TerraSAR-X与TanDEM-X沿航向干涉法和多普勒中心分析法流场反演性能评估外文翻译资料
2022-11-24 15:10:17
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
TerraSAR-X与TanDEM-X沿航向干涉法和多普勒中心分析法流场反演性能评估
摘要:目前所有的利用合成孔径雷达沿航向干涉法测量海表面流场的方法均受限于短基线和与之对应的低灵敏度。理论上,大约30m基线处获得的X波段雷达的数据最为精确,也就相当于TerraSAR-X天线分离模式下基线深度的30倍。早在2012年的时候,我们获得了一个利用TanDEM-X卫星构造的次优基线来获得数据的机会。在这篇文章中,我们分析了朋特兰湾在基线25m和40m处的TanDEM-X卫星沿航向干涉图。为了对比,我们认为TerraSAR-X DRA模式下的干涉图以1.15m处的基线为准,和三个相同场景下由DCA单天线数据获得的速度场一样。我们展示了由TanDEM-X的干涉图导出的流场在33mtimes;33m的条件下可以精确到0.1m/s,而DRA模式下的数据则必须在1000mtimes;1000m的条件下才能达到同样的精度。三个例子红1km精度下参照流场的数值计算系统的结果很好地证实了这一点。就结果而言,用DCA测得的流场没有用ATI测量的那么精确,但却又更接近于ATI短基线的测量结果。我们认为,在TanDEM-X的结果证明次优基线沿航向干涉法存在的可能性的情况下,DCA比天线模式更值得选择。
关键词:干涉,雷达反演流场,遥感,合成孔径雷达
1.引言
25年前,Goldstem和Zebker描述了用合成孔径雷达沿航向干涉法测量海表面流的概念,并且提供了第一个示例结论。从那以后,这种测量海表面流的的方法被人们进一步地尝试,包括在飞行器上使用干涉雷达系统,在航天飞机上以及第一个能装置沿航向干涉系统的人造卫星,德国的TerraSAR-X。此外,一些理论研究被用来去解释流场和风场的成像原理,并且去研究为何沿航向干涉法数据的质量取决于雷达的频率,入射角,沿航向基线等等,和什么样的参数组合能得到一个高分辨率的海表流场观测结果。通过这些研究,由装置了X波段沿航向干涉系统的卫星可以知道,最佳的沿航向基线以及构成干涉图的两幅图像间关键性的延迟应该在大约20—30m处。这里,我们指的是起作用的沿航向基线,即是两个天线之间物理距离的一半。它们中仅仅一个用来传递,两个用来接收信息,也就是这篇文章干涉中TerraSAR-X和TanDEM-X数据中所提到的情况。
不幸的是,SRTM装置和TerraSAR-X的天线分离模式已经证实能作用的沿航向基线仅仅是3.5m和大约1m,分别得,导致了散射速度的次优敏感度和数以千计全解析度平均干涉图的要求来减少位相误差,这个降低了空间条件限制到100m。与这个相比,在TerraSAR-X和它的同伴TanDEM-X之间,沿航向基线超过了大部分人们感兴趣的海域。在标准的螺旋轨道图案上,北部南部点为0,赤道之上约550m,在这之间有个沿航向的距离,限制水面以上南北狭窄区域带上对干涉有用基线的范围。在沿航向基线更长的范围内,数据的精确性由当时去相关的背散射信号决定。
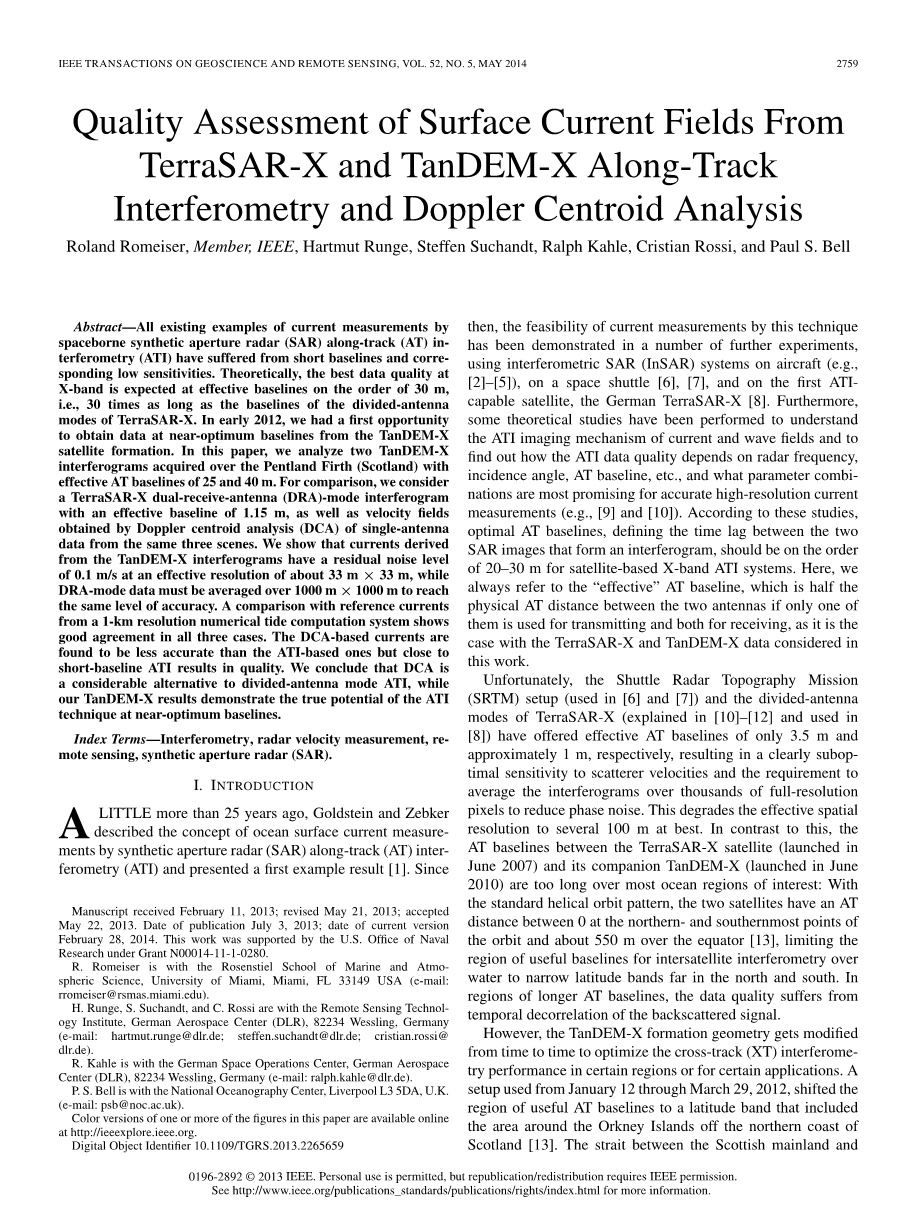
图1:地图显示苏格兰的北部和在它北部的奥克尼群岛,在朋特兰湾有个白色箭头指向。来源:谷歌地球。TerraSAR-X/TanDEM-X的数据来源于196度的上空和雷达入射角286度。
但是,随着时间推移,TanDEM-X的几何形成必将为了某一范围或某种应用的干涉性能而得到改进。一个从2012年1月12日使用到3月29日的装置,将常用沿航向基线移到一个边界带,包括奥克尼群岛与朋特兰湾的北岸。在英格兰大陆和奥克尼群岛之间的海峡,所谓的朋特兰湾,是一个海流测量很到的试验点。由于某些地方的潮流能达到5m/s的速度,这使得它们能成为能源再生的科学项目。因为这,这里的水流条件相当为人们所熟知,并且它很容易获得实地测量和数值模型模拟的数据来对比并评估沿航向干涉数据的质量。此外,在这个地方我们总是能够获得TerraSAR-X两天线 模式以及AS和DRA模式下的沿航向干涉数据,在2009年和2010年,朋特兰湾提供了一个测试沿航向干涉更长基线的绝好机会。
接下来,我们分析了朋特兰湾2012年2月26日和3月19日TanDEM-X的干涉图像数据,而且该数据质量近似于4月26日一组TerraSAR-XDRA模式下的数据。除了干涉结果,我们还认定由DCA单天线模式下的海表面场的数据也来源于相同的三个例子。作为参照,我们使用了离岸流数值模拟系统POLPRED模拟得出的流场数据。数据的获得和处理以及从干涉数据得到视角海表面流场都在下个部分详细得介绍。在第三部分,我们比较以ATI为基础的视线海表面流场和POLPRED的结果一致。在第四部分,我们对DCA的技巧进行处理,并且将DCA与ATI两者的结果做了对比。最后的总结和对未来的展望放在了第五部分。
1.数据介绍与处理步骤
图片1展示了奥克尼群岛和英格兰大陆北部朋特兰湾的位置。2009年末的时候,在已经从这片区域获得了一些实验性的AS模式下的数据,2010年4月26日,6:41,我们获得了朋特兰湾30km的TerraSAR-XDRA模式沿航向干涉的数据,也就是2012年2月26日和3月19日的6:41,几乎在同一个地方获得了两组TanDEM-X的数据。所有这三个示例 一个31度的入射角和大约1.7mtimes;2.1m的像素间隔。三个示例中风速和风向这些进一步获得的参数放置在表格1中。 风的信息由气象网站http://www.wnderground.com提供。最近的气象机构是Kirkwall的一个航天站,那是奥克尼的首都,大约在我们测试地点中心北部偏东北30km处。
- TerraSAR-XDRA模式下的数据
TerraSAR-XDRA模式下的数据来源于2010年春天一个特别的DRA模式活动。AS模式用交替的方式,以一个单一的接收器连接两部分的天线,而DRA模式在水平线使用了立体可返回的接收器,那样电磁脉冲频率能被使用并且每个天线部分都能收到30km左右地带的图像。DRA模式里最佳的沿航向基线大约在1.15m处。不幸的是,我们的数据必须在水平偏振下才能获得。我们宁愿它是水面往上的垂直偏振,因为那样会有一个更强的背向散射信号和该信号的误差比例。
图2:2010年4月26日6:41 UTC TerraSAR-X数据,平均到25mtimes;25m的网格:(a)干涉振幅(b)一致性(c)干涉位相转换成水平多普勒速度。显示区域大小约30kmtimes;30km;雷达观察方向:从右到左;正速度方向:由左到右。
基本的SAR处理和干涉代已经在遥感技术那部分进行过,德国航空航天中心也在奥伯法芬霍芬,德国使用的优化程序中描述了。进一步的分析是在美国迈阿密的FL大学里完成的。首先第一步,将干涉的复杂像素平均到约25mtimes;25m的网格单元内,平均每个网格单元对应15times;12=180个原始像素,同时,复杂像素在量级上(干涉振幅,即两幅振幅图像的结果,使图像强度保持一致)被平均,用来获得一个低分辨率的强度图像,并且通过合成所有 ,最后能计算每个网格单元。下一步,低分辨率的干涉图的位相转换成多普勒水平视线速度,并且通过装置二次改正功能来消除大规模方位的走向,结果展示在图2中。注意该数据显示 图像的坐标中,即视线方向正好在图中是从右到左,检测到的多普勒速度和所有接下来讨论的视线方向的流场都在这个方向对齐,并且一致指从左到右的运动。图2(a)显示这些图像相对南北方向大约旋转了16度。
在这个空间分辨率下由DRA模式获得的数据仍然存在很大的误差,所以为了获得更有价值的流场估计,进一步平均是必须的。读者可能会惊讶这样一份存在如此之多位相误差的数据竟然有一个相当好的连贯性(朋特兰湾 水面之上的连贯性=0.81)。其原因在于这样一个事实,即这样短的基线,显示出来的多普勒水平速度间隔大约10m/s,与之对应的是ATI位相间隔大约只有pi;/18或18度(见表一的“速度范围”专栏)。因此,干涉原图中的复数波动在一个相当狭窄的位相范围内,其对应于比较高的一致性。但是,波动主要由仪器误差控制,而不是实际散射速度的变化为主导,这使得多普勒速度看上去存在误差而不需要进一步修饰。就像[10]里面讨论的,我们所描述的TerraSAR-X仪器具有良好的降低仪器误差的水平,对具有极短基线的AS模式和DRA模式下的ATI数据有着特别的负面影响。
B.TanDEM-X数据
就像在[13]中谈论的一样,从2012年1月12号使用到3月29日的几何意义的TerraSAR-X/TanDEm-X轨道适用于在奥克尼地域进行次优沿航向基线下的流场测量。我们能计划用TanDEM-X科学项目的结构获得数据,包括为了基线最优而对卫星轨道做的一些特别的调整。由此产生的有效沿航向基线分别是25和40m,相对的,在2pi;的位相范围内分别映射水平速度9.14和5.69m/s(见表1)。与此同时,23—24m处的XT基线导致了相同位相间隔内映射了大约200—210m表面海流范围。由于海平面实际的高度变化比这小了两个量级,在我们对于干涉图的分析中会忽略那些能被检测到的位相变化。但是,XT基线导致了一个均衡的位相补偿,取决于作为参照平面海表面的高度,派生速度的绝对标准必须被考虑在内。不同于DRA模式的例子,TanDEM-X的数据是在VV极化下获得的。
再一次,两个TanDEM-X示例基本的SAR处理和干涉代已经在DLR完成了,所有进一步的处理方法都在迈阿密的大学里完成了。因为由于XT基线导致的位相补偿是未知的,我们在多普勒速度场和流场间介入了一个绝对的标准,即海岸线垂直,迫使雷达入射角为0。这个方法也被用来调整在[6]和[7]中遭受同样问题的由SRTM派生出的流场。为了消除不同雷达和不同模型对校准问题的影响,我们在图2中对DRA模式的结论做了同样的调整,并且我们在第四节中调整了以DCA为基础的多普勒速度场和流场的平均值,使它们能与相对应的ATI结果的平均值匹配(DCA的结果不曾包括以海岸线流场标准为基础校准后合适的海岸线)。
图片3展示了在25mtimes;25m网格单元上平均后的干涉振幅,相关性和多普勒速度。为了与图片2中DRA模式的数据形成对比,TanDEM-X数据展示了当前分辨率流场表面非常清楚的信号,尽管2月26日连贯性水平为0.72,3月19日连贯性水平为0.68.随着连贯性的降低,由于背向散射信号暂时去相关导致了AT基线的增加。但是,与此同时,当仪器相关误差保持不变的时候,由散射速度引起的位相贡献变得更大,即信号误差的比例增大。同时,TanDEM-X次优基线下获得的速度观测数据的质量高于DRA短基线模式下获得的数据,因为信号误差比去相关的负面影响更为重要。但是,由于AT基线的增加,连贯性在持续降低,导致数据太低之后不再适合干涉图。低连贯性也会导致来自海洋表面的背向散射能接近或者低于仪器误差水平,例如图片3(a)—(c)中底部靠近海岸的区域,那里展示了低强度的图像、低连贯性以及非常粗糙的多普勒速度。
图3:相同于图2,但是从在2012年(上)2月26日到(下)3月19日,TanDEM-X的数据都是在6:41 UTC这种情况下可以容易的达到校正位相折返的效果。
另一个长基线的问题是位相变化。当一个测试区域的散射速度变化范围大过2pi;位相内映射出的速度范围,一些位相变化甚至达到了正负pi;的地步,这样大的速度出现为负的,反之亦然。为了纠正这一点,我们必须确定受到影响的网格点,必须增加或减去模糊的速度,延长总的速度范围并超过映射范围[—pi;, pi;]。2012年3月19日,在TanDEM-X场景的中间,我们有个位相变化的示例,中心区域的水平速度超过了极限2.85m/s。该区域在图片3(f)中用蓝色显示而不是以红色显示。由于真实的速度场是光滑的,我们可以很容易得就发现位相变化区域的边界并且改正错误。
C.初步数据质量分析
细致观察图3(C)和(f)后可以发现,在图3(a)中多普勒速度展示的波动图案关联于干涉振幅图案中明显的部分,同时图片4展示的是图3(a)和(c)详细放大后的情形。为了这个目的,干涉图平均到仅仅5times;4的原始像素,结果产生了8.4mtimes;8.46m的网格。事实上,干涉振幅和位相信号有着明确和一致的波动图案。占主导地位的波浪有着大概200m的波长。 虽然对波浪信号的详细分析已经超出了本文的范围,但我们会继续研究它,并且在另外的场合发表我们的结果。
图4:图3(a和c)放大后的图(2012年2月26日),展示了干涉(a)振幅和(b)位相转换成水平多普勒速度。在此,全分辨率的数据平均到8.40mtimes;8.46m的网格单元(每个网格单眼5times;4个样品);区域大小:10kmtimes;10km。
对TerraSAR-XDRA模式和TanDEM-X数据质量的定量比较可以通过分析剩余多普勒速度波动来完成,当做是取平均样本数目的功能。在2010年4月26日和2012年3月19日,我们已经做了两幅均匀的4096times;4096全分辨率干涉图。在这种均匀条件下,我们选择的是空间流场变化非常小的区域,这使得位相和多普勒速度的均方根变化率可以归于信号去相关和一起误差影响,而不是由于流场的变化。在这两种情况下,适合这个目的的子图像被显示在图2和图3 的右上角。我们平均了合成数组1,2,4,8hellip;hellip;直至样本的真实和虚构的部分,并且每一步之后都重新计算相关的位相,使得第一步让我们计算4096times;4096原始像素之间位相变化的均方差,第二步让我们计算2048times;4096间,第三步是在2048times;2048间,最后一步是取剩余4times;4=16的平均值。最后,位相变化的均方根被转换成水平多普勒速度的不确定性。结果示于图5。
图5:基于ATI的视距的剩余不确定性(均方根的变化)由同质的4096times;4096像素全分辨率的子阵列获得的多路了速度和平均样本TerraSAR-X卫星干涉从2010年4月26日开始,TanDEM-X干涉从2012年3月19日开始
我们一直认为理想的流场观察的误差大概在0.1m/s或者更小,图5展示了DRA模
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[30030],资料为PDF文档或Word文档,PDF文档可免费转换为Word



