船舶虚拟力场(人工力场)建模及海事应用毕业论文
2020-02-28 00:29:36
摘 要
随着航运业的迅速发展,船舶数量越来越多,船舶尺寸趋近于大型化,海事管理机构对于船舶的监管越来越严格,监管手段更加现代化。随着无人船等科技的不断发展,对驾引人员虚拟驾驶的要求也在逐步进行探讨。其中,驾引人员能否正确的感知环境风险,能否操纵船舶航行在安全的航线(航迹带)是其中一项重要的检测内容。因此,对于船舶航迹的预测需要更加准确的方法。从上世纪八十年代开始,已经陆续有研究人员对船舶自动避碰进行研究,提出了一些预测船舶航迹的模拟系统。现在,研究人员在航迹预测上取得了不少的研究成果。但通常情况下,船舶航迹的预测结果往往与实际航迹有一定差别。这是因为在预测过程中,研究人员侧重于实际力对船舶的影响,对于虚拟力(场)影响的考虑不足。然而,船舶在航行过程中不仅受到实际力对其的影响,也受到虚拟力对其的影响,故虚拟力是影响船舶航迹不可或缺的因素。
传统计算虚拟力的方法通常为传统虚拟力场法、栅格化方法等,智能化方法为模糊逻辑法、神经网络法等。本文提出改进传统虚拟力场算法,将船舶运动近似看作仿人运动,运用仿人虚拟力场模型对船舶航迹进行研究,结合离散化方法及多数据融合方法,对船舶航迹进行分析和预测。
本文所构建实际障碍物和船舶航行特有的虚拟障碍物虚拟力模型能够对实际船舶航迹进行量化预测及分析。其主旨在于挖掘和构建虚拟力作用模型,用于航迹预测与检验,为船舶虚拟驾驶安全保障进行前期研究。
关键词:虚拟力场;建模;航迹;海事应用
Abstract
With the rapid development of the shipping industry, the number of ships has been increasing, and the size of ships has become larger and larger. Maritime administrations have become more and more regulated in their supervision of ships and their supervision methods have become more modern. With the continuous development of technologies such as unmanned ships, the requirements for driving virtual drivers are gradually being explored. Among them, whether the driver can correctly perceive the environmental risk and whether it can manipulate the ship to navigate on a safe route (track band) is one of the important tests. Therefore, more accurate methods are needed for the prediction of vessel trajectories. Since the 1980s, researchers have successively studied the automatic collision avoidance of ships and put forward some simulation systems for predicting ship tracks. Now, researchers have obtained a lot of research results on track prediction. However, under normal circumstances, the ship track results are often different from the actual track. This is because during the forecasting process, the researcher focuses on the impact of actual forces on the ship, and the consideration of the virtual force (field) impact is insufficient. However, the ship is not only affected by the actual force during the navigation, but also by the virtual force. Therefore, the virtual force is an indispensable factor affecting the ship's track.
Traditional methods for calculating the virtual force are usually the traditional virtual force field method, rasterization method, etc. The intelligent methods are fuzzy logic method, neural network method, and the like. This paper proposes to improve the traditional virtual force field algorithm, approximate the ship movement as the humanoid motion, use the humanoid virtual force field model to study the ship's trajectory, combine the discretization method and multiple data fusion methods, and analyze the ship's trajectory. prediction.
The actual obstacles and the virtual force model of virtual obstacles for ship navigation can be used to quantitatively predict and analyze the actual ship track. Its main purpose is to mine and construct a virtual force action model for track prediction and testing, and to conduct preliminary research on the virtual driving safety protection of ships.
Key words:Humanoid virtual force field; Modeling; Tracks; Maritime Applications
目录
第1章 绪论 2
1.1研究目的与意义 2
1.2国内外研究现状 3
1.3论文主要研究方法及内容 4
1.3.1研究方法 4
1.3.2论文组织结构 4
第2章 航迹预测模型 6
2.1本章工作内容 6
2.2船舶交通的仿真模型 6
2.2.1仿真领域和领域理论 6
2.2.2 OFI(事件机会模型) 6
2.2.3 SMARTS(海上交通仿真系统) 6
2.2.4 MARTRAM(海上交通风险评估模型) 6
2.3 静、动态障碍物的计算分析模型 7
2.3.1 行驶路径离散化方法 7
2.3.2 矢量三角形法 7
2.3.3 BP神经网络法 7
2.3.4 传统虚拟力场法 8
2.3.5 人工势场法 8
2.3.6 生物启发神经网络模型法 9
2.3.7 仿人虚拟力场法 10
2.4 虚拟障碍物的分析模型 12
2.5 本章综述 13
第三章 船舶虚拟力场模型的构建 14
3.1 行驶路径离散化方法确定船位、多数据融合法确定航迹 14
3.1.1 船舶遇静态障碍物时的航迹 14
3.1.2 船舶遇动态障碍物时的航迹 16
3.1.3 船舶遇虚拟障碍物时的航迹 18
3.2 虚拟力计算模型与分析 19
3.2.1 静态及动态障碍物虚拟力的计算模型 19
3.2.2 虚拟障碍物的虚拟力计算模型与分析 24
3.3 预测船舶航迹模型 29
3.4 本章综述 29
第四章 船舶虚拟力场模型的未来海事应用 30
4.1 船舶虚拟力场模型的运用 30
4.2 船舶虚拟力场模型运用展望 33
4.3 船舶虚拟力场模型的不足 33
参考文献 35
致 谢 37
第1章 绪论
1.1研究目的与意义
当今世界航运业正在飞速发展,船舶越来越大型化且数量越来越多,海事监管机构对于船舶航迹的规划需要更加准确的路径。本文将可直接感知并用具体物理量衡量的作用力称为实际力,而无法直接观测,但仍对驾驶人员操纵产生影响的作用力称为虚拟力。由上述可知,实际船舶航迹的产生是由于实际力造成的船舶操纵航迹与虚拟力造成的船舶操纵航迹的叠加。故虚拟力是影响船舶航迹不可忽略的因素,因此,对于虚拟力的更深入的探讨在船舶航迹预测方面是非常有必要的。
在当前的海事监管机构中,对于船舶航行受到虚拟力影响的研究资料并不丰富,主要的研究内容大多为实际力对于船舶航行的影响,这样使得仅利用实际力预测出来的船舶航迹与实际航迹并不贴合,不利于船舶和监管机构对船舶进行有效的避碰。基于动态航行环境下,使用实际力和虚拟力叠加出来的合力进行航迹预测是更加准确的,使得航迹规划更加精确,可更加保障船舶安全航行。
本文对虚拟力场进行初步的建模,并依据模型以航道动态环境为背景从实际情况来推测船舶的航线,理论上实现由静态障碍物向动态障碍物和虚拟障碍物的过渡,加深对于影响船舶航迹因素的探讨,更加精确地推测航迹,进一步丰富海事监管机构对于船舶安全管理的手段,提高船舶航行安全。
1.2国内外研究现状
20世纪80年代,计算机技术、专家系统应用技术开始不断发展。英国利物浦理工大学以及日本东京商船大学运用专家系统应用技术解决船舶自动避碰问题。德国、英国和美国的一些大学先后研究出各自的专家系统。
90年代起,我国的高等院校及科研机构如大连海事大学、海军大连舰艇学院等也逐步开始了船舶避碰方面的研究,并取得了一定的研究成果。
21世纪初,国内外各研究机构、航海界专家学者对于船舶避碰方面越来越关注,研究方法越来越智能化、网络化,一般采用多数据融合法、虚拟力场法、神经网络模型等方法或者模型来建立和完善船舶智能避碰系统。
从后来的研究发展来看,对于有些信息不能或不易从现实世界中获取的情况下,研究人员普遍会选用仿真模型预测船舶行为。第一个仿真方法是戴维斯等人提出的,在那之后,有两种不同类型的仿真模型被开发出来。一种是SMARTS(海上交通仿真系统),这是长谷川等人研发的,运用于船舶交通仿真;另一种是对于不同种类和吨位的船舶动态仿真,运用于个别船舶动态仿真。在SMARTS系统中,船舶运动的路线和航线是预先设定的,且该系统的运用重点不在于船舶动态避碰。在船舶运动仿真模型中,因为船舶受力和人为因素的作用非常复杂,船舶的行为是被简化的,仿真结果也不是特别精确,与实际结果存在偏差。有研究人员曾运用过船舶操纵模拟器对船舶动态运动进行模拟,但是该模拟通常在某些极端状况下才使用,且水路中的不同交通模式和不确定性无法准确反映出来。后来在《Ships in an Artificial Force Field A Multi-agent 》一文中,有学者提到了ANTS模型,并加以改进,该模型使用人工力场理论描述船舶碰撞和船舶交通的细节,可以模拟出真实交通行为[5]。
目前,在智能化程度越来越高的研究环境中,一般会采用计算机进行模拟或者数据融合来预测船舶航迹。虚拟力场对于船舶的影响这方面的研究在目前来看属于比较偏冷门的研究方向,其主要的运用在于对智能机器人的避障研究。从研究资料中来看,研究人员一般采用的均为基于虚拟力场法的船舶避碰及控制研究,所运用的方法与模型较少。
从以上材料可以看出,虚拟力场对于船舶航行的影响还没有较为成熟的研究成果,有待于进一步研究。
1.3论文主要研究方法及内容
1.3.1研究方法
本文通过对武汉段长江大桥附近水域的航道内某一类船舶为例,对于其运动路线进行分析,确定出实际力与虚拟力的模型,进而推测存在静态、动态和虚拟障碍物时船舶在航道中的航行轨迹,以提高船舶航行的安全指数。
- 运用离散化方法将船舶与障碍物之间的不同相对位置标示出,便于进行下一步的受力分析。
- 运用牛顿运动学定律求出船舶所受合力的大小与方向。
- 运用仿人虚拟力场法将静态及动态障碍物对船舶的虚拟力求出,运用类比法合理推测虚拟障碍物对船舶航迹的影响,结合矢量三角形确定虚拟力合力,然后与第二步中求出的合力进行比对。
- 根据最终虚拟力合力来预测下一步的船舶位置。
1.3.2论文组织结构
本文共有五个章节,主要工作安排如下:
第1章绪论:介绍本文研究背景、目的及意义,总结并分析研究现状,确定本文研究方法及内容。
第2章航迹预测模型或系统:介绍近五十年来典型的全球范围内运用于船舶交通仿真的仿真模型和系统以及船舶虚拟力的计算分析模型。
第3章船舶虚拟力场模型的构建:先运用离散化方法标示船位,再求出船舶受力,然后利用仿人虚拟力场模型将实际障碍物的虚拟力求出,利用类比法推测虚拟障碍物的影响规律,最后得到虚拟力合力对船舶航迹进行预测。
第4章船舶虚拟力场的未来海事应用:将得出的船舶虚拟力场模型运用于船舶航迹预测,提高船舶航行安全。
第5章结论:对本文的研究结论和取得的研究成果进行总结。
第2章 航迹预测模型
2.1本章工作内容
本章主要对于全球的各种常见模型进行汇总和分析。
- 在2.2节介绍现在的一些船舶交通仿真模型,比较了各个模型在船舶交通模拟不同方向的模拟内容。
- 在2.3节介绍对实际障碍物产生的虚拟力的不同计算分析模型,详细说明了各方法的使用过程,并比较了其优劣性。
- 在2.4节介绍虚拟障碍物产生的虚拟力的计算分析模型,本文采用的是矢量三角形模型。
2.2船舶交通的仿真模型
2.2.1仿真领域和领域理论
第一个交通仿真模型是从领域理论演变而来的。船舶领域是船舶周围的区域,航行时,驾驶员会使得障碍物保持在该区域外。船舶领域理论仍在讨论中,学者们正在寻找一个普遍适用的船舶领域[5]。
2.2.2 OFI(事件机会模型)
OFI全称为:Opportunity for Incident,该模型使用的方法是动态模拟方法,用于计算有关航道内可能发生的各种事件的情况。得出的结果和概率将根据模拟结果进一步处理。在该仿真模拟中,变量有:航线、船舶之间的相互作用、船级、风速、风向、能见度等。该交通仿真模型主要是计算船舶在航道中的交互次数,而根据次数可以推断出船舶在最近会遇点的相互作用。该模型主要运用于风险模型系统,在船舶动态交通行为和船舶之间避碰的问题并没有得到充分解决[5]。
2.2.3 SMARTS(海上交通仿真系统)
SMARTS海上交通仿真系统又称为Marine Traffic Simulation System,是由长谷川等学者开发出来的一种智能仿真系统。该系统根据统计数据、数据流量及到离港口来模拟创建或删除海上交通。该系统中创建出的船舶参数都是确定的,包括如搁浅或者碰撞等操作也是由系统所管理。该仿真系统的避碰有效性尚未清楚,且环境条件未考虑在内[5],[17]。
2.2.4 MARTRAM(海上交通风险评估模型)
MARTRAM全称为:Marine Traffic Risk Assessment Model,该模型所需要的船舶吨位、船型、船速等数据均通过真实交通数据推导出来。在模型的模拟实验中,船舶航线是预先设定的,且根据航道宽度预先设定距离航道中心线的距离,而船舶领域是根据船舶吨位预先设定。但是该模型将船舶领域被入侵次数作为碰撞风险的指示,这个数据是远大于AIS中观察到的次数,可以看出模型有一定的局限性[5]。
2.3 静、动态障碍物的计算分析模型
2.3.1 行驶路径离散化方法
根据现有VTS、AIS数据将离散的船位标示出来,然后将多个点的数据融合,连接成光滑曲线,即为航迹线。然后再对不同类型船舶航迹进行拟合,最后得出不同类型船舶的航迹分布图。
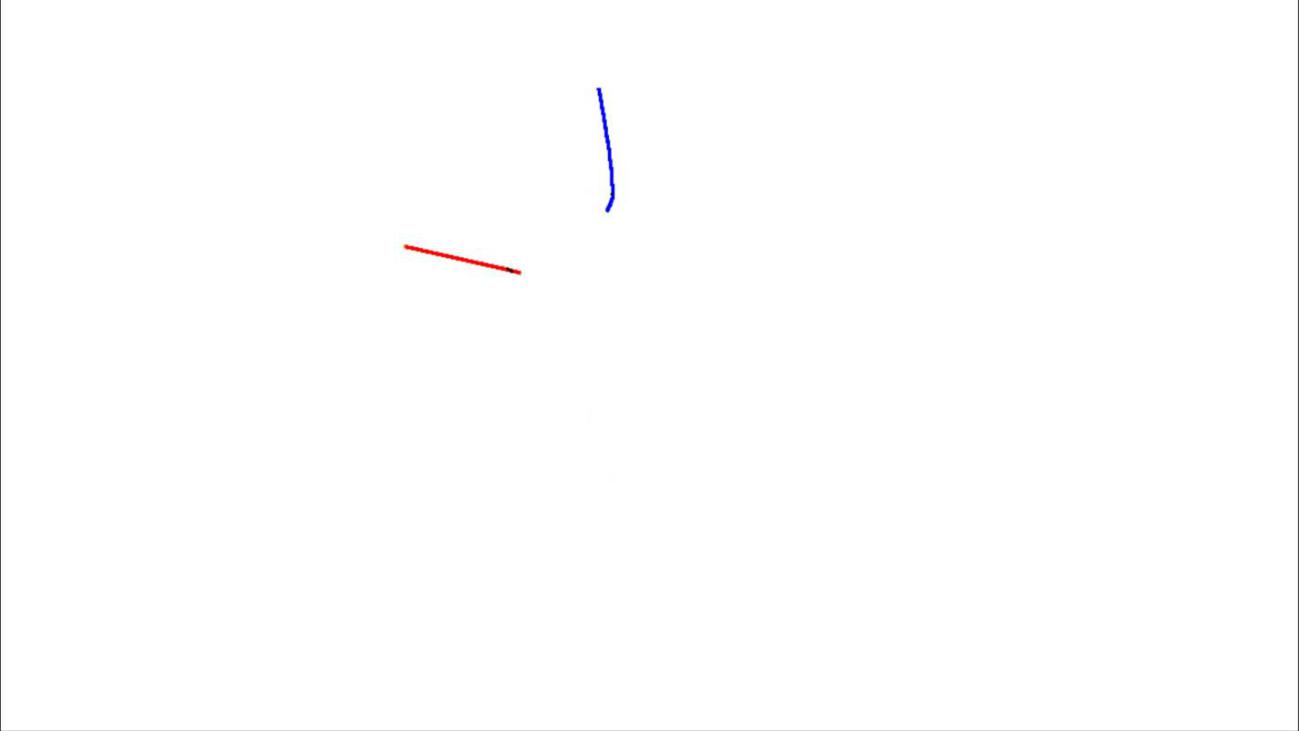
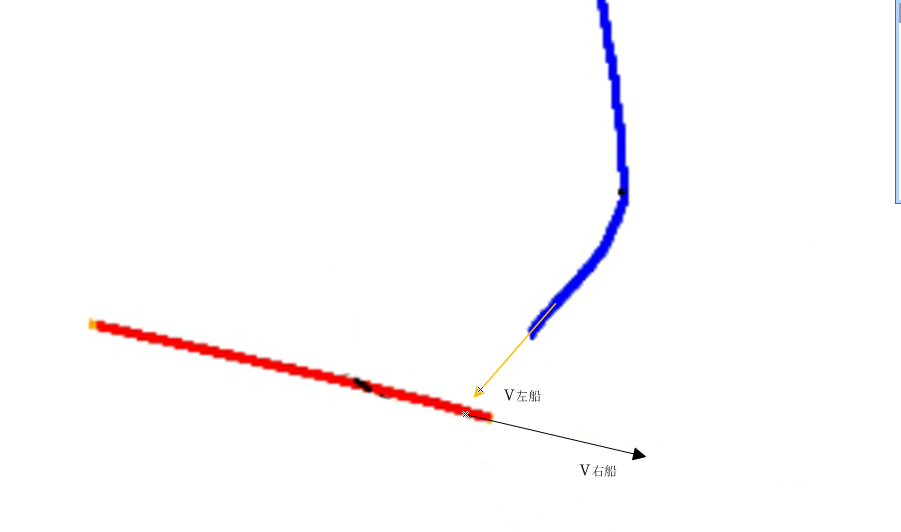
2.3.2 矢量三角形法
运用矢量三角形确定多个障碍物对船舶的虚拟力的合力。可以借助于建立直角坐标系,从几何角度可知,船舶在某点的实际航迹所在弧线的法线指向圆心的方向为瞬时合力的方向。也等同于在某一时刻,可以看作船舶在做匀速圆周运动,所受合力即为向心力,而此向心力就是所有障碍物对船舶的虚拟力的合力方向。该合力在计算出来之后可能与实际障碍物的虚拟力合力有所偏差,再次利用矢量三角形,所得的力即为虚拟障碍物对船舶的虚拟力。
2.3.3 BP神经网络法
BP神经网络全称为神经网络反向传播法(Back Propagation,BP),大量应用于信息融合领域。在模式识别方面,BP神经网络有较好的非线性逼近能力和多层感知能力。
BP神经网络拓扑结构分为输入层、隐含层与输出层。设神经网络输出层神经元m 的输入为netm,输出为ym,输入层任意神经元n的输出为yn,隐含层任意神经元的输出为yi,wmi是输出层神经m与隐含层神经元i间的连接权值,win是隐含层神经元i 与输入层神经元n之间的连接权值[20]。其中,输出层的每一个神经元的输入值等于隐含层中每一个神经元的输出值乘以连接权值之后所有乘积的和[20]。
对于输出层有:
| (2.1) |
| (2.2) |

其中 f(netm )为神经元 m 激活函数。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: