福建大使澳渔港直立式式防波堤设计外文翻译资料
2021-12-27 22:27:28
英语原文共 6 页
就像涡轮转子上的风力载荷或平台上的海流载荷一样,平均漂移力会导致支撑平台相对于其固定位置的平均偏移。对于柔性浮式系泊系统,系泊系统的阻力通常与其位移呈非线性关系,因此,平均漂移力对系泊系统的载荷和阻力的影响在某些设计中可能是很重要的。二阶慢漂移力是由多个频率不同的入射波分量之间的差异引起的,在经典海洋流体力学问题的线性公式中也被忽略了。平均和慢漂移力对于在小吃水、大水面面积和对浪涌和摇摆几乎没有阻力的系泊系统配置的支撑平台上的波浪引起的载荷是很重要的,例如在有悬链线系泊线的驳船设计中。同样地,在我的线性问题中也忽略了二阶和频激发,它是由多个不同频率的入射波的分量求和引起的。二阶和频激励在分析具有强抗升沉系泊系统的支撑平台(如 TLP 设计)的振铃行为时有重要作用。
在我的模型中,我也忽略了来自海流引起的涡激振动 (VIV) 的潜在负载。当 VIV 频率接近系统的固有频率时,就会出现一种被称为锁定的共振现象。已知 VIV 对某些设计的稳定性至关重要。同时也忽略了海流对辐射和衍射问题的附带影响,如多普勒频移效应 22。最后,我忽略了来自漂浮的碎片或海冰的潜在负荷。如果在有海冰的地方使用支撑平台,海冰可能是一个重要的负荷来源。在美国大陆,在设计安装在五大湖的海上风力涡轮机支撑平台时,这可能特别令人关注。同时指出,经典的海洋流体动力学问题是利用非定常势流理论推导流体运动的控制方程。这个理论假定流体是不可压缩、无粘性的,并且只受到保守的体力(即重力)作用,而且流动是无旋的。
2.3 支撑平台运动学和动力学建模
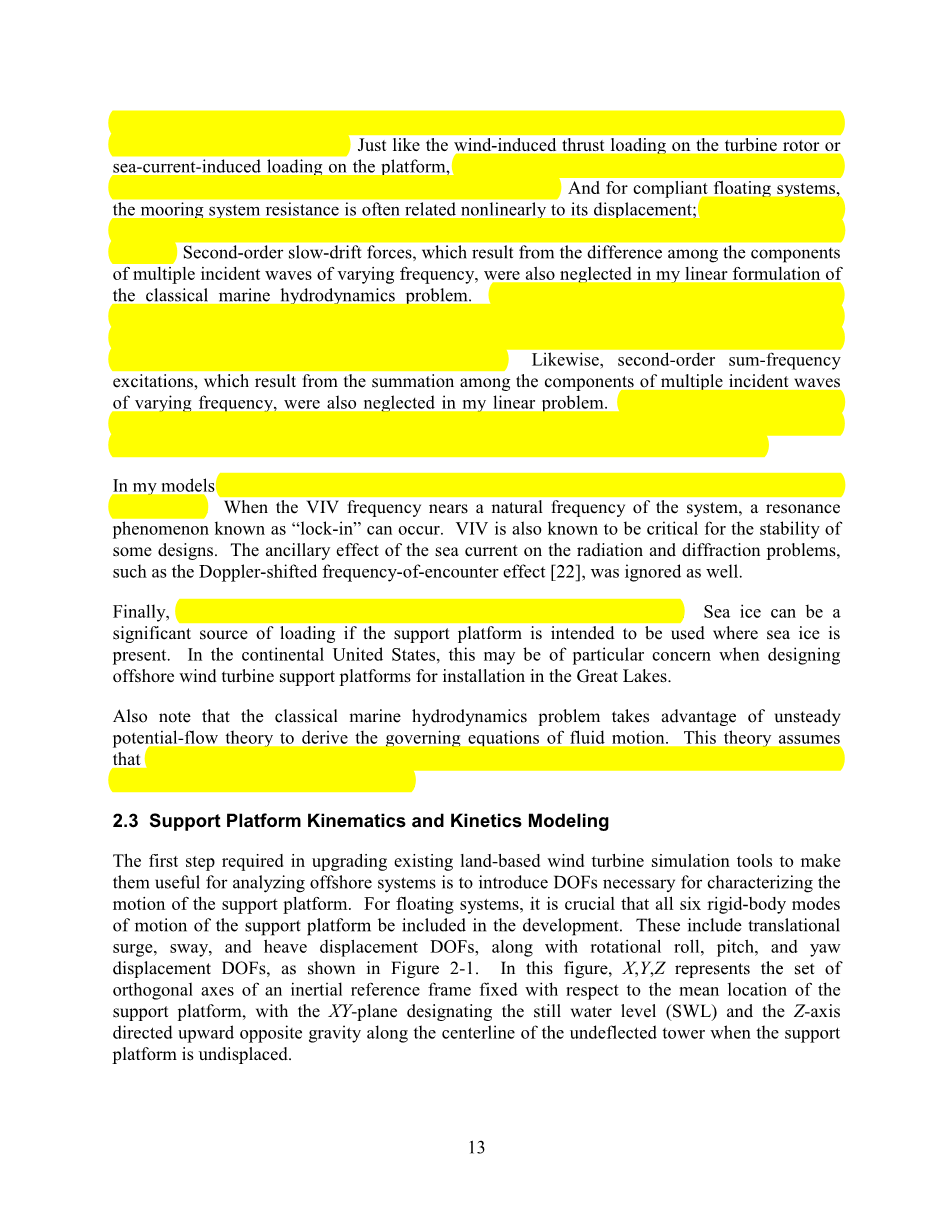
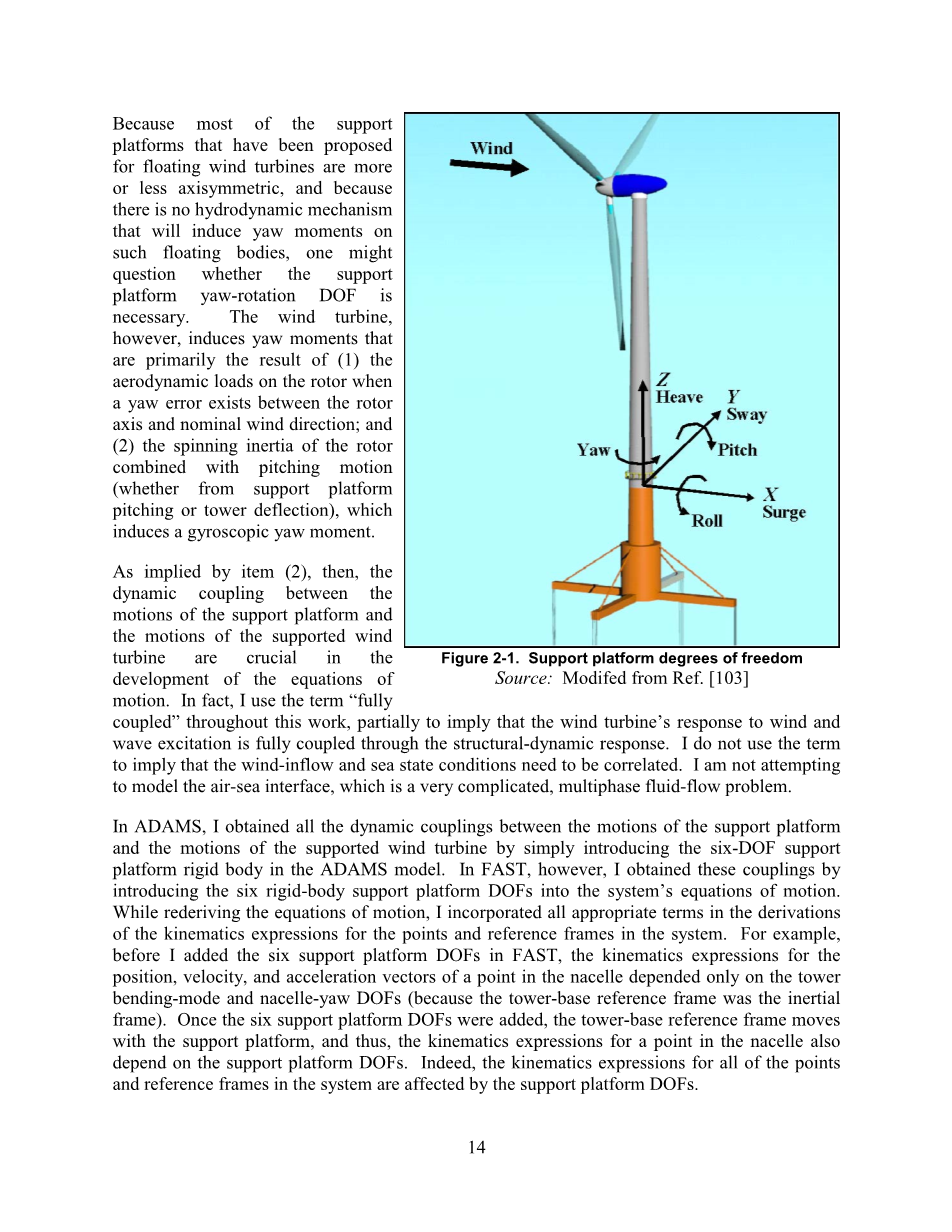
升级现有陆基风电机组模拟工具使其对离岸系统分析有用所需的第一步是引入表征支撑平台运动所需的 DOF。对于浮动系统,关键是支持平台的所有六个刚体运动模式都包括在开发中。如图 2-1 所示,其中包括平移冲击、摇摆和垂荡位移 DOFs,以及旋转滚转、俯仰和偏航位移 DOFs。在该图中,X、Y、Z 表示相对于支撑平台平均位置固定的惯性参考框架的正交轴,XY 平面表示静止水位 (SWL),Z 轴在支撑平台未发生位移时沿着未偏转塔的中心线向上相对重力。
由于大多数为浮力风力涡轮机设计的支撑平台或多或少是轴对称的,而且由于没有流体动力机制会在此类浮体上产生偏航力矩,人们可能会质疑支撑平台偏航旋转自由度是否必要。然而,风力涡轮机产生偏航力矩的主要原因是 (1) 当转子轴和标称风向之间存在偏航误差时转子上的空气动力载荷;和 (2) 转子的旋转惯量与俯仰运动(无论是来自支撑平台俯仰还是塔偏转)相结合,这将产生陀螺偏航力矩。
因此,如第 (2) 项所示,支撑平台的运动与所支撑的风力机的运动之间的动态耦合在运动方程的发展中是至关重要的。事实上,我在整个工作中使用完全耦合这个术语,部分地暗示了风力涡轮机对风浪激励的响应是通过结构-动力响应完全耦合的。我不用这个词来暗示风的流入和海况需要相互关联。我不是试图模拟海-气界面,这是一个非常复杂的,多相流动的问题。
在 ADAMS 中,通过在 ADAMS 模型中简单引入六自由度支撑平台刚体,得到了支撑平台运动与被支撑风机运动之间的所有动态耦合。然而,在 FAST 中,我通过将六个刚体支撑平台 DOF 引入到系统的运动方程中获得了这些耦合。在重新推导运动方程时,我将所有适当的术语合并到系统中点和参考系的运动学表达式的推导中。例如,在我在 FAST 中添加六个支撑平台 DOF 之前,机舱中点的位置、速度和加速度矢量的运动学表达式仅依赖于塔式弯曲模式和机舱偏航 DOF(因为塔基参考框架是惯性框架)。当六个支撑平台自由度相加后,塔基坐标系随支撑平台移动,因此,吊舱内某点的运动学表达式也依赖于支撑平台自由度。事实上,系统中所有点和参考系的运动学表达式都受到支持平台 DOF 的影响。
假设支撑平台的所有旋转都很小,则旋转顺序变得不重要。因此,当我在 FAST 中推导和实现运动方程时,我可以避免使用欧拉角(或类似的)的所有复杂性,其中旋转的顺序是重要的。将 x,y,z 作为参考框架的轴,参考框架的轴是由涉及绕原始参考框架 x,y,z 的轴的三个正交旋转 (1,2,3) 的变换产生的。使用正弦和余弦函数的一阶小角度近似,并忽略泰勒级数展开中的高阶项,将原始和变换后的参考框架联系起来的标准欧拉角变换简化为
在这个方程式中,近似符号(asymp;)被用来代替等号(=),因为当使用小角度近似时,产生的变换矩阵不是超过一阶的正交矩阵。这意味着转换后的参考框架不是由一组相互正交的轴组成的。(所有相互正交轴集相关的变换矩阵必须为正交。)因为使用不相互正交的轴会导致在动态响应计算中传播的不准确,所以我调用了 Eq. (2-1) 中的转换矩阵的校正,以确保它保持正交。从矩阵理论中,我知道最接近于给定矩阵的正交矩阵,在 Frobenius 范数意义下,是 〖U〗〖V〗T,其中 〖U〗 和 〖V〗 是给定矩阵的奇异值分解 (SVD) 中固有的特征向量矩阵,符号 T 代表矩阵转置。通过执行这些操作,发现正确的转换表达式为
证明方程 (2-2) 中的变换矩阵是超过一阶项的正交矩阵是一个微不足道的练习。
当应用于支撑平台时,x、y、z 代表支撑平台内身体固定参考框架的一组正交轴,theta;1、theta;2、theta;3 是支撑平台相对于惯性参考框架轴的滚动、俯仰和偏航旋转(即 x、y、z)。x、y、z 的原点称为平台参考点,是平台中支撑平台 DOF位置的定义。这也是支撑平台上施加外部载荷的点。
应用等式 (2-2) 时,使用 x,y,z 和 x,y,z 的类似标签,以将偏转刀片(或塔架)的元素定向的参考框架与固定在刀片(或塔架)根部的参考框架相关联。在这种情况下,旋转是刀片(或塔架)元素的翻板、滞后和扭转斜率。
在 FAST 中,我实现了 Eq. (2-2),而不是 Eq. (2-1),用于与支撑平台和惯性框架相关的所有转换、与偏转塔元件和塔基相关的所有转换以及与偏转叶片元件和叶片根部相关的所有转换。尽管这里没有显示这些结果,但我已经证明了在 FAST 中加入方程 (2-2) 而不是方程 (2-1) 导致的动态响应与从 ADAMS 获得的响应更加一致,ADAMS 使用欧拉角,尤其是角度量级增加时。当用方程 (2-2) 代替方程 (2-1) 时,动态响应更准确,因为当确定子系统远离惯性框架的负载路径方向时,例如在塔架或叶片元件中,这种变换矩阵成列。单个转换矩阵中的错误在一起相乘时会复合。如果风力涡轮机非常坚硬,就没有必要修正了。
当任意角度大于 20 时,方程 (2-2) 的变换表达式仍然失去相当大的精度。然而,该阈值应足以支持适用于浮动风力涡轮机的平台设计,因为 (1) 浮动平台必须足够稳定,以便维护人员能够定期访问;和 (2) 风能捕获与转子盘垂直于风向的扫掠面积成比例。(这个投影面积随着支撑平台的角位移增加而大大减少,特别是在俯仰时。)
我用 Kane 的 dynamics 推导了 FAST 中使用的运动方程。根据牛顿运动定律的直接结果,可将具有 P 个广义坐标 (DOFs) 的简单完整系统的 Kane 运动方程表述如下:
其中,对于由参考系 Nr、质量、mr 和 CM 点 Xr 表征的一组 W 刚体,广义主动力 Fi 为
广义惯性力Fi*,是
在这些方程中,假设对于每个刚体(体 Nr),分别在 CM 位置(点 Xr)应用三分力和力矩向量 FXr 和。点 Xr 的三分量加速度矢量由惯性系(E 系)中刚体 Nr 的角动量(关于 Xr)的第一次导数由三分量矢量 r NM rXE ar NE H 给出。三分量矢量和分别表示惯性系中厘米点 Xr 的偏线速度和刚体 Nr 的偏角速度。符号 r XE rv rN Er-表示向量点积。
虽然这是一个漫长而乏味的过程,但我在推导快速系统的运动方程时并没有特别的困难(我在这里没有介绍)。首先,我推导出系统中所有关键点和参考系的位置、速度和加速度矢量的运动学表达式,考虑了我之前描述的所有适当 DOF。当相对于适当的参考框架表达术语时,这些派生是可管理的,利用像 Eq 这样的转换关系。(2-2)。例如,假设塔悬臂到支撑平台上,就可以相当直接地写出塔元素相对于支撑平台的角速度的表达式。塔体单元的绝对角速度就是塔体相对于支撑平台的角速度和支撑平台相对于惯性框架的角速度的矢量和。支持平台相对于惯性框架的角速度,反过来,只是第一时间的滚动、俯仰和偏航自由度的矢量和。
导出运动学表达式后,我建立了 Kane 的动力学所使用的偏速度向量。结合广义主动力和广义惯性力的表达式,建立了风力机与支撑平台耦合系统的动力学方程,并系统地导出了完整的非线性时域运动方程。
平台的动力学方程包括平台质量和惯量、重力、流体力学和系泊系统的反应载荷。我使用了一个假设支撑平台的 CM(不包括风力涡轮机)沿着未偏转塔的中心线定位的实现;该模型中包括支撑平台的一个点质量和所有三个主要惯性(滚动、俯仰和偏航)。通过适当调整平台的质量和惯量,可以模拟海洋在支撑平台上的增长效应。
一旦推导出来,耦合的风电机组和支撑平台系统的完全非线性时域运动方程一般形式为:
其中 Mij 是惯性质量矩阵的 (i,j) 分量,其非线性依赖于系统 DOF (q)、控制输入 (u) 和时间 (t) 的集合;q̈j是 DOF j 的二次导数;fi 是与 DOF i 相关的强迫函数的分量。强迫函数 fi 非线性地依赖于系统自由度及其首次导数(分别为 q 和q.),以及控制输入 (u) 和时间 (t) 的集合,并且在自由度 i 的正运动方向处为正。我在等式 (2-6) 中使用了爱因斯坦符号,它意味着当同一个下标出现在多个变量中时,所有可能的项就会相加。例如,在 FAST 中,下标 i 和 j 的范围从 1 到模型中的 DOF 总数(即,对于双叶浮动风力机,高达 22,对于三叶浮动风力机,高达 24)。
当然,当支撑平台上存在水动力荷载时,包括附加质量影响的水动力阻抗力是很重要的。这些力的附加质量分量是存在的,因为水的密度与组成主要结构的材料的密度处于同一数量级。这与风力涡轮机上的空气动力负荷相反,在这种情况下,人们通常忽略附加质量的影响,因为空气密度远小于构成主要结构的材料的密度。为了确保运动方程不是隐式的(即,我希望避免 fi 依赖于q̈),作用在支撑平台上的总外部负载(从风力涡轮机传递的负载和支撑平台的重量除外)分为两部分:与 Mij 相加的脉冲附加质量分量和与 fi 相加的剩余负载。换句话说,支撑平台上的总外部负载FiPlatform如下所示:
其中,Aij 是与 Mij 相加的冲击流体动力附加质量矩阵的 (i,j) 分量,Fi Hydro 是与 Aij 以外的一切有关的支撑平台上施加的流体动力载荷的第 i 个分量,是由所有系泊线贡献的支撑平台上施加的载荷的第 i 个分量。然后,我在方程 1 中包括了线 FiHydro 和水 FiLines 以及其余的强迫函数 fi。第 i 行 F (2-6)。在等式 (2-7) 中,下标 i 和 j 的范围为 1 至 6;每个支撑平台自由度各一个(1为浪涌、2为摇摆、3为起伏、4为滚动、5为俯仰、6为偏航)。我在第 2.4 节中讨论了水动力脉冲附加质量项和水动力强迫项的形式,在第 2.5 节中讨论了与系泊线有关的项。
我对动力学的实现并不是专门针对海上浮动系统的动态响应。它也可以作为陆基地基和固定海底地基的建模基础。对于任何类型的地基,系泊系统对动力表达式的贡献必须用土体附加质量(如果有)、弹性和阻尼的贡献来代替。对于陆基地基,水动力荷载的作用可以忽略不计。
补充
本研究旨在提供沿海潜堤对流场及泥沙输送影响的基本分析。许多实验是在克莱姆森大学流动物理实验室的二维波浪水槽中完成的。使用最先进的造波机生成波,同时使用各种设备收集有关波高、近床颗粒速度和冲刷波纹形成的数据。研究的目的是提供精确的参数化,估算防波堤引起的近岸冲刷的反射系数和几何特征,并定性地讨论防波堤近岸波纹、高原和凸起的沉积物形成。
在防波堤的设计中,对反射系数的深入了解是至关重要的,因为它们是海岸线能量的一个指标。随着更多的能量被反射到海上,海滩上的能量就会减少,从而使海岸线维持更长的时间。根据美国陆军工程兵团 (USACE) 护岸工程设计手册,护岸的主要关注点之一是波浪破坏。高能量的海浪不仅会破坏游客遍布的海滩的美感,而且风暴类型的海浪还会破坏敏感的生态系统,如珊瑚礁、湿地和筑巢区。以反射系数为中心的实验结果表明,淹没深度与入射波高的比值 a/Hi 是最重要的无量纲流场参数。建立了垂直半圆形潜堤反射系数 (Cr) 的参数化模型。3.3 和公式。3.4)。确定了反射系数参数化对a/Hi 具有相同的泛函依赖关系,而对不同参数化则采用不同的常数。此外,还推导出一个效率因子 (EF),用以比较不同形状防波堤的反射系数(见方程式。3.5)。
对两种防波堤类型进行
资料编号:[3300]



