芬兰群岛的海事交通安全分析外文翻译资料
2022-09-06 11:42:46
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
芬兰群岛的海事交通安全分析
摘要:芬兰群岛地理位置在芬兰和爱沙尼亚水域之间。芬兰群岛的海底变化多端深浅不一并且还有水下暗礁。在过去的几年这片水域的海上交通一直快速增长,特别是由于运输到俄罗斯的各种货物的迅速增加和来自俄罗斯石油运输。在本文中对芬兰群岛水域的的海事交通安全进行了分析。首先是对过去10年间的一些事故的描述,此后运用理论模型从两种角度对船舶碰撞风险进行研究。最后,将理论模型结果与实际事故统计做对比。结果揭示了在这片水域触礁是主要事故类型而且一般每年有11种触礁类型,其中一种就是油轮触礁。对于碰撞的最高风险是由来往赫尔辛基和塔林的客船或客滚船舶还有向东或向西往返于俄罗斯港口的高交通密度引起的。当与事故统计做对比后,理论碰撞模型得出了良好的结果。在理论碰撞模型中是利用AIS数据来计算几何碰撞概率。
关键词:海事交通安全;芬兰湾;碰撞模型;事故数据
1介绍
芬兰群岛地理位置在芬兰和爱沙尼亚水域之间。它是一个长400km,宽48到135km,水表面有 30000平方公里的水域。芬兰群岛的海底变化多端深浅不一并且还有水下暗礁。
在过去的几年这片水域的海上交通一直快速增长,特别是由于运输到俄罗斯的各种货物的迅速增加和来自俄罗斯石油运输。这货的一部分包括产品如汽车和电子设备还通过芬兰运和爱沙尼亚港。
此外,这片海域常年冰冻,即使海冰范围从冬天到冬天会有变化。上一个芬兰群岛全部被冰覆盖的冬天还是2003年的冬天,经历的最暖和的冬天是2008年的冬天,那时没有冰出现在芬兰群岛的海面上。冬季交通一般是从一月开始并持续到四月。冰层首先在芬兰群岛的东部(俄罗斯海岸)开始,然后慢慢向西部增长,最后在芬兰群岛西部和爱沙尼亚领海的Saarenmaa南部结束。
为提高芬兰群岛的海上交通的安全已经采取的一些措施,例如强制性船舶报告系统(GOFREP)和波罗的海定义为特别敏感水域(PSSA)这些都是在2004年开始实行的措施。可是,尤其是行走在狭窄水域的大型油轮在这片水域保持着很高的事故风险。
一些关于在芬兰群岛和丹麦水域船舶接地和碰撞风险的报告已经做出了,但是还是运输的风险依然是被估计的。了解现在存在的风险来计划预防的行动和对可能的漏油和其他事故的充分准备是非常重要的。现在的风险等级还有未来因为增长的交通导致未来改变的风险等级必须了解。在本文中对芬兰群岛水域的的海事交通安全进行了分析。首先是对过去10年间的一些事故的描述,此后运用理论模型从两种角度对船舶碰撞风险进行研究。最后,将理论模型结果与实际事故统计做对比。
2芬兰群岛海上交通的发展
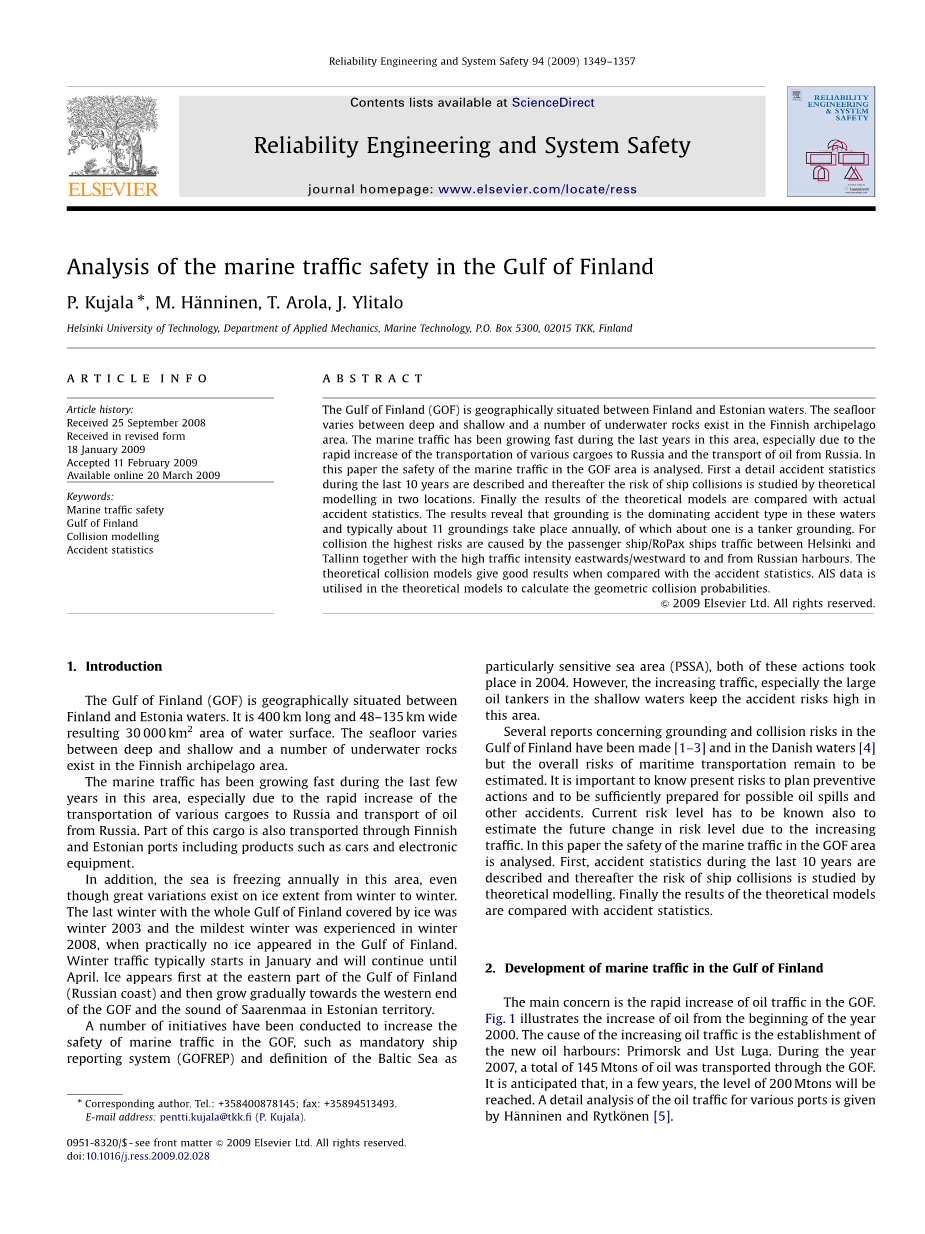
主要关注的是芬兰群岛海域石油运输的迅速增加。图1显示了从2000年初开始石油的增长。石油运输的增加的原因是新港口的建立:Primorsk和Ust Luga.在2007年中,总共有145兆吨石油运输经过芬兰群岛。可以预料,在几年的时间内,石油运输的量将达到200兆吨。Hauml;nninen 和Rytkouml;nen给出了一份不同港口石油运输的详细分析。
2006年7月,1666艘船舶进入芬兰群岛,1687艘离开芬兰群岛西去。其中61%的船舶是货船,19%的是油船,16%的是客船和4%的其他类型船舶。少于10%的油船是化学品船和油气船。剩余的是原油油轮和石油产品的船舶.可以预估到今天一天的船舶总量将比2007年7月高出10%左右。
在芬兰群岛行驶船舶的平均长度在100米到200米之间。客船的平均长度是最长的,有174.31米。例如,每时每刻仍然有超过200米的油轮在芬兰群岛内航行。油轮平均比客船和油气船大。
3航行事故
3.1数据和方法
以下的海上事故数据是基于1996年到2006年的数据。在分析中使用的数据来源是由给芬兰海事局的海事日常报告和从波罗的海海洋环境保护赫尔辛基委员会获得的事故登记组成的事故数据库DAMA。这里研究的时段从1996年年初开始一直到2006年6月底。由于数据缺失,2000年被排除,研究时段总共长度为102个月。
事故登记包括发生在芬兰群岛的事故。人为在船上发生的事故在本研究是被排除的。当事故是可用的,事故发生地点的识别是基于事故的坐标。出发地和目的港是用来确认位置的。在一些案例中,芬兰海事局的分析和芬兰事故调查委员会的分析将会一起使用来获得更多的事故细节。
3.2事故结果
3.2.1事故数量,事故和船舶类型
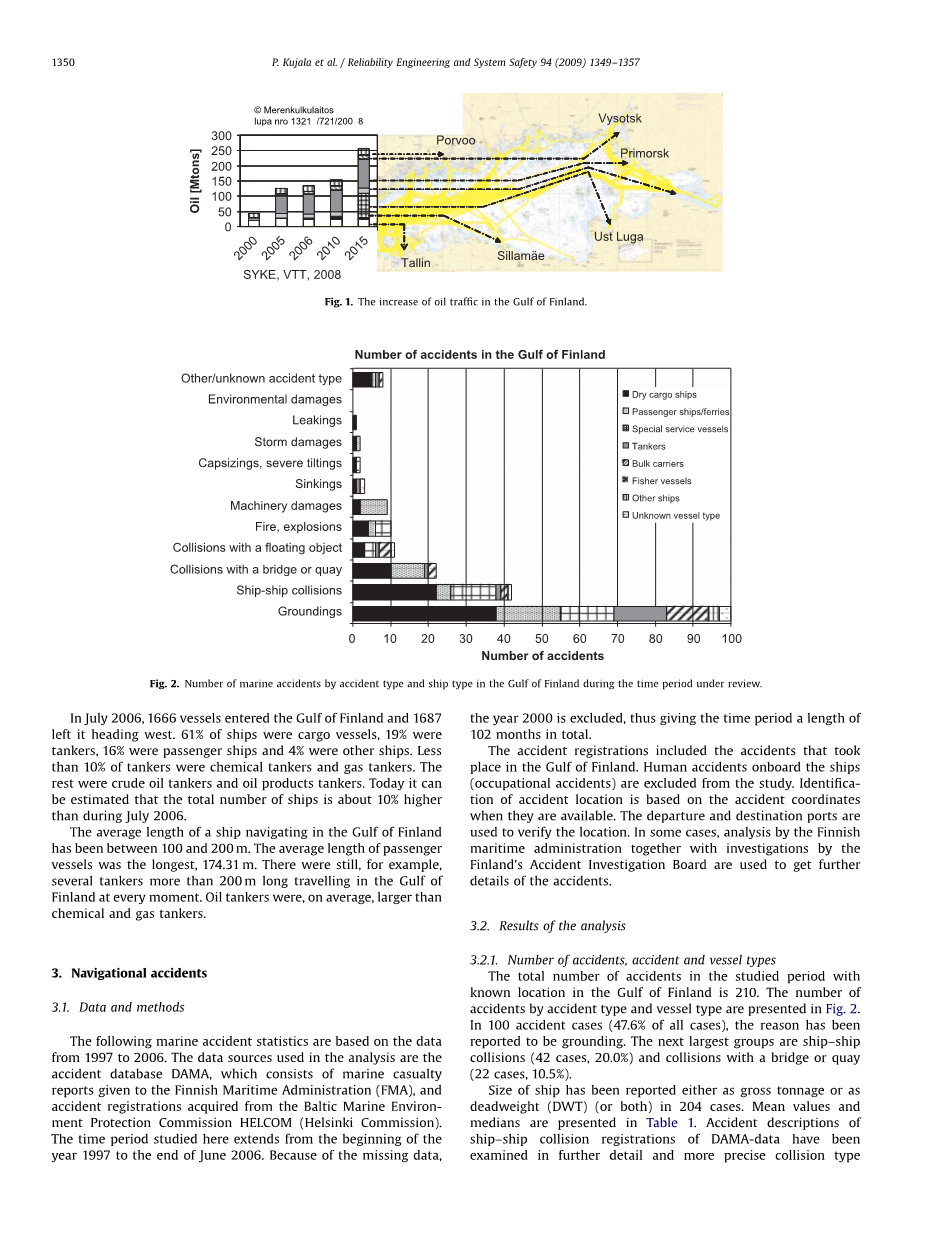
在研究期间芬兰群岛在已知位置发生的事故总数为210件。表格2中呈现的是按照事故类型和船舶类型分类的事故数量。在100件案例中(所有案例的47.6%),得出的最大的原因是触底。接下来最大的原因是船舶间的碰撞(42件,20%)和与桥或者码头的碰撞(22件,10.5%)。
在204件案例中报道的船舶大小或是总吨位或是载重吨(或两者都是)。平均值和中位数在表1中给出。数据库中登记的对事故的描述已在进一步的调查中得到检验并且更精确的碰撞比例已在表2中给出。大多数船舶碰撞(50%)都是发在船舶会遇或者船舶在浮冰通道航行的时候发生的。
年度事故频率在表3中给出。因为赫尔辛基委员会报告格式的变化,2004年之前和之后的登记数量不具有对比性,因而频率单独计算。从外国港口到在芬兰群岛的芬兰港口的船舶数量可以用作在芬兰领海按照每1000艘的比例获取年度事故发生数量。发生触底的最高数量是在1998年登记的,每1000艘有0.71艘搁浅。在2003年,记录中每1000艘仅有0.31艘发生船舶碰撞。2005年,除了船舶搁浅没有发生其他船舶类型的事故。
3.2.2事故的位置
对发生在芬兰群岛的163件记录的事故整合信息已经给出。事故发生的位置在表3中给出。事故发生的位置均匀的分布在芬兰群岛海域内。
数据库DAMA也有一个领域是针对事故的发生水域的。对搁浅,船舶间的碰撞还有所有的事故总数的水域比例在表4中给出。大多数事故发生在港口(29件,32.2%)和沿海(28件,31.1%)。大约有50%的搁浅事故是发生在沿海区域内。大多数船舶间的碰撞事故是发生在沿海外和开放水域(28.6%)。
3.2.3事故的原因
事故的原因并没有在赫尔辛基委员会1998到2003年的记录中报道。在6个其他登记的原因中报告为未知。原因已经被区分为7种,在数据库中每一个又由几个亚组组成。对搁浅,船舶间的碰撞等主要的原因比例和对所以的原因比例都在表4中给出。最大的原因分组是人类的因素:所有报道的主要因素的55.5%(81件),搁浅的67.6%(46件)和52.6%(20)的船舶间的碰撞。在34.2%的船舶间碰撞主要原因分组可以划为船舶外部环境组。事故数据显示每一由外部环境原因造成的事故都是发生在1月和3月之间。在69.2%这些案例中的原因亚组被划为“困难的冰况”。
在数据库DAMA中作为人为因素为主要原因的亚组的比例在表6中给出。总计有40.5%的人为因素被报告为没有正确的操作和26.2%为“错误理解自己船只的运动”(风等)。
3.2.4一年季节的影响
表4给出的是怎么把研究期间事故的数量按月来描述。因为2006年只要前6个月的数据所以被排除在外。在历年的最后几个月发生了很多事故。搁浅大多发生在深秋和初冬,而碰撞则大多发生在2月和3月。
3.2.5天气和光线的影响
数据库DAMA包含光线,能见度,风力,风向和海况等方面。事故在光线好和光线暗的情况下发生的频率几乎是相同的。63.8%的提供信息的记录中显示,能见度超过10千米和在76.1%的案例中有海浪不超过0.5米的海况信息记录。只有在3个案例中,风速报道为超过24.4m/s。
3.2.6事故的严重程度和损失
在数据库中有个方面是造成伤害的严重程度,选项有“不赔偿“,”小事故”,”重大事故“,“海难”和“完全毁灭”。在赫尔辛基的报道中损害赔偿的描述有所不同,如果有损害,主要描述的是船的什么部件损害了。在2004年以前,赫尔辛基的报告中一点也没有报道。在79件案例中得到报道。92.4%的这些案例被报告为小事故。有一艘船报告为海难,还有一艘船发生倾覆。
4利用船舶交通数据建立风险模型
4.1背景
在概率风险分析(PRA)和概率安全分析(PSA)中,风险被定义为发生不希望事件概率的乘积和如果它发生的后果。概率被定义为每时间单位的数量,例如作为每年碰撞数的概率。描述后果严重性的成本可能是例如一年内失踪的人命或者一年内清洗漏油的成本。风险分析的目的是找出可能要发生的是,可能性是怎么样的和后果是什么。在本文中,重点是事件发生的概率。
海上事故概率是基于Fujii et al 和 Macduff 的研究来模仿的。事故的概率被定义为:
P = Na Pc (1)
Na是几何概率或者作为在碰撞或搁浅的过程的概率。然后如果没有其他的意外事情,事故就发生了。Pc就是在碰撞或搁浅的过程中所谓的因果关系概率或者未能避免事故发生的概率。一艘船在碰撞或搁浅的过程称为一个预备。一次事故预备因为技术故障或人为因素可能会导致一次事故。因果关系概率量化事故比例是当一个事故预备因船舶搁浅或者与其他船舶碰撞结束。接下来首先分析的是因果概率,接着分析的几何概率。船舶间的碰撞时这里分析的主要类型。
4.2因果关系概率
因果关系的概率可以从场景方法和综合方法两种方式来评估。如果可在事故数据基础上计算的概率用场景方法。例如,Pedersen表示可以在不同位置上收集的事故数据来估计,然后转变为区域分析。这种方法的优点是简单和鲁棒性相关。在场景方法中,船舶上特别的情况会假定发生。如果这种情况在危机情况之前或当时发生,就可能导致事故的发生。错误情形的概率是由贝叶斯网络应用程序或者使用故障树发现的。贝叶斯网络程序是用不确定数量的图形表示的。它们现实的是由节点的无环网和向弧的不同因素间的依赖。例如,在引起船舶间碰撞因素的贝叶斯网络模型中船舶的速度和导航的张力是否作为相关的因素。对于对贝叶斯网络程序使用的详细说明,见9引用。贝叶斯网络程序是一个对搁浅和碰撞风险分析相关因素计算的一个程序,例如GRACAT。故障树一种逻辑图。它使用布尔逻辑相结合的一系列低级失误决定风险的概率,例如导航死机或者雷达失效。
因果关系因素决定涉及到交通感知,交流和回避几个动作的功能。它也取决于外部因素,例如所涉及到的潜在碰撞情况的船舶类型,天气情况等。为了获取精确的事故概率,所使用的因果因素应该反应所研究区域的具体特征和所有有问题船舶的性质。在此文献中,它只是使用的一种通用方法。在文献不同的上下文中使用的一些因果关系的因素如下表示:Pc代表穿越船舶在表7中呈现,Pc代表相遇船舶在表8.
芬兰湾的因果关系的因素也被Hanninen和Kujala研究过。研究表明应用贝叶斯网络因果关系模型和来自芬兰湾的对于相遇船舶和穿越船舶的概率是相似的。这些值是大约相同的顺序为基于文献的值在表7和表8中给出。这项研究还表明人的因素和天气会大大影响到因果关系的概率,因此概率模型参数是非常重要的。因为网络模式仍然处于建设中和有一些不足之处,如考虑在冰上航行的不同性质。Pc是从文献中引用的,它没有考虑研究领域的特殊性质。1.3times;的定义是被用于作为因果关系的因素,而4.9times;是对相遇船舶的。
4.3几何概率
4.3.1穿越交通
船只在几何碰撞的过程中,如果它与其它船舶碰撞是否有其他不希望看到做的人为操作。这个想法就像盲人导航。如果其他船舶没有察觉到或者不能充分快速改变航向,结果将会是一场事故。用于估算在两个水道穿行船舶的碰撞几何概率是基于Pederson的研究。选择的模型看起来是最合适的一个。该模型估算碰撞概率不依赖数据这和例如Fowler和索加达RD模式一样。在模型中,它定义几何碰撞预备和考虑彼此接近的船舶的特性。这些特质使其适用于被用来预测未来。Pederson的模型在许多最近的出版物上应用,例如文献。
两条水道交叉的思考在表5中展示。该模型给出了如果没有任何阻止措施的碰撞候选人或船只的数量。两艘将要到达交叉区域的情况设想过。水道1的船舶靠近水道2的船舶的相对速度为
其中是船舶在水道1的船级速度,是船舶在水道2的船级速度和角度就是在表5中显示的两个水道内船舶间的角度。船只归类为船型和长度。
几何碰撞直径为:
其中是水道1内船舶的船级长度,是水道2内船舶的船级长度。B是船舶的宽度。可能的船舶碰撞数量为:
其中水道1内的每单位时间内的船舶数量,是水道1内船舶和水道2中轴线的距离。在研究水道行驶的旁侧分布的研究船舶表示为f(x)和⊿t是研究时间的长度。方程4给出的碰撞候选数量需要与因果因子相乘,再看方程1得出碰撞概率。船周围所谓的安全域最早是由加藤提出,而由古温呈现。安全域是船舶附近其他船舶避免进入的区域。在正常条件下,安全域是在船舶方向为8L和水平方向为3.2L的椭圆,L是船舶的长度。在现实中安全域的大小和形状取决于动态参数如导航的技能和能力,天气,遭遇的角度和速度,所以其静态清晰度不是很合理。如果想估计遭遇的数目,这就意味着安全域的数目,可以在碰撞直径计算椭圆的尺寸来替代船舶尺寸。
4.3.2 正面碰撞
当船舶在狭水域内相遇,碰撞候选船舶的数量的计算也是基于Pederson的研究。可能正面碰撞船舶的数量可以从方程4中获得。对于并行水道(见图6),可能碰撞船舶的数量为:
其中是分开距离u的并行水道长度。正面船舶碰撞的概率相对于船舶交叉碰撞的概率是取决于在水道内后来船舶的位置。该模型表面分道通航制的好处。当移动到相反方向船舶的距离变大,船舶碰撞的概率就减小了。
5在芬兰群岛对碰撞模型的应用
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[146867],资料为PDF文档或Word文档,PDF文档可免费转换为Word



