基于卡尔曼滤波的轨道不平顺识别毕业论文
2020-02-19 16:31:54
摘 要
当列车在轨道上行驶时,将发生车辆轨道系统的耦合振动,并且引起车轮轨道系统耦合振动的因素是多种多样的。其中,轨道不平顺是主要因素之一。在线路建设和列车运行中,铁路轨道将不可避免地产生不平顺,如水平,高低,轨道方向等不平顺等,这不仅会对列车车辆运行的平稳性、舒适性产生负面影响,还会起到激励的作用。车轮轨道之间接触的作用力会对设备造成损坏。国内外铁路运输系统的实践表明,即使轨道结构完全满足设计强度的要求,当轨道平顺性较差时,由较差轨道平顺性所引起的车辆振动和轮轨作用力会随着车辆运动速度的提高急速增大,列车脱轨的可能性大大提高。轨道的平顺性是限制列车运行速度的最重要的因素之一。对轨道不平顺性的研究对于列车和路线的设计以及车辆轨道耦合振动系统的动态研究以及轨道状态的科学评价具有重要意义。
本文以振型叠加法建立由弹簧支承的一跨简支梁的车辆轨道耦合振动模型,以轨道不平顺作为未知激励,推导了时变系统下含未知输入的卡尔曼滤波算法。通过列车上的部分振动响应的观测,采用本文推导的卡尔曼滤波实时准确地估计出车辆轨道振动响应和轨道不平顺。卡尔曼滤波方法是一种用来实现最优状态估计的方法,从一系列存在测量噪声的数据中,最大限度过滤测量噪声,从而估计动态系统的状态,且对模型不敏感。所以将卡尔曼滤波应用到轨道不平顺的估计当中具有很好的适用性。研究结果表明当观测值数量多余未知激励数量时,通过前几阶振型叠加法建立的车轨耦合振动模型来估计轨道不平顺具有可靠性。车辆轨道振动系统为时变系统,如果不考虑轨道振动的情况下估计轨道不平顺会导致很大的误差。此外,轨道刚度缺失会产生巨大的等效几何不平顺,这种轨道缺陷对轨道不平顺有着剧烈的影响。
关键词:卡尔曼滤波;车轨耦合振动;轨道不平顺;时变系统
Abstract
When the train is running on the track, the coupling vibration of the vehicle track system will occur, and the factors that cause the vehicle-track coupling vibration are various.Among them, the track irregularity is one of the main factors.In the construction of the line and the train operation, the railway track will inevitably produce irregularities, such as horizontal, high and low, track direction and other irregularities.It will not only adversely affect the stability and comfort of the train operation, but also serve as an excitation source for the vehicle vibration system, causing the wheel-rail contact force to cause damage to the equipment.The practice of railway transportation system at home and abroad proves that even if the track structure fully meets the requirements in terms of strength, when the smoothness of the track is poor, the vibration of the vehicle and the effect of the wheel-rail action caused by the track irregularity will increase with the driving speed. The sharp increase in the number of times increases the risk of derailment of the train. The smoothness of the track is the most important factor that restricts the speed of the line. Research on the track irregularity is of great significance for the design of trains and lines, the dynamic study of the vehicle-track coupling dynamics and the scientific evaluation of the orbital state.
In this paper, the vehicle-track coupled vibration model of a span-supported beam supported by a spring is established by the vibration mode superposition method. The track irregularity is used as the unknown excitation, and the Kalman filtering algorithm with unknown input under time-varying system is derived. Through the observation of the partial vibration response on the train, the Kalman filter deduced in this paper is used to accurately estimate the vehicle's orbital vibration response and track irregularity in real time. The Kalman filtering method is an optimal state estimation method. From a series of data with measurement noise, the measurement noise is filtered to the maximum, thereby estimating the state of the dynamic system and being insensitive to the model. Therefore, the application of Kalman filtering to the estimation of track irregularity has good applicability. The results show that when the number of observations exceeds the unknown number of excitations, the vehicle orbit coupled vibration model established by the first few modes is used to estimate the track irregularity correctly. The vehicle orbital vibration system is a time-varying system, and if the track irregularity is not considered in consideration of the orbital vibration, a large error is caused. In addition, the lack of orbital stiffness produces a large equivalent geometrical irregularity that has a dramatic impact on track irregularities.
Key words: Kalman filter; vehicle-track coupled vibration; track irregularity; time-varying system
目 录
第1章 绪论 1
1.1车载轨道不平顺问题的提出 1
1.2 车载轨道不平顺的研究现状 2
1.2.1 国外车载轨道不平顺研究现状 2
1.2.2 国内车载轨道不平顺研究现状 3
1.3 车载轨道不平顺研究的背景和意义 4
1.4 本文研究的内容和方法 5
1.5 本章小结 6
第2章 车辆-轨道耦合振动动力学模型 7
2.1车辆模型 7
2.2轨道模型 8
2.3 车辆-轨道几何约束方程 10
2.4 车辆-轨道运动方程 11
2.5 本章小结 12
第3章 轨道不平顺检测的传统方法及技术 13
3.1 轨道不平顺传统检测方法及发展状况 13
3.2国外轨道不平顺检测技术发展状况 14
3.3 国内轨道不平顺检测技术发展现状 15
3.4 本章小结 15
第4章 基于卡尔曼滤波估计车载轨道不平顺 16
4.1滤波的概念 16
4.2 卡尔曼滤波 16
4.2.1 卡尔曼滤波的原理和背景 16
4.2.2 卡尔曼滤波器的优势 16
4.3 状态空间方程 17
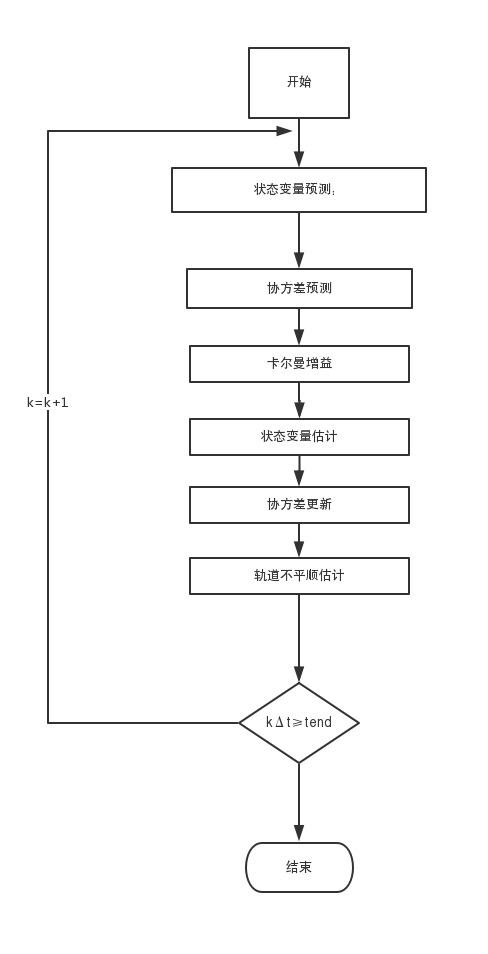
4.4 卡尔曼最优估计 18
4.5 本章小结 22
第5章 算例分析 23
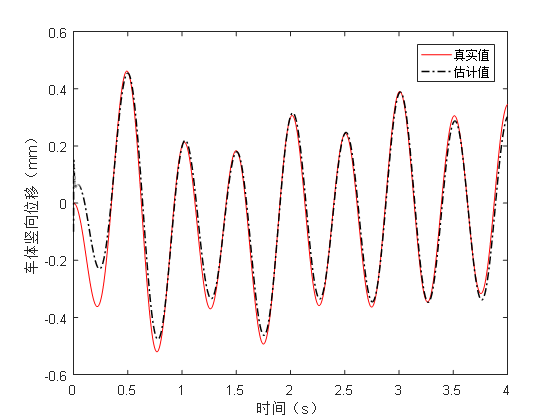
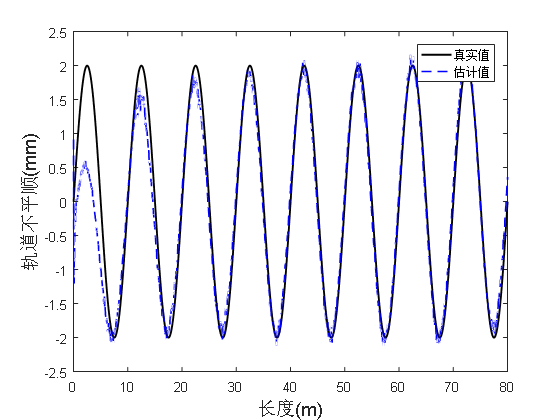
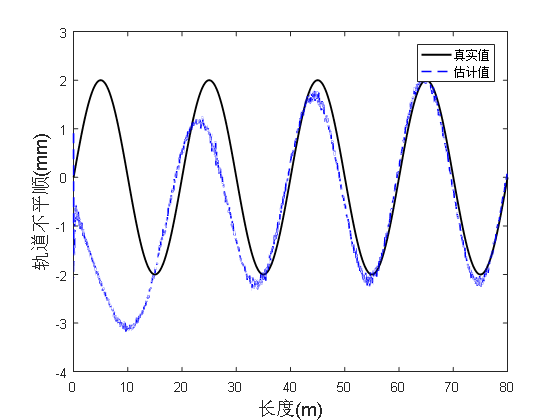
5.1 采用正弦函数模拟轨道不平顺 23
5.2 不考虑轨道振动的轨道不平顺识别 26
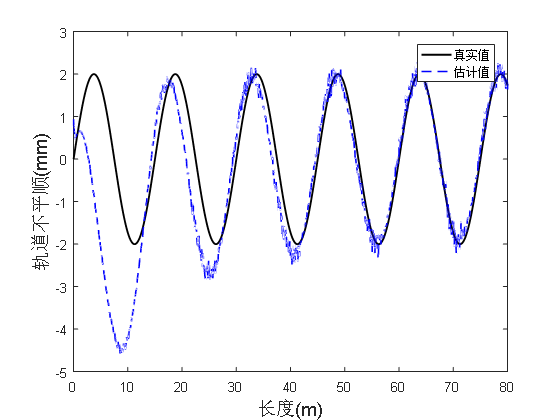
5.3不同速度、加速度对轨道不平顺估计的影响 29
5.4 轨道刚度缺失时车体参数和轨道不平顺识别 32
5.5 本章小结 35
第6章 总结与展望 36
6.1 总结 36
6.2 展望 36
参考文献 38
致 谢 40
第1章 绪论
1.1车载轨道不平顺问题的提出
随着近年来我国高速列车提速和高速铁路的快速发展,列车车辆与轨道结构之间的动态作用日益增强,轨道振动和疲劳损坏越来越严重,车辆运行速度越高,列车车辆在轨道上的行车安全与行车平稳性问题日益显著。车载轨道结构既要同时保证车辆高速运行时不颠簸、不脱离轨道,又要保证高速运行的列车具有较好的乘坐舒适度。列车车辆的载重越大,车轮轨道之间的动力作用就会越强,列车车辆对轨道结构的动力破坏作用也越发显著。
轨道结构是由钢轨、轨枕、道床组成的,它是一个易变形的结构钢轨沿着列车的行驶方向,两钢轨在高低、左右方向上相对与标准位置产生了一些偏差,这种在几何方向上的偏差称为轨道的不平顺。轨道不平顺对列车车辆系统是一种可以增大车轮轨道之间作用力的外部激励,是产生列车车辆系统振动的最主要的原因,因而研究轨道不平顺以及识别轨道不平顺具有重要意义和作用。
轨道不平顺的分类主要有:1)高低不平顺,即由于道床或者路基沉降不均匀等原因在列车运行方向钢轨的垂向凹凸。2)水平不平顺,即在轨道的横断面上由左右两钢轨顶面之间的高度差值。3)扭曲不平顺,即左右轨道顶面与轨道标准平面之间产生相对扭曲。4)轨距不平顺,即左右两轨之间水平距离在列车运行方向的上发生的变化。5)轨道方向不平顺,即轨道内侧面中心线在列车运行方向的扭曲或者偏差。在这诸多的轨道不平顺中,轨道高低不平顺和轨向不平顺分别是轨道在垂直方向和横向上的最基本的不平顺形式,所以当前轨道的高低不平顺和轨向不平顺是轨道不平顺检测中的主要检测指标。
轨道不平顺不仅是由于轨道钢轨在设计和生产制造过程中本身的误差和轨道本身的材料引起的,轨道在施工过程中的施工质量不达标产生的多种起始不平顺也会造成轨道不平顺。这些轨道不平顺的因素具体表现在轨道道床不均匀变形、道床板松散、轨道路基不均匀残余变形、轨道路基不均匀沉降、轨枕失效等。在轨道系统运营开通之后,在机车车辆轮载反复作用下,车载轨道不平顺现象将逐步增大并进一步恶化。机车车辆的轮轨冲击作用也会促进轨道不平顺现象的产生,并且会进一步使轨道不平顺恶化。除了这些主要的影响因素,外界环境的变化和轨道检修外业等因素也对轨道不平顺的产生、恶化有着不可忽视的影响。
轨道不平顺是导致轨道和机车车辆产生振动及破坏的主要原因。随着高速列车的发展,轨道线路的质量需要达到更高的标准,为了达到更高的标准,必须对轨道的结构设计和轨道不平顺进行严格的监控和检测。为了保障行车安全舒适、指导轨道维护保养、评定轨道质量,对轨道不平顺进行检测都是首要任务。近年来,随着国家“一带一路”政策的大力实施,铁路交通运输行业再一次成为发展热点,高速列车轨道的振动性能以及安全性能,车辆行车安全控制以及舒适性研究越来越受到轨道专家和学者的广泛关注。
1.2 车载轨道不平顺的研究现状
1.2.1 国外车载轨道不平顺研究现状
英国学者Grassie[1]认为轴箱加速度计测量系统是以线速度获得统计分布数据的最合适的方案。其他加速度计测量系统是以每秒几米的速度来获取数据,但却受外界振动影响较大。并且轴箱加速度计测量系统可以在列车高速运行时进行测量,并且考虑轮轨力的作用,所以轴箱加速度计测量系统可以被安装在高速运行车辆上对轨道不平顺状态进行估计和检测。
日本的Kawasaki[2]提出了一种通过测量乘用车的加速度而不是使用传统检查车直接测量来估计轨道不平顺的方法。基于系统识别技术,构造具有轨道不平顺的三维轨道车辆模型来模拟获得数据,从而构造了一个逆向系统,其中车辆加速度是输入值,轨道不平顺是输出值。
Westeon[3]等在运行中车辆的转向架上安装加速度计和速率陀螺仪传感器来估计轨道几何参数,实现了对轨道几何参数的连续实时监控,这有助于轨道的维护。并且指出可以在车体的左右轴箱上安装加速度计,从而识别出短波长的轨道不平顺。
美国伊利诺伊大学的Molina[4]等人开发了一种机器视觉系统,该系统包括一个视频采集系统,用于记录轨道的数字图像和自定义算法,以识别图像中的轨道缺陷,通过测量车体各个振动响应结合惯性基准在线监测、估计和预测轨道不平顺。所研发的机器视觉系统还可以结合轨道不平顺、缺陷等历史数据,增强长期预测评估轨道系统及其组件的健康状况的能力。
日本国立大学的Naganuma [5]等人将轨道的几何参数定义为带有外部输入和几何参数的随机游走模型,设计了一种卡尔曼滤波器来估计未知轨道的参数和几何不平顺,采用不同运行速度的脉冲响应发生器,通过获取车身加速度,结合卡尔曼滤波对轨道不平顺进行估计。
米兰理工学院的S.Alfi[6]研究发现当高速列车行驶速度达到300km/h的时候,轨道不平顺中20~120m波长范围的不平顺所产生的列车振动频率与列车固有振动频率十分接近,因此通过对车体速度、加速度等振动响应的测量,提出了一种估计横向轨道不规则性的频域方法,可以识别波长在20m以上的轨道不平顺。
Molodova[7]等人提出了通过对轴箱加速度进行测量,从而评估轨道技术状态,通过有限元模拟,研究了不同状态下轴箱的加速度和轨道缺陷、不平顺之间的关系,从而通过轴箱加速度估计出轨道不平顺。
美国维吉尼亚理工学院的Brad M. Hopkins[8]提出了一种可以用于便携式数据采集系统的轨道健康缺陷检测算法,该系统可以从一列火车移动到另一列火车,该系统的算法利用小波对数据进行分析和处理,可以对轨道缺陷进行定位,并提供有助于区分不同类型钢轨缺陷的信息,实现了检测和诊断日常运行中列车所在轨道的缺陷或者不平顺状况。
东京工业大学的Weuibong[9]等人提出了一种估计车辆系统状态变量和轨道绝对位移的方法,建立了七个自由度的车辆模型,将卡尔曼滤波应用于由车辆系统和成形滤波器组成的增广系统,采用成形滤波器,输出功率谱密度等于路面位移的功率谱密度,输入白噪声,在增广系统中采用帕德近似来考虑前后轮输入值之间的时滞,从而估计出轨道的不平顺。
日本国立大学的Hitoshi Tsunashima[10]等人采取了一种仅用车身运动状态估计新干线轨道几何不平顺的方法,利用卡尔曼滤波求解了从车身运动状态估计轨道几何不平顺的逆问题,实现了垂直方向的轨道不平顺估计。
1.2.2 国内车载轨道不平顺研究现状
在国内,西南交通大学杨强[11]博士基于NARX神经网络,提出了一种时域轨道不平顺的估计方法,建立车辆响应到轨道不平顺的逆向系统模型,利用该神经网络的多步输入输出延迟来反映系统的动态特性,很好的反映了轮轨接触系统的非线性特征。
柴晓东[12]等人借助捷联惯性系统,借助加速度计、陀螺仪等测量装置,在计算机中建立数学平台,通过计算机对信号的转换,得到运载体的速度和位置,再借助积分滤波器对轨道不平顺进行估计。
北京交通大学的路天玙[13]提出了一种基于BP神经网络的轨道不平顺估计方法。该方法是先将一段列车振动加速度响应和对应的轨道不平顺的特征提取出来,然后将其输入到BP神经网络里进行训练,然后将下一段车辆振动加速度响应输入到该神经网络,即可估计出下一段轨道不平顺,进而估计出完整的轨道不平顺演变趋势。
张健[14]等人采用逆虚拟激励法实现了轨道不平顺的功率谱的识别,把车体轴箱的加速度作为测量目标,通过该方法将平稳的轴箱加速度功率谱转换成轴箱位移功率谱,利用轴箱的加速度状态来预测轨道的不平顺状态。
北京交通大学的汪煜婷[15]利用matlab平台建立了城市轨道系统的模型,采用了功率谱密度函数、小波变换、傅里叶变换等信号时域、频域的分析方法,提出了基于信号时频域的轨道不平顺检测方法,并利用这种分析方法实现了对城市轨道上的特殊位置的轨道不平顺的检测。
南京理工大学的陈岳剑[16]通过matlab软件中的GUI模块建立车轨耦合模型,然后通过采集轴箱加速度、车速和车体构架的角速度通过带通滤波和自适应补偿滤波对信号加以处理,实现了轨道不平顺的检测,然后又通过扩展卡尔曼滤波结合观测方程和状态方程对不平顺进行了有效的估计。
北京交通大学的杨航[17]利用Fortran语言编程建立了车轨耦合系统的模型,将轴箱加速度通过二次积分的方法得到车轮的的位移时程曲线,从而通过车轮的竖向位移来估计轨道的高低不平顺。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: