智能船舶技术下船舶避碰决策方法探讨毕业论文
2020-02-28 00:30:13
摘 要
本文首先简略地阐述了研究目的和意义,介绍了国内外智能船舶和避碰决策的现状,试图在此基础上将智能船舶和避碰决策结合起来,能有效的避免船舶碰撞事故。本文的第二部分基于国际海上避碰规则对船舶避碰原理进行阐述和分析,重点分析了船舶根据国际海上避碰规则进行避碰操作的步骤和要求。将避碰算法运用于避碰决策中可认为是智能船舶技术之一,因此文章第三部分主要研究遗传算法在船舶避碰方面的应用,其主要内容是通过对遗传算法的研究,将其运用于船舶避碰领域。通过将船舶参数转化为遗传因子、设计避碰路径方案及编码、选取合适的适应度函数、将船舶避碰行为进行遗传操作等步骤,建立了遗传算法的船舶避碰模型。为验证避碰模型是否合理有效,利用计算机仿真软件对两船在交叉相遇局面中的避碰决策进行仿真,仿真结果表明本文研究的避碰模型在两船交叉相遇局面中是可行的。
关键词:智能船舶;避碰决策;国际海上避碰规则;遗传算法
Abstract
In this paper, the purpose and significance of the research are briefly described.The present situation of intelligent ship and collision avoidance decision at home and abroad is introduced. On this basis, the combination of intelligent ship and collision avoidance decision can effectively avoid ship collision. In the second part of this paper, based on the international rules of preventing collision at sea, the principle of collision avoidance is expounded and analyzed and the procedures and requirements of collision avoidance are analyzed. The application of collision avoidance algorithm in collision avoidance decision can be considered as one of the intelligent ship technologies. Therefore, the third part of this paper mainly studies the application of genetic algorithm in ship collision avoidance, the main content of which is through the genetic algorithm. It is applied to the field of ship collision avoidance. By transforming ship parameters into genetic factors, designing collision avoidance path scheme and coding, selecting appropriate fitness function and genetic operation of ship collision avoidance behavior, a ship collision avoidance model based on genetic algorithm is established. In order to verify whether the collision avoidance model is reasonable and effective, the collision avoidance decision of two ships in the cross encounter situation is simulated by computer simulation software. The simulation results show that the collision avoidance model studied in this paper is feasible in the cross encounter situation of two ships.
Key words intelligent ship; collision avoidance decision - making; international collision avoidance rules; genetic algorithm
目录
第1章 绪论 1
1.1 研究的目的意义 1
1.1.1 研究目的 1
1.2.2 研究意义 1
1.2 智能船舶的概念 2
1.3智能船舶的研究现状 2
1.3.1 国外智能船舶研究现状 2
1.3.2 国内智能船舶研究现状 3
1.4避碰决策发展现状 3
第2章 船舶避碰原理 5
2.1船舶避碰的一般过程 5
2.2 会遇态势分析 6
2.3 安全会遇距离 8
2.4 让路船和直航船的避碰决策 9
2.4.1让路船的避碰决策 9
2.4.2 直航船的避碰决策 9
第3章 基于遗传算法的避碰模型 11
3.1 遗传算法的概述 11
3.2 基于遗传算法的船舶避碰模型 11
3.2.1 船舶避碰问题的遗传算法描述 11
3.2.2 遗传算法的因子结构 12
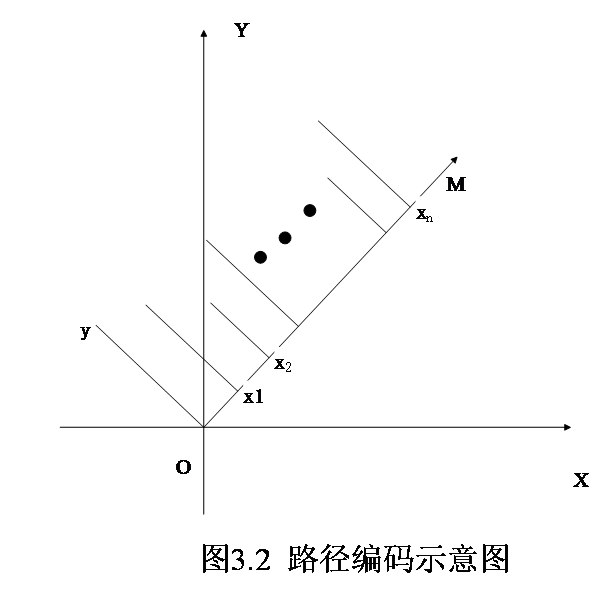
3.2.3 避碰路径生成及编码 13
3.2.4 适应度函数 14
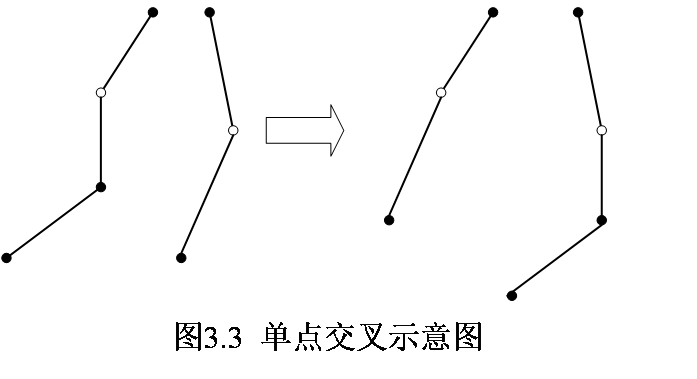
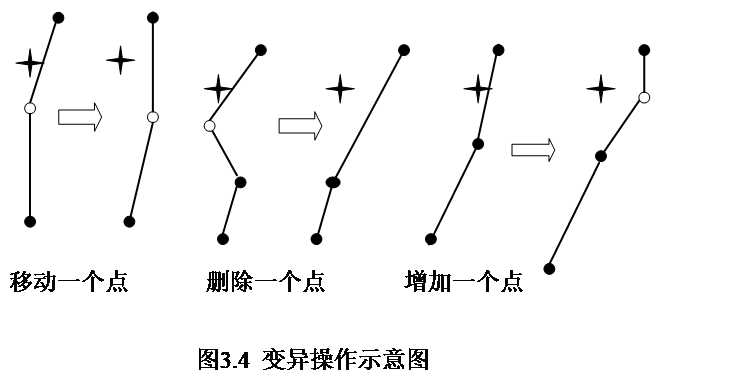
3.2.5 遗传操作中各个算子的策略 15
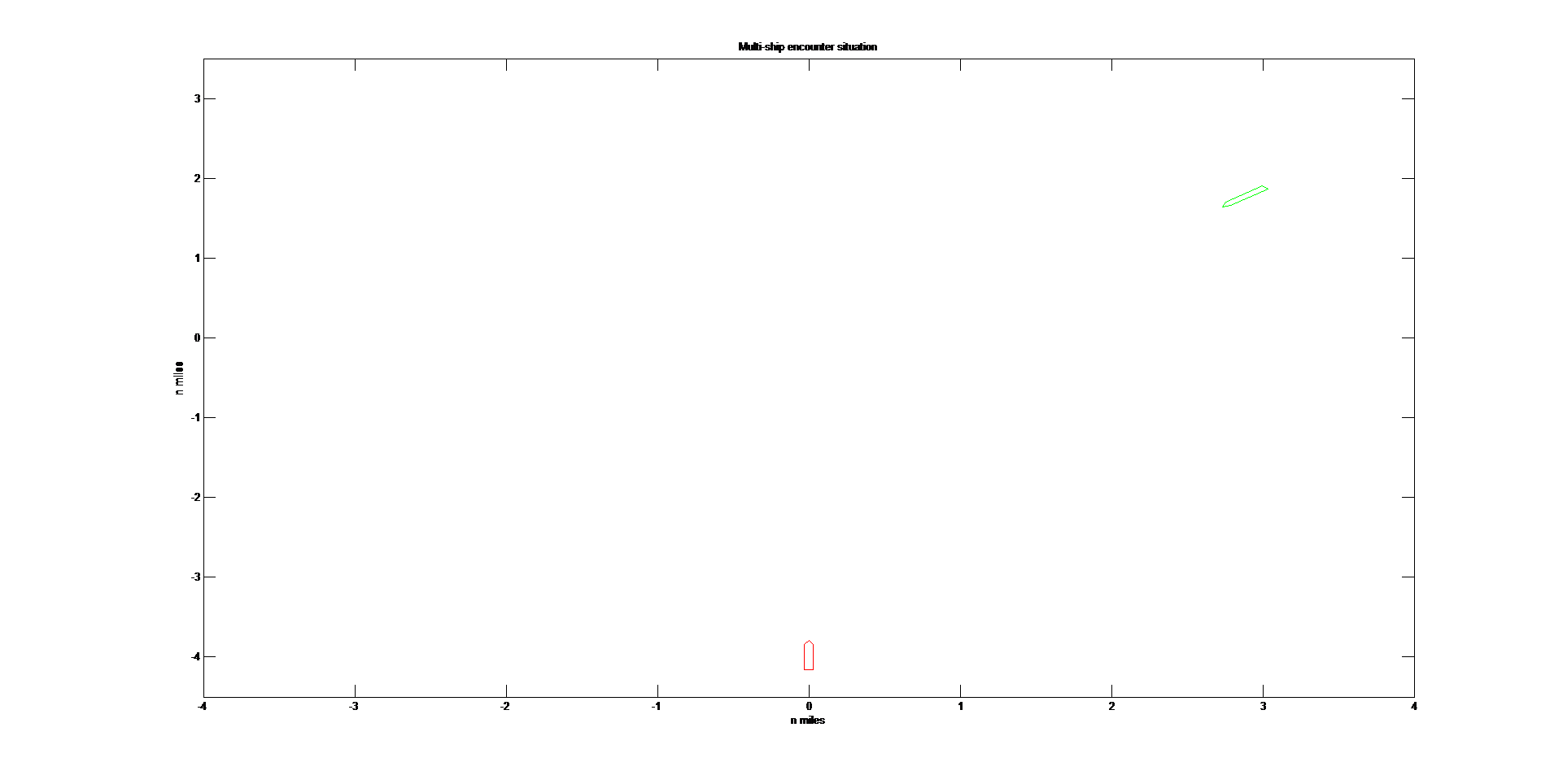
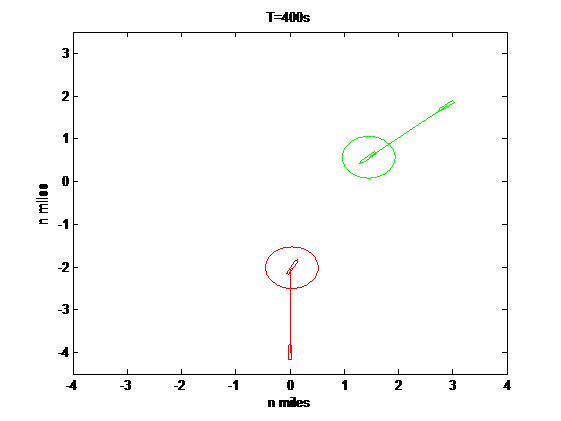
3.3 基于遗传算法的避碰模型仿真 17
3.3.1仿真场景一 18
3.3.2 仿真场景二 20
第4章 结论 24
4.1 结论 24
4.2 展望 24
参考文献 25
致 谢 26
第1章 绪论
1.1 研究的目的意义
1.1.1 研究目的
经济全球化带动了国际贸易的发展,而水路运输作为最经济的运输方式在国际贸易中占重要地位并且随着国际贸易的发展而受益。由于水路运输具有运输量大、成本低的优势,大多数国际贸易都采用水路运输方式,海上运输方式至少占全球货物运输总量的三分之二,作为贸易大国的中国也是用海上运输的方式运输了90%进出口货运总量。近年来,全球贸易量的上升致使船舶数量的激增和航线日益繁忙,因此对航运方面提出了更高的要求,尤其是水路运输相关的人命和财产安全、环境污染问题。特别是韩国“岁月号”沉船事故和“东方之星”轮翻沉事件发生后让船舶的安全问题受到广泛关注。据统计,每一年全球航运水域内都会发生多起船舶安全事故,其中船舶碰撞事故所占比例较大。而在船舶碰撞事故中,89%-96%的事故可归因于人的自身原因,包括明显的和潜在的原因[1]。
为了达到航运更安全、水域更清洁的目的,国际海事组织和各国海事机构提高了船舶安全标准,加强了海事监管力度,加强了航运安全的科研力度。在船舶营运方面通过淘汰老旧船舶,研发建造和使用新型智能船舶来减少由于船舶本身因素导致的事故数量,提高航运安全;在船员配备方面通过加强安全培训、提高考试发证标准等措施给船舶配备理论能力更好、操船技术更高的船员;在监管方面不仅加强了对船舶、船员和船公司的静态监管,还加强海事巡航、海事电子监管等手段的船舶动态监管,保障船舶安全航行。在避碰领域研究了多种避碰决策方案,使船舶能及时避让,避免碰撞事故的发生。而本文将通过对新型智能船舶和避碰决策的研究,试图将智能船舶和避碰决策结合起来,找到一种适合在智能船舶上运用的避碰决策方法,减少船舶事故的发生,降低船舶碰撞风险,实现航运更加安全、更加经济和更加环保的目的。
1.2.2 研究意义
本研究主要有以下几方面的意义:
(1)现实意义。本文通过对国内外智能船舶和避碰决策的发展现状的研究,分析智能船舶的新技术新功能和船舶避碰的新要求,结合国际海上避碰规则,采用更有效、合理的避碰方案,使船舶可以在水上安全、经济地航行,达到保障船上人员的生命财产安全,防止船舶碰撞造成的水环境污染的基本目标。
(2)理论意义。智能船舶技术下的避碰决策是未来的研究趋势。在智能船舶技术下的避碰决策的研究进展上本文的研究能有一定的促进作用,本文所采用的研究方法和方案可为海事工作人员在进行船舶避碰决策的过程中提供有效的参考价值,以提高船舶避碰操作的安全性和可靠性。
1.2 智能船舶的概念
自从2006年国际海事组织(IMO)提出e-航海概念后,世界各国开始以“信息化”、“智能化”的方式发展航运业,以达到船舶航行安全、经济和环保的目的。
国外对于智能船舶有“Intelligent Ship”、“Smart Ship”等几种表述方式,是指在船上运用现代化信息技术手段实现船舶智能化运行的船舶。智能船舶还有一种是指自动化船舶或无人船舶,由于当前国际法规和科技的限制,未来几年内完全无人化船舶无法实现下水服役,但是欧洲对于无人自主船舶技术的研究还未停止[2]。
中国船级社(CCS)于2015年12月发布、于2016年3月1日正式实施《智能船舶规范》[3]。该规范定义的智能船舶也是采用将现代化信息技术手段实现船舶的智能化。该类智能船舶将结合新型工业技术、自动控制、物联网和大数据分析等技术手段,可以自动感知和获得船舶自身、通航环境状况、港口码头信息、物流交通情况等与船舶航行、停泊、装卸货物等有关的数据和信息,可在船舶航行、管理、安全维护、货物运输方面实现智能化处理,达到智能船舶更加安全、更加环保、更加经济和更加可靠的目的。此处所谓的“智能”是指船舶收集和处理信息和数据的能力更加高效和灵活,针对不同状况,不是采取公式化、程序化的应对方式,采取灵活多变的应对方式,制定出更加安全、经济、环保的最优决策。
1.3智能船舶的研究现状
智能船舶可分为如下四个阶段[1]:
第一阶段的智能船舶实现船舶本身智能化,仅限于船用设备状态远程监控和数据分析;
第二阶段的智能船舶在第一阶段的基础上可实现船-岸信息交流智能化,可利用云计算、物联网和大数据分析等技术,通过连接岸上中心为船舶定时提供安全、环保和能效优化建议,实现半自动化航行;
第三阶段的智能船舶能在船舶数据分析的基础上,加入港口物流信息,实现船岸信息间的无缝连接,实时动态地完成航行、船期和港口操作等的优化;
第四阶段的智能船舶将脱离人的操纵,在驾驶、港口装卸物流方面实现全自主化。
从国内外智能船舶的发展状况来看,第一阶段的智能船舶已经实现,第二阶段的智能船舶正在研究和发展中。
1.3.1 国外智能船舶研究现状
英国作为世界航海强国,从17世纪至今未停止过对海洋的探索,开展了一系列的海上活动。英国劳氏船级社、奎奈蒂克集团和南安普顿大学共同合作发表了《全球海洋技术趋势2030》[4](GMTT报告),报告罗列未来对商船、军舰、海洋空间产生重大影响的技术。英国的罗罗公司联合芬兰国家技术研究中心、阿尔托大学、VTT、新加坡海工和船舶中心等世界著名研究所共同研究智能船舶技术,尤其是对无人驾驶船舶的研究[5]。2014年,该公司在挪威建立了虚拟现实原型机,可在虚拟的船桥系统上360°观察船舶。
挪威船级社(DNV)于2012年提出“航运2020”[6],在2015年更新的“航运2020”中增加了“船舶混合推进”和“连通性”两大技术发展趋势[7]。2014 年,DNV GL集团在一份关于未来航运的报告中提出“智能互联船舶”概念,并且详细提出了船舶的安全运营、先进的船舶设计、智能船舶、应用新材料、高效航运和低碳能源六大航运业未来更安全和更可持续发展的路径[7]。
日本在国际标准化组织船舶与海洋技术委员会(ISO/TC8)发起的关于《船载海上工况数据服务器》和《船载机械和设备标准数据》两项国际标准立项正式获得通过[8],标志着日本在智能船舶技术方面有了新的突破,同时意味着日本的船舶设备技术处于世界前列,能较早的设计、建造出智能船舶。
1.3.2 国内智能船舶研究现状
窗体顶端
目前国内正在积极开展智能船舶领域的研究探索,试图追赶上发达国家,跻身世界一流智能船舶国家之列。
窗体顶端
中国船级社于2015年12月发布、2016年3月正式实施《智能船舶规范》,该规范提出了智能船舶拥有智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台六大功能[3],并对智能船舶的各大功能从智能船舶的设计、制造和运营方面做出法律规范和技术标准。
2015年12月,中船集团发布了3.88万吨的i-Dolphin智能船型设计。这艘散货船于2016年9月开始建造,于2017年12月5日在上海正式交付使用,是我国研制的全球第一艘智能船舶,也是全球首艘通过船级社认证的智能船舶[9],标志了我国在船舶设计、建造上新的突破。虽然这艘船舶被称之为全球首艘经过船级社认证的智能船舶,但是我国船级社的标准较于船舶发达国家的船级社标准还是处于较低水平,因此我国在智能船舶研究上仍要不断的努力。对此,国家也给予了很大的支持和指导意见,2016年4月,工信部下发《智能制造试点示范2016专项行动实施方案》[10],明确指出船舶行业应持续开展重点企业船舶设计和建造的智能化改造。
1.4避碰决策发展现状
在避碰决策方面,雷达自动标绘仪(ARPA)和船舶自动识别系统(AIS)的出现使船舶可实时显示本船舶和周围船舶的位置、船速、航向的基本信息,并可自动计算出与周围船舶的最近会与距离(DCPA)、最近会与时间(TCPA),再由船员结合国际海上避碰规则判断DPCA、TPCA是否在安全范围内进而判断船舶是否有碰撞危险,根据判断结果采取相应的决策;或者基于ARPA和AIS的功能,通过设置船舶领域或动界提前了解本船周围的船舶情况,对船舶领域内的船舶提高警惕,观察船舶动向,以到达航行安全的目的。
结合计算机技术设计避碰算法是避碰方案研究的新形式,主要有遗传算法、蚁群算法、粒子群优化算法等。Tam和Bucknall[11]提出了一种协同路径规划算法。基于国际海上避碰规则,作者采用船舶优先级方式提出了两船和多船会遇情形下的避碰方案,并用计算仿真模拟验证了理论的正确性。Perera等[12]基于模糊逻辑的临界碰撞条件下对船舶智能导航系统进行研究,并对船舶在会遇情形的避碰决策算法进行仿真模拟,得出了两船在临界碰撞条件的避碰决策方案。不足之处是该研究未能分析多船会遇或者更为复杂情形下的避碰决策。张金奋等[13,14]建立了多船碰撞情况的分布式避碰决策支持模型,为多船会遇中的避碰问题提供了新的解决方案。田野等[15]通过船舶在开阔水域的避碰及路径优化问题的研究,并借助计算机技术对其进行多次仿真实验,创新性地提出了具有判定碰撞危险、会遇局面、避让责任和避让行动等功能的数学模型。陶丽[16]在船舶基本运动模型的基础上,采用模糊神经网络规避算法,并结合PID控制理论,对规避策略展开研究。李丽娜等[17]在研究中针对船舶拟人智能避碰决策(PIDVCA)的内涵做了重要论述。该文章基于船舶避碰的基本过程,对船舶拟人智能避碰决策理论的基本思想、总体构架、自动化原理及其实现方法、理论特点进行了详细的论述,给智能避碰领域提出了新的研究方法。马跃[18]基于船舶基本运动模型,利用模糊神经网络规避算法和PID控制理论研究船舶避碰决策,并针对船舶的多种避碰运动模式进行了详细的分析。
结合智能船舶和避碰决策的研究现状,本文认为:目前的智能船舶是运用了物联网、大数据分析、云计算等技术手段,难么在船舶避碰决策方面也可运用以上技术,设计船舶避碰算法并运用在船舶上,实现船舶在避碰决策和操纵方面的智能化。
第2章 船舶避碰原理
2.1船舶避碰的一般过程
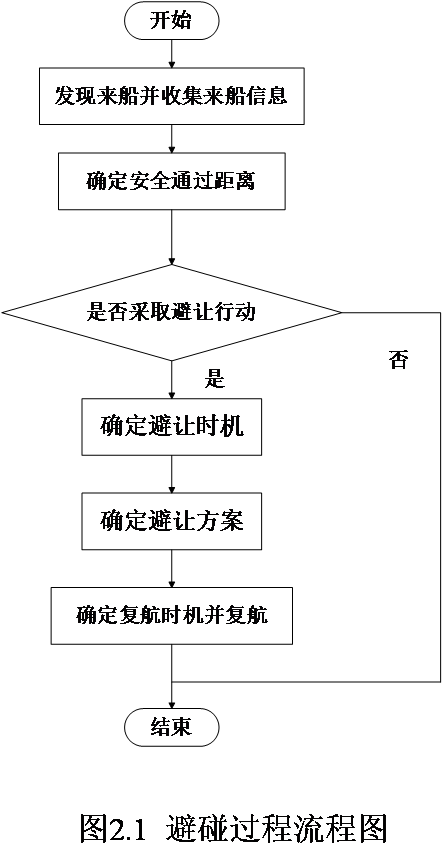
船舶在海上航行时发生致有碰撞危险的两船或多船相遇,船舶采取避碰的过程一般包括以下五个步骤:
(1)对船舶领域内的目标船舶进行标识、跟踪,搜集该船的静、动态信息;
(2)根据当时情况确定本船与目标船的安全通过距离;
(3)根据已得到的信息判断本船是否要采取避碰行动;
(4)根据已有的信息制定该通航环境下的避碰方案;
(5)根据避让效果,进行复航操作。
船舶在水上航行时,船舶驾驶员通过视觉观察或者雷达、AIS检测对进入本船船舶领域内的目标船进行标识和搜集相关信息,并对信息进行分析。然后,船舶驾驶员根据相关信息的分析结果判断会遇中的船舶是否能安全通过。若会遇局面中的船舶本船的保向保速对其他船舶的航行没有影响,则本船不采取任何避碰措施;若本船和目标船不能在为采取避碰措施的情况下安全通过,那么船舶驾驶员要根据国际海上避碰规则和船舶当时所处的航行环境判断本船和目标船的会遇类型和确定各自的避碰责任。若本船为需要采取避碰行动,船舶驾驶员要制定避碰方案,继而根据避碰方案采取避碰行动,直至本船驶过让清,到复航为止。如图2.1所示。
2.2 会遇态势分析
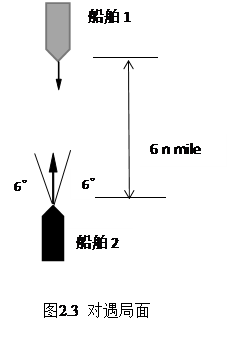
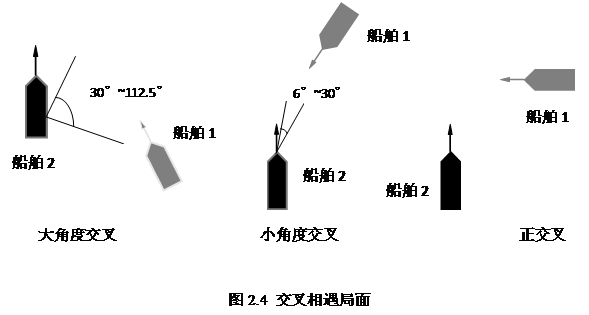
根据国际海上避碰规则,机动船在互见情形下所构成的几何格局可分为追越、对遇局面、交叉相遇局面(又分为大角度交叉和小角度交叉)。国际海上避碰规则第十三条“追越”、第十四条“对遇局面”、第十五条“交叉相遇”[19]分别对相对应的会遇局面中的机动船确定了避让关系。从法律法规上确立了船舶的避让关系和明确了船舶的避碰义务,在会遇中的船舶不会因为沟通不及时而都采取避碰行动导致避碰效果抵消的局面,或是不会引文没有成文的法律法规而使船舶事故责任承担一方逃避制裁。下面结合国际海上避碰规则介绍和分析船舶在三种会遇情况下的船舶会遇态势和避让责任。
国际海上避碰规则第十三条第2款将“追越”定义为:一船正从他船正横后大于22.5°的某一方向赶上他船时,即该船对其所追越的船所处的位置,在夜间只能看到被追越船的尾灯而不能看见它的任一舷灯时,应认为是在追越中[19]。如图2.2所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: