和PID控制理论,完成跟随者的控制器设计。通过仿真实验验证了控制器的有效性。
关键词:欠驱船舶;LOS引导律;循迹控制;编队控制
Abstract
In recent years, with the development of sensor, communication, Internet of things, Internet and other technologies, ship intelligence has gradually become the development goal of future ships. Among them, autonomous formation control of intelligent ships has gradually become one of the hot research topics in the shipping industry. Marine formations have broad application prospects in both military and civil fields, such as fleet cooperative operations, maritime security patrols, resource detection and environmental monitoring. As the tasks undertaken by ships become more and more complex, the capability of a single ship becomes more and more insufficient, and the advantage of multiple ships forming a formation for collaborative operation is constantly highlighted. Compared with a single ship, the formation system composed of multiple ships has stronger adaptability to the environment and higher efficiency in completing tasks. At the same time, the cooperation of different types of ships will enhance the fault tolerance of the system and ensure the formation system to conduct offshore operations safely and smoothly. Therefore, the autonomous formation control of intelligent ships is a very practical research topic.
Based on leader-follower formation control method, this paper divides the autonomous formation navigation into two parts. The second part is based on the 'leader-follower' formation structure to establish the fleet system model, according to which the follower controller design, make it and the leader to maintain the desired position, to achieve the formation. The main research contents of this paper are as follows:
Firstly, three degrees of freedom kinematics model and dynamics model of underactuated ship are established in fixed coordinate system and motion coordinate system. At the same time, considering the influence of the wind and wave flow in the actual motion environment of the ship, the model of the wind and wave flow load is built, and the dynamic model and kinematics model of the underdriven ship under the disturbance of the external load of the wind and wave flow are established.
Secondly, ILOS guidance law is introduced to solve the problem of lateral deviation of traditional LOS guidance law under environmental interference. By adding integral terms on the basis of the traditional LOS guidance law, the lateral deviation is as close to zero as possible, and the selection of controller parameters is more convenient and flexible. Finally, the validity of ILOS guidance law is verified by simulation experiment.
Finally, based on leader-follower formation control method, formation control model is established, and the follower controller design is completed by combining Lyapunov stability and PID control theory. The effectiveness of the controller is verified by simulation experiments.
Key Words: Underactuated vessel; LOS guidance law; Tracking control; Formation control
目 录
第一章 绪论 1
1.1 研究背景及意义 1
1.2 船舶编队控制研究现状分析 2
1.2.1 编队协调控制体系 2
1.2.2 船舶编队控制发展现状 3
1.3 本文的主要内容 5
第二章 欠驱船舶数学建模 6
2.1 引言 6
2.2 欠驱船舶建模 6
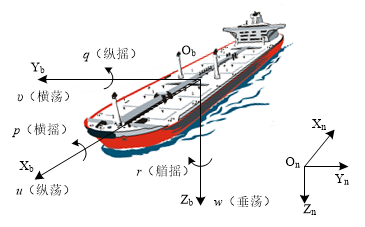
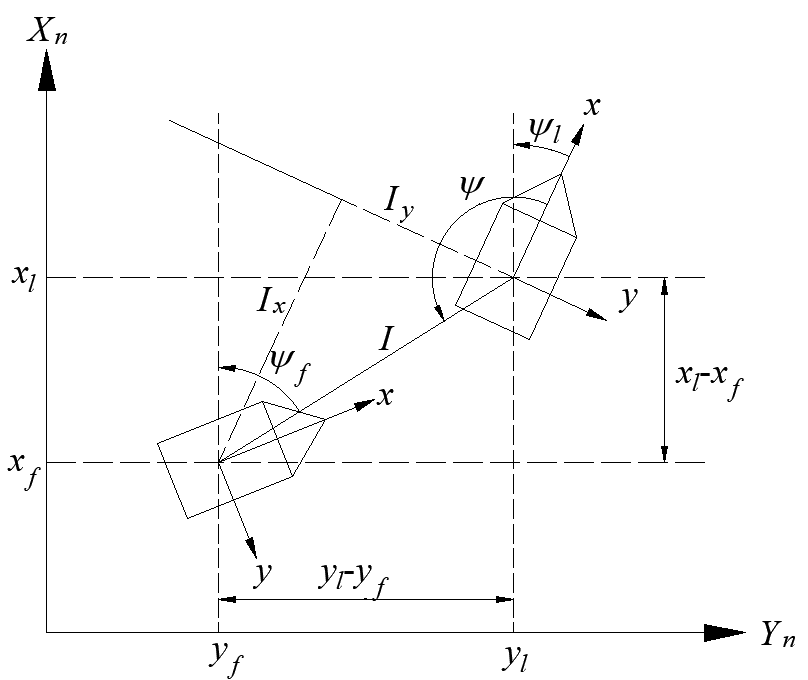
2.2.1 参考坐标系 6
2.2.2 欠驱船舶的运动学模型 8
2.2.3 欠驱船舶的动力学模型 8
2.3 环境力模型 9
2.4 本章小结 12
第三章 基于ILOS的欠驱船舶自主循迹 13
3.1 引言 13
3.2 LOS引导律 13
3.2.1 传统引导律 13
3.2.2 ILOS引导律 15
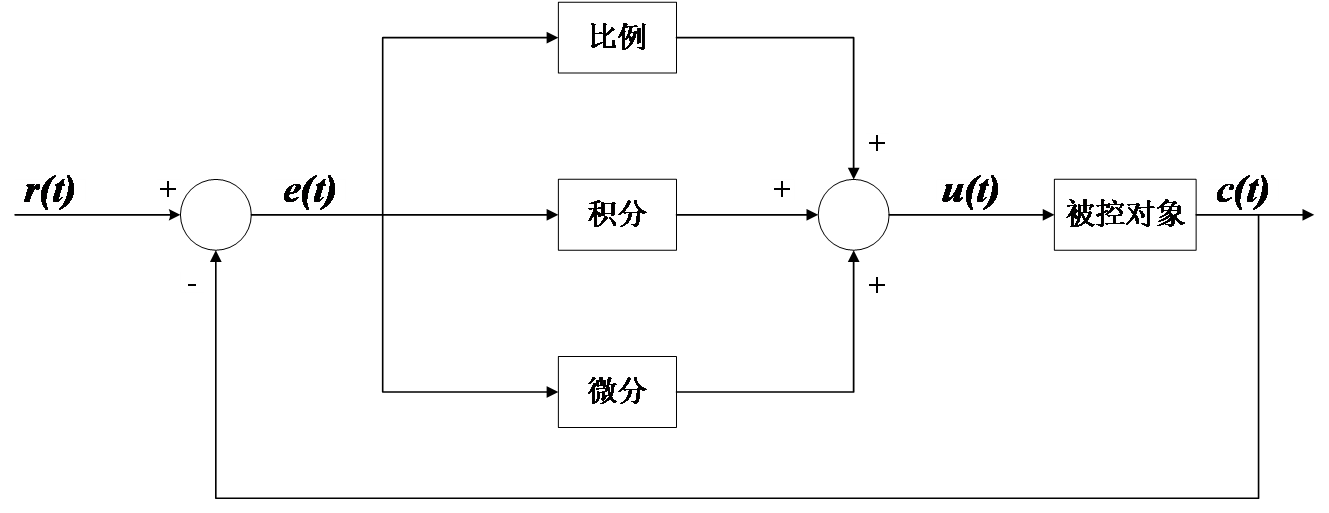
3.3 控制器设计 16
3.4 仿真实验与结果分析 17
3.4.1 仿真条件 17
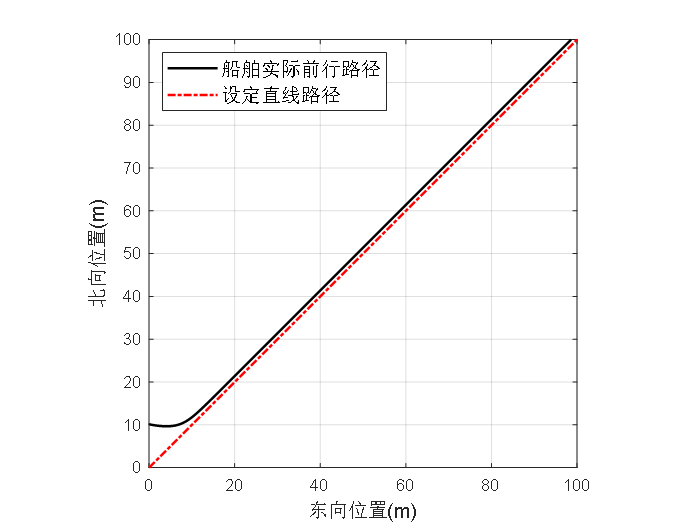
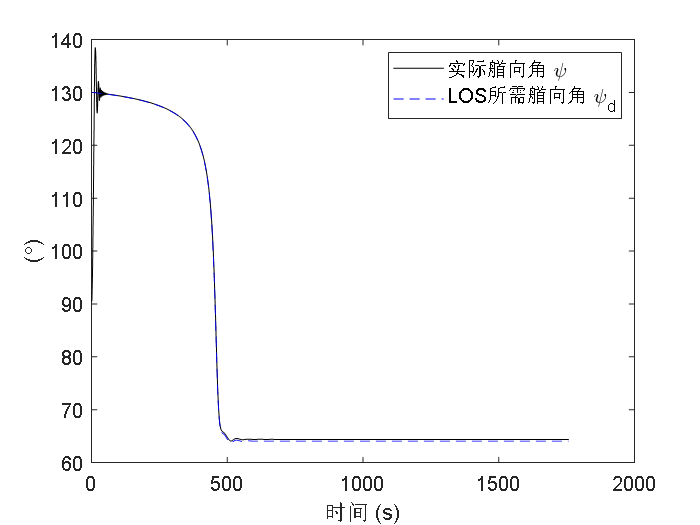
3.4.2 仿真结果与分析 18
3.5 本章小结 22
第四章 基于领导者-跟随者的欠驱船舶编队控制 23
4.1 引言 23
4.2 船舶编队系统建模 23
4.2.1 单船的运动学和动力学模型 23
4.2.2 “领导者-跟随者”船舶编队系统建模 24
4.2.3 编队控制目标 26
4.3 控制器设计及稳定性分析 27
4.3.1 运动学控制器设计 27
4.3.2 动力学控制器设计 28
4.4 仿真实验与分析 29
4.4.1 仿真条件 29
4.4.2 仿真结果与分析 30
4.5 本章小结 35
第五章 总结与展望 36
5.1 工作总结 36
5.2 工作展望 36
参考文献 38
致 谢 41
第一章 绪论
1.1 研究背景及意义
海洋蕴藏着丰富的自然资源,同时也是全球贸易的重要通道,是人类赖以生存和发展的重要战略空间。随着人类对能源的需求不断增大以及经济全球化发展,海洋对人类文明的发展也越来越重要。我国拥有辽阔的海域,海洋资源丰富,海洋空间利用开发潜力较大。在中共十八大会议上,政府提出了海洋强国战略,开创了新世纪中国海洋经济科学发展新纪元[1]。
人类为了利用海洋中的丰富资源以及进行全球贸易往来,发明出了船这一交通工具来从事海洋活动。随着人类对运输需求量的不断增大,船也从最初的木质帆船逐渐演变成排水量数十万吨的钢铁巨轮。在现代交通运输系统中,水路运输由于运输能力大、成本低,在交通运输中发挥着越来越重要的作用。但是,随着船舶数量的迅速增长和航线越来越繁忙,水路运输中存在的安全性低、效率低、环境污染严重、劳动力成本高等问题越来越受到人们的重视。近年来,信息、计算机通信、网络、新能源、人工智能、物联网、大数据、集成桥系统和信息物理系统等应用等技术的发展,极大地推进了船舶智能化进程,使实现真正安全、高效、绿色和无人驾驶的智能船舶成为可能[2]。
智能船舶是指利用传感器、通信、物联网、互联网等技术手段自动感知和获取船舶本身海洋环境、物流、港口等的信息和数据。该船基于计算机技术,自动控制技术和大数据处理分析技术,可实现船舶航行、管理、维护、货物运输等方面的智能操作。使船舶更安全、更环保、更经济和更可靠。 这里的“智能”可以理解为“思考”,它可以全面地考虑具体任务和获得的各种信息。制定一系列满足船舶安全,经济和环境要求的最佳决策。 其中,智能航行是智能船舶最重要的基础功能之一。智能航行是指利用计算机技术,控制技术等来分析和处理感知和获取的信息,并设计和优化船舶的路线和速度;在可行的情况下,通过岸基支撑中心,船舶可以实现在开阔水域,狭窄水道和复杂环境条件下的避障,实现自主航行[3]。
近年来,随着船舶运动控制领域计算机,通信,导航等技术的飞速发展,船舶编队在军事和民用领域具有广泛的应用场景。相比于单船,多船协调具有许多潜在优势:可以提高执行某项作业的效率;可以完成某些复杂的,单船无法完成的海上任务[4-5];通过延长船舶在空中执行任务的持续时间,有效地增加船的作战半径减少船舶对岸基安全的依赖,提高长途船的生存能力,确保战斗舰继续具有战斗力;与船舶在港口的对接相比,它花费的时间更少,成本更低[6]。当补给船执行任务时,它将把供应船上的各种生存材料如燃料和淡水转移到补给船上,两艘船需要保持固定的距离。并以并列形式或成一字队形执行循迹作业[7-8]。此外,舰队协同作战、自动牵引作业、环境监测[9]等作业需要多艘船之间相互协调,共同完成某些复杂的海上任务。多艘船组成编队协调作业可以增强整个系统的鲁棒性和容错性,使船编队在面对复杂的海洋环境时也能安全顺利地完成海上作业[10]。所以研究智能船舶的自主编队控制具有很大的实际使用价值。
1.2 船舶编队控制研究现状分析
1.2.1 编队协调控制体系
船舶编队系统的组成并不是系统中每个个体的简单叠加,还包含了体系中每个个体之间的相互作用。编队控制是指多个独立的个体通过相互交换信息来保持期望的队形,同时满足任务、环境约束的控制技术,编队控制中最基本的问题就是队形的建立和保持[11]。编队协调控制体系在控制结构上可以分为集中式控制体系、分布式控制体系和分散式控制体系。
(1)集中式控制体系
集中式控制是指在欠驱船编队体系中选择某一个个体,将其视作编队控制体系的主控单元。主控获取编队体系中其它个体的全部信息,将获得的信息整合后传给编队体系中的其他个体,其它个体据此做出相应的控制调整,最终实现编队控制。这种控制结构的优点是结构简单、易于实现、协调效率高。缺点是这种控制结构要求主控单元不能出现故障,因为当主控单元出现问题后,将导致整个编队系统瘫痪,容错率较低。此外,当编队中的其它个体数量较大时,这样一来需要交互的信息量将会很大,会给主控单元带通信和因信息整合带来的巨大计算负担。如果信息交互的数量过多,可能导致编队不能形成。
(2)分布式控制体系
在分布式控制体系中,不存在主控单元,船舶编队中的每个个体都可以获取自身周围其他编队个体的状态信息,例如两船之间的相对速度、相对位置,通过所设计的控制律完成编队运动。因为编队个体之间可以相互通信进行信息共享,因此该方法有更好的灵活性、操作性和容错性,能很好地适应情况多变的环境。分布式控制体系的缺点是由于体系中的个体具有局限性,难以获取全局的最优控制策略,将导致整个系统的协调性较集中式低。
(3)分散式控制体系
分散式控制体系是分布式和集中式相结合的控制体系。该控制体系将分布式控制体系和集中式控制体系的优点相结合,提高了编队体系中每个个体的协调能力,同时降低了系统对中处理单元的依赖性,提升了系统的局部信息处理能力和整体的反应能力,具有良好的容错性、灵活性和鲁棒性。
在实际工程应用中,需要根据编队规模的大小和实际的运用环境灵活地选择和应用不同的控制体系。例如,当编队规模较小时可以选择集中式控制体系,增强编队的协调性;当编队规模较大时可采用分散式控制体系,将编队按任务需求划分为不同的小组,小组内采用分布式控制体系,而不同的小组之间集中管理可以改善协调性;当编队任务较复杂时可以选择分布式控制体系,以提高编队灵活性和协调性[12]。
1.2.2 船舶编队控制发展现状
自20世纪80年代以来,对船舶编队控制技术的研究已有了30多年的历史,常见的船舶编队控制方法有基于“领导者-跟随者”的编队控制、基于虚拟结构的编队控制、基于图论的编队控制和基于行为的编队控制[13]。随着信息、计算机通信、网络、新能源、人工智能以及物联网、大数据、集成桥系统和信息物理系统的应用等技术的发展,对船舶编队控制问题的研究也越来越受到重视。
(a)基于“领导者-跟随者”的编队控制
基于“领导者-跟随者”的编队控制方法的基本思想是将编队中的一个或多个个体定义为领导者。其余的被指定为跟随者,跟随者跟踪领导者的轨迹以实现整体编队运动。应用“领导者-跟随者”方法,可以简化编队控制律,设计跟随者跟踪领导者的轨迹控制律,从而达到编队控制的目的[13]。Kumar教授的Grasp团队对“领导者-跟随者”方法做出了卓越的贡献。Kumar教授的Grasp团队在“领导者-跟随者”编队控制方面做了大量的理论和实验基础工作,包括:提出了𝑙-𝜓和𝑙-𝑙两种跟随领航者的编队模式,并利用反馈线性化方法设计了编队控制律并证明其渐近稳定性[14];建立了基于𝑙-𝜓和𝑙-𝑙控制的多智能体编队控制图,实现了多智能体任意队形的切换[15-16];还设计了基于全方位视觉的多机器人编队和编队切换验证实验,提出了合作跟随领航者法,使跟随者的运动不仅受领导者影响,还受其它智能体(如自身的跟随者)的影响[17-18]。近年来,国内外也有其他学者对“领导者-跟随者”方法进行了大量的研究工作。刘杨等将“领导者-跟随者”编队控制和神经网络稳定自适应跟踪控制相结合,设计了自适应控制律,并证明了其稳定性,使编队控制系统跟踪误差一致最终有界[19];Kyrkjeboslash;等采用“领导者-跟随者”方法,研究了在航补给过程中受补给船和补给船之间的协同控制[20]。李芸等利用势函数方法现了领导者和跟随者之间的相互协调控制,并提出了一种改进后的“领导者-跟随者”方法,提高了队形稳定性,并结合滑模理论和图论,提出了一种新的编队控制律,用于队形保持[21];刘杨等基于“领导者-跟随者”方法设计了协同控制器,使得船舶之间可以形成任意队形[22];Khoshnam根据“领导者-跟随者”方法,结合径向基函数神经网络来进行适应逼近,来抵抗风浪干扰对船舶运动造成的影响,并维持船队的稳定性[23]。
(b)基于虚拟结构的编队控制
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: